本篇文章所有代码基于 FreeRTOS Kernel V10.3.1,配套完整可运行的示例位于项目中 projects/02_list,使用 QEMU + STM32L475 平台仿真运行,基于VS Code的可视化在线调试方法可参考上篇文章告别硬件开发板,手把手教你零成本学习 FreeRTOS,学习内容也可以参考微信公众号:青衫嵌入式, 本项目源码开源地址:gitcode.com/qingshan120...
一、引言:为什么链表是 RTOS 的命脉?
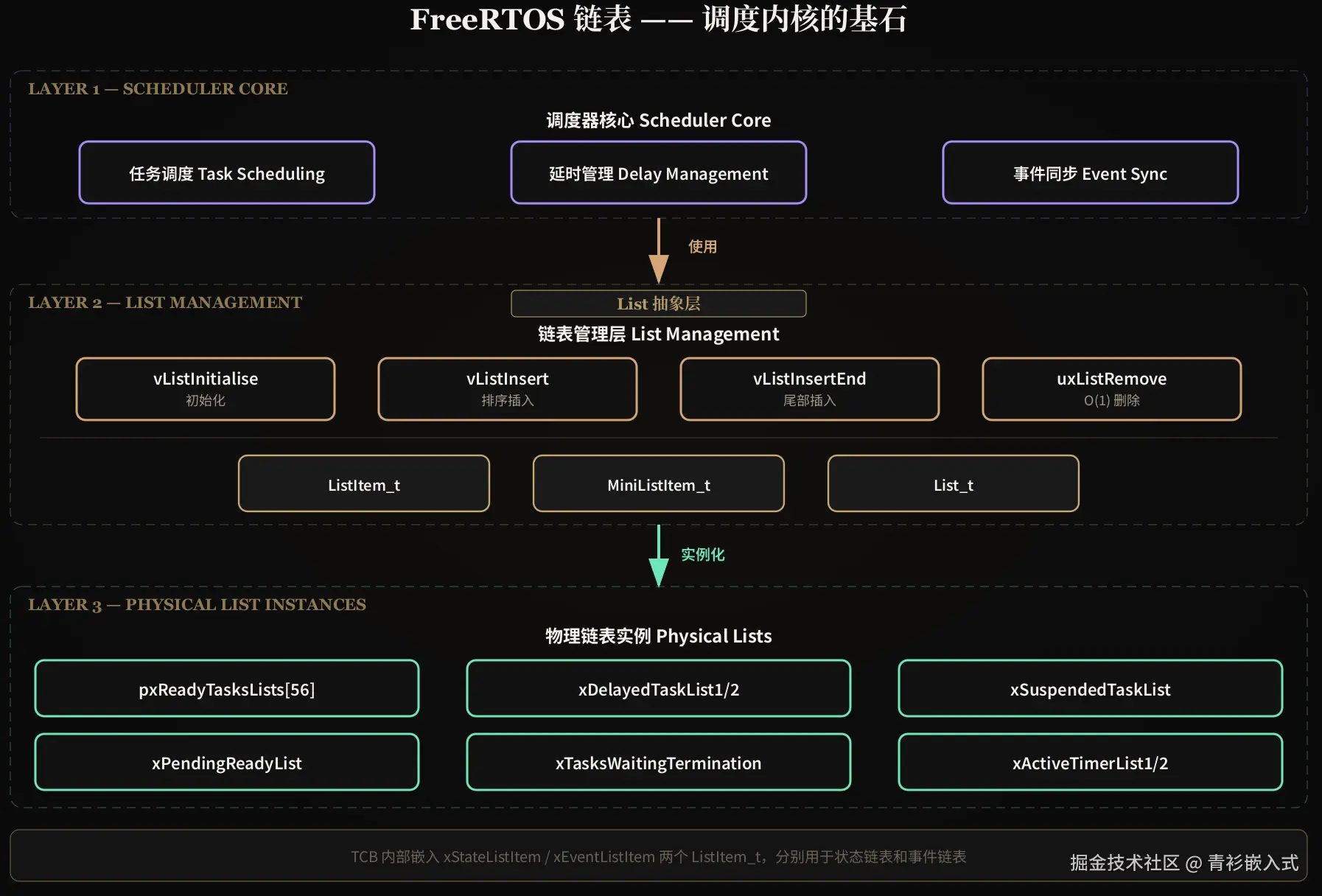
当你调用 xTaskCreate() 创建任务,调用 vTaskDelay() 让任务等待,或者调度器在 tick 中断中切换任务时------所有这些操作的背后,都离不开同一个基础数据结构:双向循环链表。
在 FreeRTOS 中,链表被用来管理:
| 用途 | 对应列表 |
|---|---|
| 就绪任务 | pxReadyTasksLists[优先级] |
| 阻塞/延时任务 | xDelayedTaskList1 / xDelayedTaskList2 |
| 挂起任务 | xSuspendedTaskList |
| 空闲任务 | xTasksWaitingTermination |
| 软件定时器 | pxTimerList |
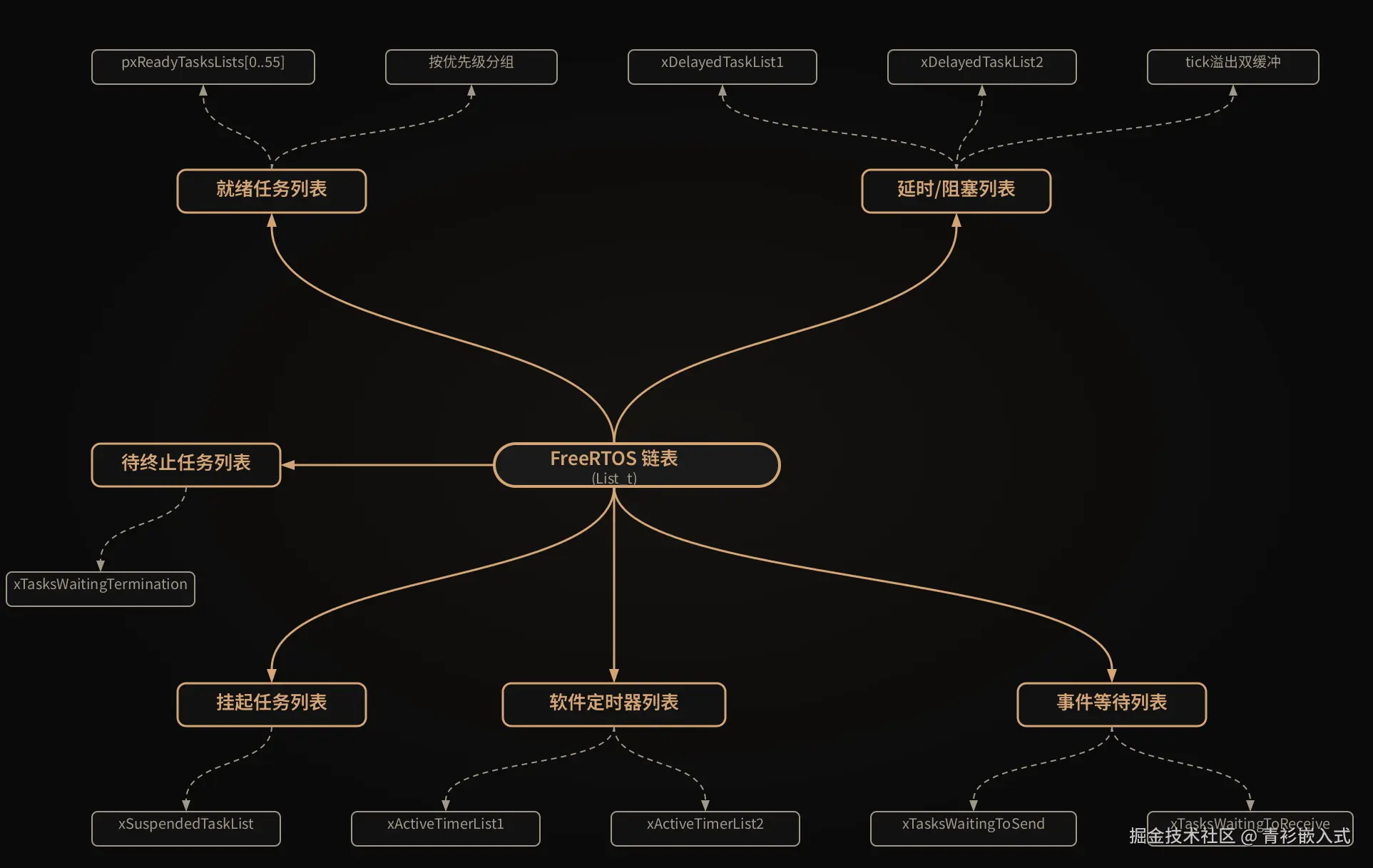 可以说,理解了 FreeRTOS 的链表,就掌握了理解调度内核的入口。
可以说,理解了 FreeRTOS 的链表,就掌握了理解调度内核的入口。
本文围绕 projects/02_list 中的 7 个演示,逐一拆解 FreeRTOS 链表的全部核心 API,并配合运行输出验证。
二、核心数据结构
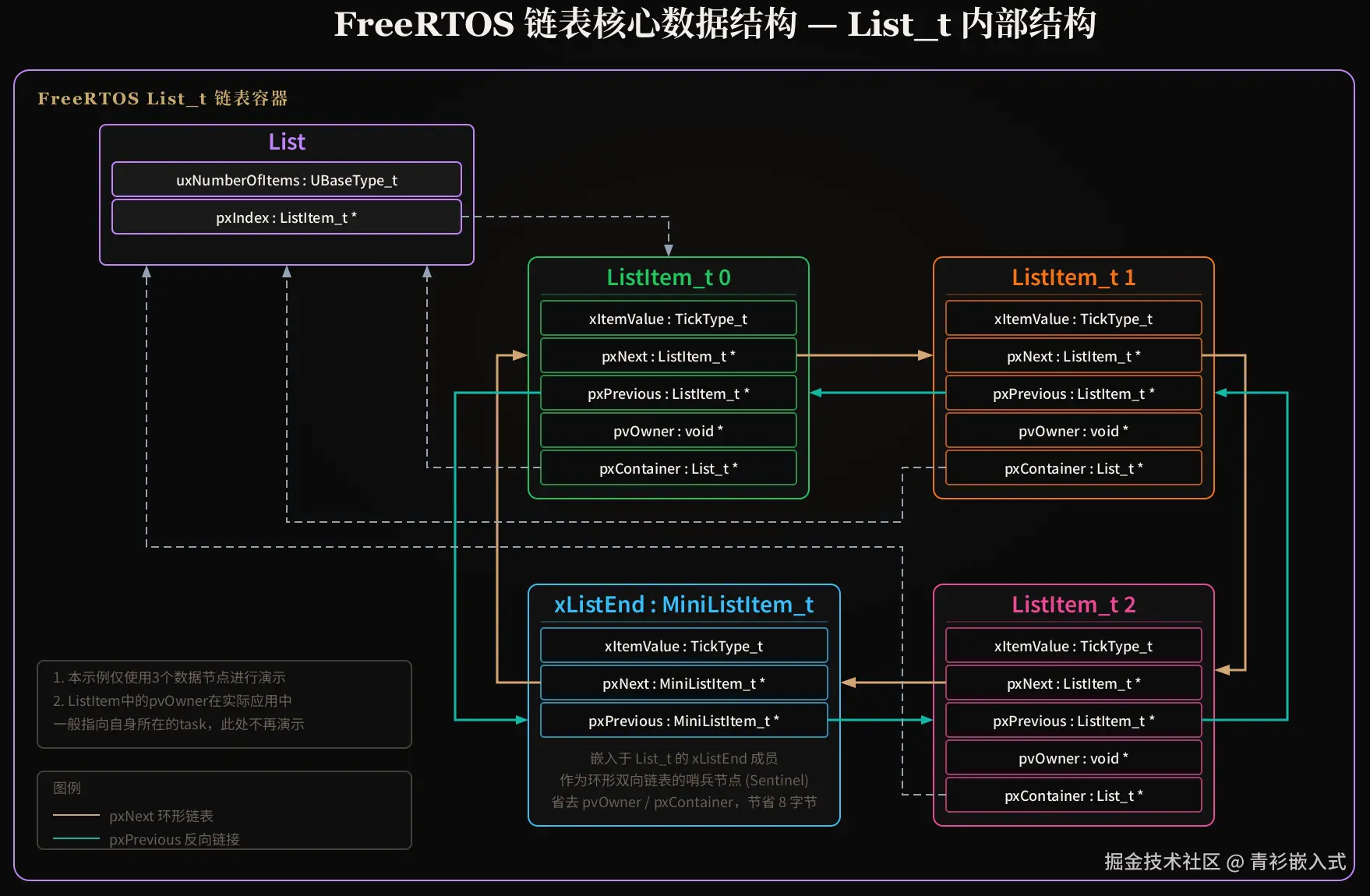
2.1 链表节点:ListItem_t
c
struct xLIST_ITEM {
TickType_t xItemValue; // 节点的排序值
struct xLIST_ITEM *pxNext; // 指向下一个节点
struct xLIST_ITEM *pxPrevious; // 指向前一个节点
void *pvOwner; // 指向"宿主"对象(如 TCB)
struct xLIST *pxContainer; // 指向所属的链表
};
typedef struct xLIST_ITEM ListItem_t;关键设计思想:
- xItemValue ------ 排序依据。就绪链表中用任务优先级,延时链表中用任务的唤醒时间点。
- pvOwner 双向关联 ------ 节点知道自己属于哪个对象(Owner),Owner 反过来嵌入节点。TCB 结构体内部就嵌有一个
ListItem_t。 - pxContainer ------ 节点知道自己在哪条链表里,这使得
uxListRemove()可以不依赖链表指针,仅凭节点自身就能完成删除。
2.2 迷你节点:MiniListItem_t
c
struct xMINI_LIST_ITEM {
TickType_t xItemValue;
struct xLIST_ITEM *pxNext;
struct xLIST_ITEM *pxPrevious;
};
typedef struct xMINI_LIST_ITEM MiniListItem_t;与 ListItem_t 相比去掉了 pvOwner 和 pxContainer。仅用作链表的结尾标记,节省 RAM(不要小看节省的 8 字节,在 RAM 以 KB 计量的 MCU 上弥足珍贵)。
2.3 链表头:List_t
c
typedef struct xLIST {
UBaseType_t uxNumberOfItems; // 节点计数
ListItem_t *pxIndex; // 遍历游标
MiniListItem_t xListEnd; // 结尾标记节点
} List_t;2.4 结构关系总览
用下图展示三个核心数据结构的关系:
 初始化后,
初始化后,xListEnd.pxNext 和 xListEnd.pxPrevious 都指向自身 ------ 这是空链表的标志。
三、链表初始化:vListInitialise
c
void vListInitialise(List_t *const pxList)
{
pxList->pxIndex = (ListItem_t *)&(pxList->xListEnd);
pxList->xListEnd.xItemValue = portMAX_DELAY;
pxList->xListEnd.pxNext = (ListItem_t *)&(pxList->xListEnd);
pxList->xListEnd.pxPrevious = (ListItem_t *)&(pxList->xListEnd);
pxList->uxNumberOfItems = 0;
}初始化后的状态:
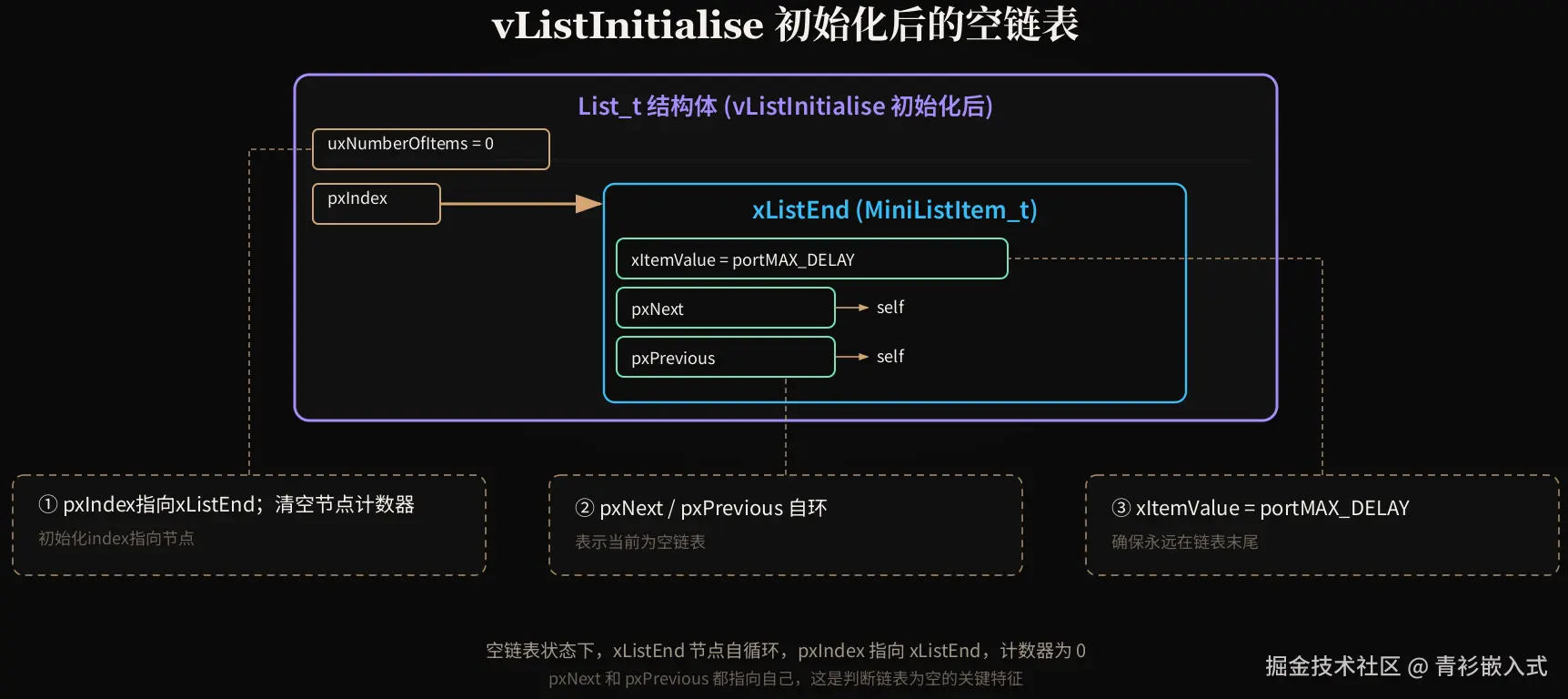 三个重点:
三个重点:
xListEnd.xItemValue = portMAX_DELAY------ 赋值为最大值,确保它在排序时永远在链表末尾。pxNext = pxPrevious = &xListEnd------ 自环结构,表示空链表。pxIndex = &xListEnd------ 遍历游标初始指向结尾标记。
演示 1 运行输出:
yaml
--- 演示1: vListInitialise ---
listLIST_IS_INITIALISED: 是
listLIST_IS_EMPTY: 是
listCURRENT_LIST_LENGTH: 0四、排序插入:vListInsert
这是 FreeRTOS 链表最核心的操作。
c
void vListInsert(List_t *const pxList, ListItem_t *const pxNewListItem)
{
ListItem_t *pxIterator;
const TickType_t xValueOfInsertion = pxNewListItem->xItemValue;
if (xValueOfInsertion == portMAX_DELAY) {
pxIterator = pxList->xListEnd.pxPrevious;
} else {
for (pxIterator = (ListItem_t *)&(pxList->xListEnd);
pxIterator->pxNext->xItemValue <= xValueOfInsertion;
pxIterator = pxIterator->pxNext) {
/* 遍历找到合适的位置 */
}
}
pxNewListItem->pxNext = pxIterator->pxNext;
pxNewListItem->pxNext->pxPrevious = pxNewListItem;
pxNewListItem->pxPrevious = pxIterator;
pxIterator->pxNext = pxNewListItem;
pxNewListItem->pxContainer = pxList;
(pxList->uxNumberOfItems)++;
}插入逻辑图解
假设依次插入:A(30) → B(10) → C(50) → D(20) → E(40)
 排序规则核心: 遍历时,条件
排序规则核心: 遍历时,条件 pxIterator->pxNext->xItemValue <= xValueOfInsertion 表示"继续向前走,直到下一个节点的值大于新值"。这意味着:
- 按值升序排列(小值在前)。
- 相同值时,新节点插入到所有相同值节点之后 ------ FIFO 行为。
演示 2 运行输出:
ini
--- 演示2: vListInsert (排序插入) ---
插入顺序: A(30) B(10) C(50) D(20) E(40)
预期结果: B(10) D(20) A(30) E(40) C(50)
-- vListInsert 结果 (共 5 项)
[0] B value=10
[1] D value=20
[2] A value=30
[3] E value=40
[4] C value=50
=> 验证: 按 xItemValue 升序排列正确五、相同值处理:FIFO 行为
当多个节点具有相同的 xItemValue 时,vListInsert 将它们按插入顺序排列,先入先出(FIFO)。
c
// 循环条件 <= 保证了新节点插在所有 <= 自身值的节点之后
pxIterator->pxNext->xItemValue <= xValueOfInsertion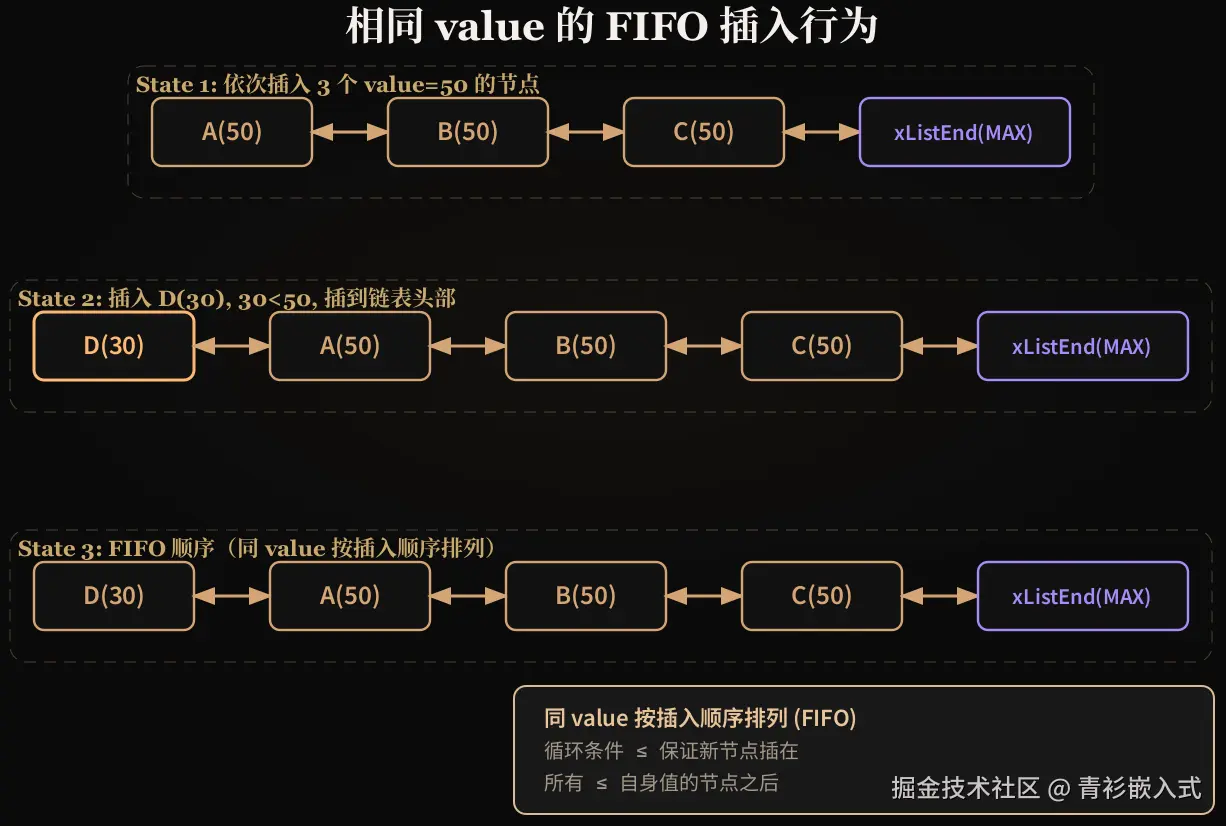
演示 6 运行输出:
ini
--- 演示6: 相同 value 的 FIFO 插入行为 ---
插入: A(50) B(50) C(50) D(30)
预期: D(30) -> A(50) -> B(50) -> C(50)
-- 相同 value 插入结果 (共 4 项)
[0] D30 value=30
[1] A50 value=50
[2] B50 value=50
[3] C50 value=50
=> 同 value 按插入顺序 FIFO,值小的在前重要影响: 在就绪链表中,同优先级的任务按 FIFO 顺序被调度,这正是 FreeRTOS 的同优先级时间片轮转的实现基础。
六、尾部插入:vListInsertEnd
与 vListInsert 不同,vListInsertEnd 不按值排序 ,而是将节点插入到 pxIndex 游标的当前位置之前(逻辑尾部)。
c
void vListInsertEnd(List_t *const pxList, ListItem_t *const pxNewListItem)
{
ListItem_t *const pxIndex = pxList->pxIndex;
pxNewListItem->pxNext = pxIndex;
pxNewListItem->pxPrevious = pxIndex->pxPrevious;
pxIndex->pxPrevious->pxNext = pxNewListItem;
pxIndex->pxPrevious = pxNewListItem;
pxNewListItem->pxContainer = pxList;
(pxList->uxNumberOfItems)++;
}插入位置图解
 注意:
注意: pxIndex 的初值就是 xListEnd,所以第一次插入时 vListInsertEnd 的效果实际上等同于在列表末尾追加。但 pxIndex 会随着 listGET_OWNER_OF_NEXT_ENTRY 的遍历而移动。
演示 3 运行输出:
ini
--- 演示3: vListInsertEnd (尾部插入) ---
vListInsertEnd 保留插入顺序,不按 value 排序
-- vListInsertEnd 结果 (共 3 项)
[0] X value=300
[1] Y value=200
[2] Z value=100
=> 顺序: X(300) Y(200) Z(100) 与插入顺序一致注意:X(300) 在 Y(200) 之前,而 Z(100) 在最后,完全保留了插入顺序,无视 value 大小。
七、删除操作:uxListRemove
删除是最简单的操作------因为节点自身保存了 pxContainer 指针,只要传入节点即可完成删除。
c
UBaseType_t uxListRemove(ListItem_t *const pxItemToRemove)
{
List_t *const pxList = pxItemToRemove->pxContainer;
pxItemToRemove->pxNext->pxPrevious = pxItemToRemove->pxPrevious;
pxItemToRemove->pxPrevious->pxNext = pxItemToRemove->pxNext;
if (pxList->pxIndex == pxItemToRemove) {
pxList->pxIndex = pxItemToRemove->pxPrevious;
}
pxItemToRemove->pxContainer = NULL;
(pxList->uxNumberOfItems)--;
return pxList->uxNumberOfItems;
}删除过程图解

三个关键细节:
pxContainer自动清零 ------ 删除后节点不再认为自己属于任何链表。pxIndex保护 ------ 如果删除的刚好是游标指向的节点,游标自动回退到前一个节点,防止遍历指针悬空。- 返回值是有用信息 ------ 返回删除后链表中剩余节点的数量。
演示 4 运行输出:
ini
--- 演示4: uxListRemove (删除链表项) ---
-- 插入 5 个元素 (共 5 项)
[0] A value=10
[1] B value=20
[2] C value=30
[3] D value=40
[4] E value=50
删除C(中间) 后剩余: 4
-- 删除C后 (共 4 项)
[0] A value=10
[1] B value=20
[2] D value=40
[3] E value=50
删除A(头部) 后剩余: 3
-- 删除A后 (共 3 项)
[0] B value=20
[1] D value=40
[2] E value=50
删除E(尾部) 后剩余: 2
-- 删除E后 (共 2 项)
[0] B value=20
[1] D value=40
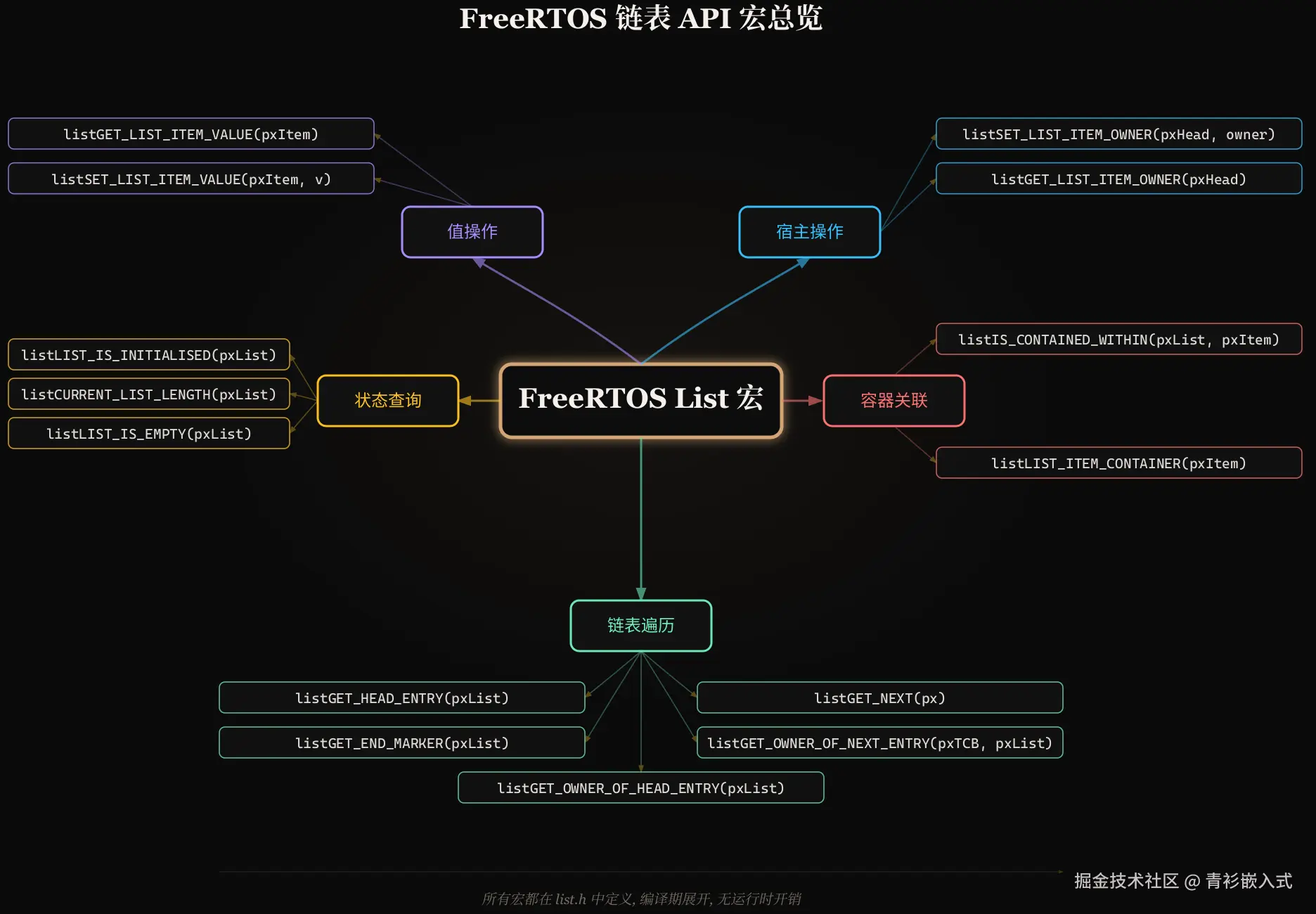
全部删除后 listLIST_IS_EMPTY: 是八、辅助宏与工具函数
以下宏虽短,但贯穿了整个 FreeRTOS 源码。
| 宏 | 功能 | 调度器中的典型用法 |
|---|---|---|
listSET_LIST_ITEM_VALUE |
设置节点的排序值 | 将延时任务的唤醒 tick 写入节点 |
listGET_LIST_ITEM_VALUE |
读取节点的排序值 | 比较任务优先级或唤醒时间 |
listSET_LIST_ITEM_OWNER |
设置节点的宿主指针 | 将 TCB 指针赋给节点 |
listGET_LIST_ITEM_OWNER |
获取节点的宿主指针 | 遍历就绪链表获取待运行任务 |
listGET_HEAD_ENTRY |
获取链表的第一个节点 | 获取最高优先级的就绪任务 |
listGET_END_MARKER |
获取链表的结尾标记 | 遍历时判断是否走到末尾 |
listGET_NEXT |
获取当前节点的下一个节点 | 遍历链表 |
listLIST_IS_EMPTY |
判断链表是否为空 | 检查就绪链表是否有任务 |
listCURRENT_LIST_LENGTH |
获取链表长度 | 调试/统计 |
listIS_CONTAINED_WITHIN |
判断节点是否在指定链表中 | 验证任务状态一致性 |
容器检查
listIS_CONTAINED_WITHIN 利用了节点中的 pxContainer 指针:
c
#define listIS_CONTAINED_WITHIN(pxList, pxListItem) \
((pxListItem)->pxContainer == (pxList)) ? pdTRUE : pdFALSE演示 5 运行输出:
ini
--- 演示5: listIS_CONTAINED_WITHIN (容器检查) ---
插入 listA: in A=是 in B=否
移除后: in A=否 pxContainer=NULL
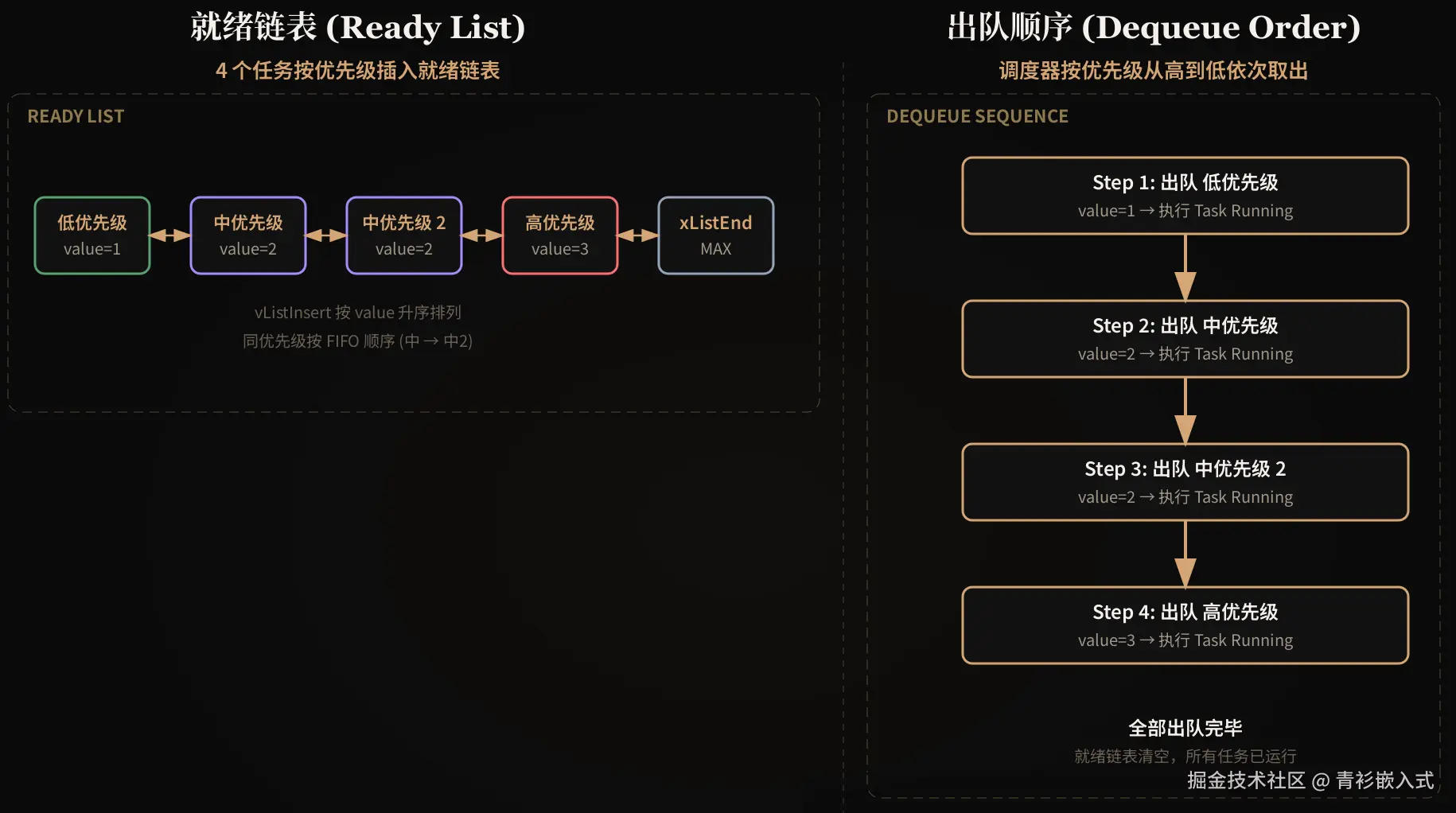
插入 listB: in B=是九、综合实战:模拟调度器就绪链表
演示 7 模拟了 FreeRTOS 调度器的核心行为------从就绪链表中按优先级取任务执行。
场景
4 个任务,优先级分别为:1(低)、2(中)、3(高)、2(中优先级2)
c
vListInsert(&readyList, &tasks[0].listItem); // 优先级 1
vListInsert(&readyList, &tasks[1].listItem); // 优先级 2
vListInsert(&readyList, &tasks[2].listItem); // 优先级 3
vListInsert(&readyList, &tasks[3].listItem); // 优先级 2就绪链表结构
运行输出:
ini
--- 演示7: 综合 -- 模拟调度器就绪链表 ---
4 个任务按优先级(1/2/3/2)插入就绪链表
vListInsert 按 value 升序排列
-- 就绪链表 (共 4 项)
[0] 低优先级 value=1
[1] 中优先级 value=2
[2] 中优先级2 value=2
[3] 高优先级 value=3
出队顺序 (升序,value 小先出):
出队: 低优先级 (value=1)
出队: 中优先级 (value=2)
出队: 中优先级2 (value=2)
出队: 高优先级 (value=3)
全部出队完毕与真实调度器的对应关系
| 演示中的元素 | 真实 FreeRTOS 调度器 |
|---|---|
DemoItem_t 嵌入 ListItem_t |
TCB_t 嵌入 ListItem_t(通过 xStateListItem、xEventListItem) |
xItemValue 存储优先级 |
就绪链表pxReadyTasksLists[pri] 中所有 TCB 的 xItemValue 相同 |
vListInsert 升序排列 |
同优先级任务按 FIFO 插入,实现时间片轮转 |
listGET_HEAD_ENTRY 取队首 |
selectHighestPriorityTask() 获取最高优先级队列的第一个 TCB |
uxListRemove 出队 |
任务被调度运行后从就绪链表移除 |
十、总结
FreeRTOS 的链表设计处处体现着嵌入式系统 RAM 极度受限下的工程智慧:
- 双向循环链表 ------ 任意节点插入/删除都是 O(1) 时间复杂度,确定性对 RTOS 至关重要。
MiniListItem_t作为结尾标记 ------ 省去 2 个指针(8 字节),避免为结尾标记分配完整的ListItem_t。pvOwner双向关联 ------ 链表节点 ↔ 宿主对象的"双向指针",遍历时能直接从节点拿到 TCB。pxContainer自包含删除 ------ 节点保存所属链表信息,uxListRemove不需要外部传入链表指针。- 排序插入 FIFO ------
<=比较条件保证同值节点的先入先出行为。
掌握 FreeRTOS 链表,就等于拿到了阅读整个 FreeRTOS 内核源码的钥匙。无论你是想理解任务调度、延时机制,还是软件定时器、事件组,底层的链表操作逻辑始终如一。
参考资料
- FreeRTOS Kernel V10.3.1 官方源码:
freertos/include/list.h、freertos/list.c - 本演示项目完整代码:
projects/02_list/app/main.c - 构建方式:
cmake -S . -B build -DCMAKE_TOOLCHAIN_FILE=cmake/arm-none-eabi.cmake -DBUILD_PROJECT=02_list && cmake --build build
如果你觉得这篇文章有帮助,欢迎转发分享。