1、V90 PN总线伺服通过FB285实现速度控制
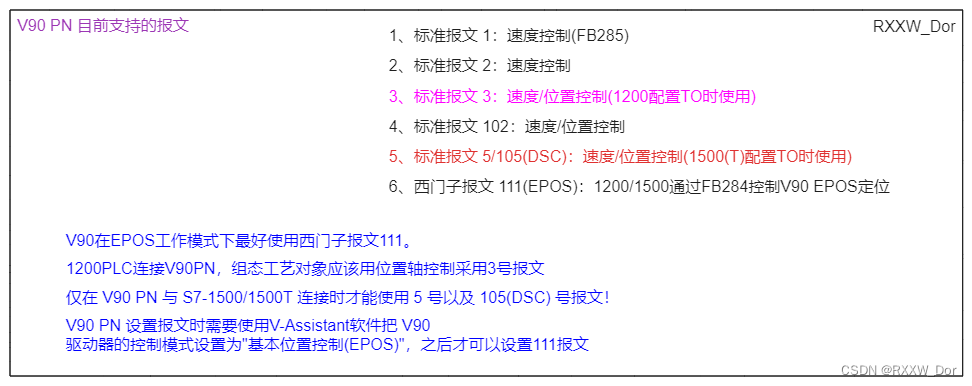
1、支持的标准报文
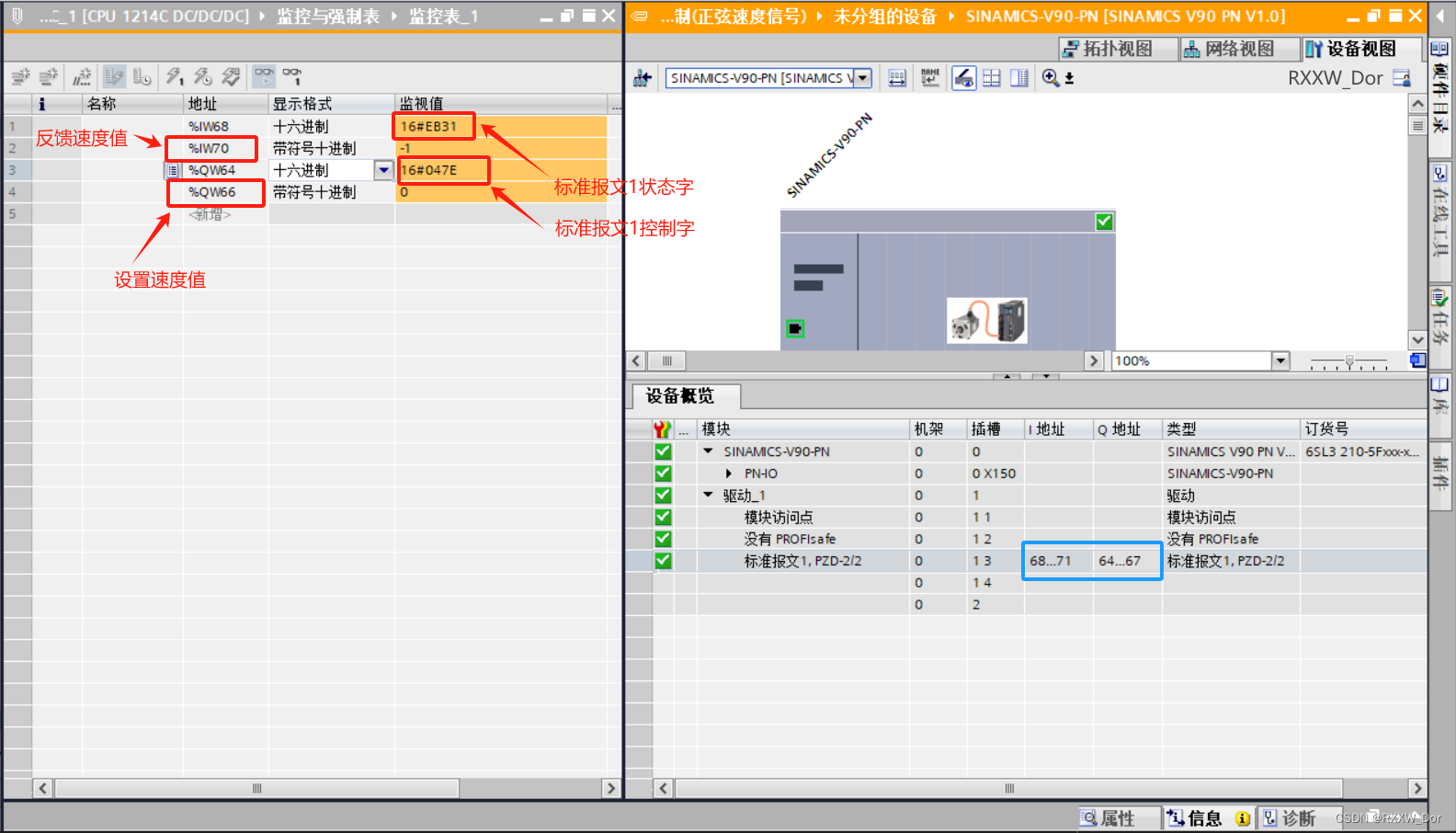
2、标准报文1监视
3、二进制监视
速度设定值要经过标准化,变频器接收十进制有符号整数 16384(4000H 十六进制)对应于 100%的速度,接收的最大速度为 32767(200%)。参数 P2000中设置 100%对应的参考转速。
待续...
1、V90 PN总线伺服通过FB285实现速度控制
速度设定值要经过标准化,变频器接收十进制有符号整数 16384(4000H 十六进制)对应于 100%的速度,接收的最大速度为 32767(200%)。参数 P2000中设置 100%对应的参考转速。
待续...