如果仿真跑通了。
真机遇到问题,可参考此文章。
ubuntu22 + px4 1.14.3 + ros2 humble
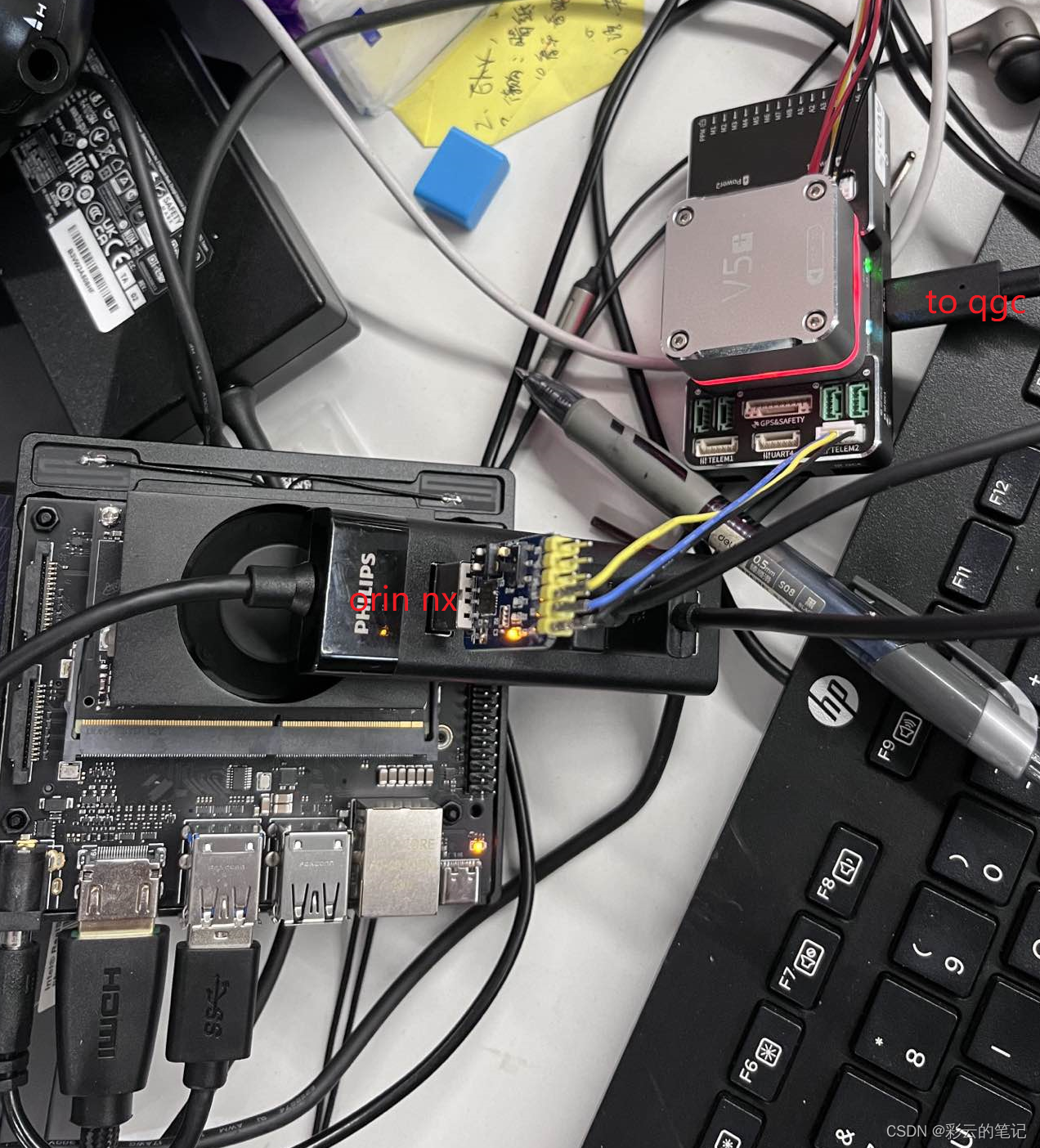
硬件接线。
先找两个usb - ttl串口,分别接到两台主机上,保证串口通信正常。
图中是个六合一的。浪费一天时间,发现是串口设置错误,无法通信。

qgc设置参数


如果不行,可以手动启动uxrce_dds_client
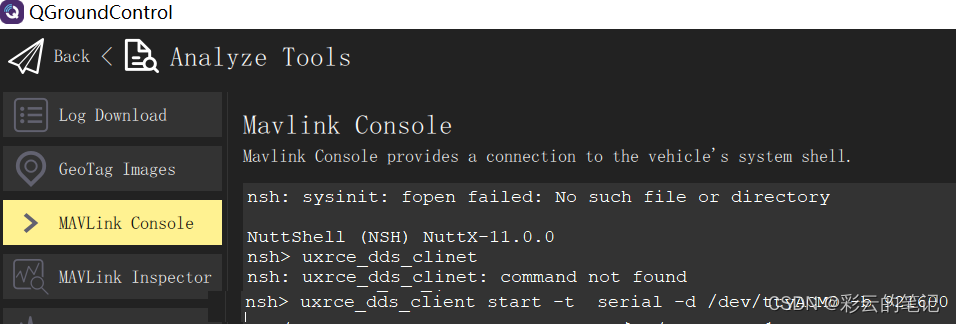
uxrce_dds_client stop
uxrce_dds_client status (Not Running)
uxrce_dds_client start -t serial -d /dev/ttyS2 -b 921600
For Pixhawk - Telem1 = S1. TELEM2=S2
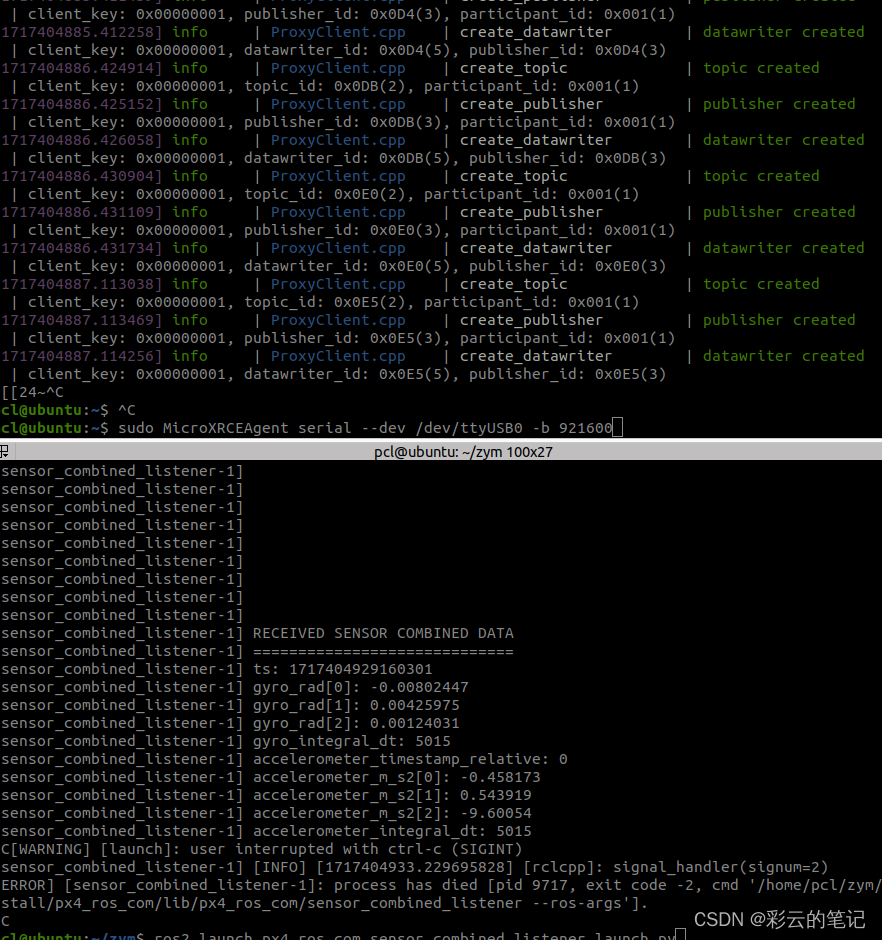
在Orin nx上看到类似下图,则成功了。