【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
既然lwip已经port到407上面了,接下来其实就可以做一些测试了。本身lwip支持tcp、udp,也支持client和server,既然我们选择了无os版本,那么功能上可以简单一点也行,这里我们就以udp server作为范例,看看407怎么和上位机配合进行测试。
1、测试代码逻辑
测试的逻辑不复杂,就是开发板上有两个按钮。按钮1按下去的时候,启动udp server;按钮2按下去的时候,结束udp server。其他报文处理逻辑没有发生改变。
while(1)
{
if(Key_Scan(KEY1_GPIO_PORT,KEY1_PIN)==KEY_ON&&(flag==0))
{
LED1_ON;
if (EthLinkStatus == 0)
{
printf("create udp server\n");
/* Initialize the server application */
udp_echoserver_init();
flag=1;
}
}
if(Key_Scan(KEY2_GPIO_PORT,KEY2_PIN)==KEY_ON&&(flag==1))
{
LED1_OFF;
udp_echoserver_Stop();
flag=0;
}
/* check if any packet received */
if (ETH_CheckFrameReceived())
{
/* process received ethernet packet */
LwIP_Pkt_Handle();
}
/* handle periodic timers for LwIP */
LwIP_Periodic_Handle(LocalTime);
}2、udp server的初始化
初始化比较简单,主要就是创建一个udp_pcb,把这个udp_pcb和对应的ip、port绑定在一起。如果没有问题,继续注册一个报文接收的回调函数。当然,如果出错的话,就删除这个udp_pcb。
void udp_echoserver_init(void)
{
err_t err;
/* Create a new UDP control block */
upcb = udp_new();
if (upcb)
{
/* Bind the upcb to the UDP_PORT port */
/* Using IP_ADDR_ANY allow the upcb to be used by any local interface */
err = udp_bind(upcb, IP_ADDR_ANY, UDP_SERVER_PORT);
if(err == ERR_OK)
{
/* Set a receive callback for the upcb */
udp_recv(upcb, udp_echoserver_receive_callback, NULL);
#ifdef SERIAL_DEBUG
printf("Start the server application\n");
#endif
}
else
{
udp_remove(upcb);
printf("can not bind pcb");
}
}
else
{
printf("can not create pcb");
}
}3、udp server的报文接收
如果有client端给udp server发送报文了,那么这个接收函数就会被调用到。毕竟,它也是在udp_echoserver_init函数中刚刚被注册上去的。首先,upcb会和client端的addr、port连接在一起,主要是为了发送报文用的。接着,打印一下接收到的内容。然后,把这些内容发送回去。最后,upcb会再次和addr、port分开。最后,收到的报文缓存p也会被释放掉。
原示例代码中的UDP_CLIENT_PORT要改成port。
void udp_echoserver_receive_callback(void *arg, struct udp_pcb *upcb, struct pbuf *p, struct ip_addr *addr, u16_t port)
{
char recdata[100]={0};
/* Connect to the remote client */
//udp_connect(upcb, addr, UDP_CLIENT_PORT);
udp_connect(upcb, addr, port);
#ifdef SERIAL_DEBUG
memcpy((char *)recdata,p->payload,p->len);
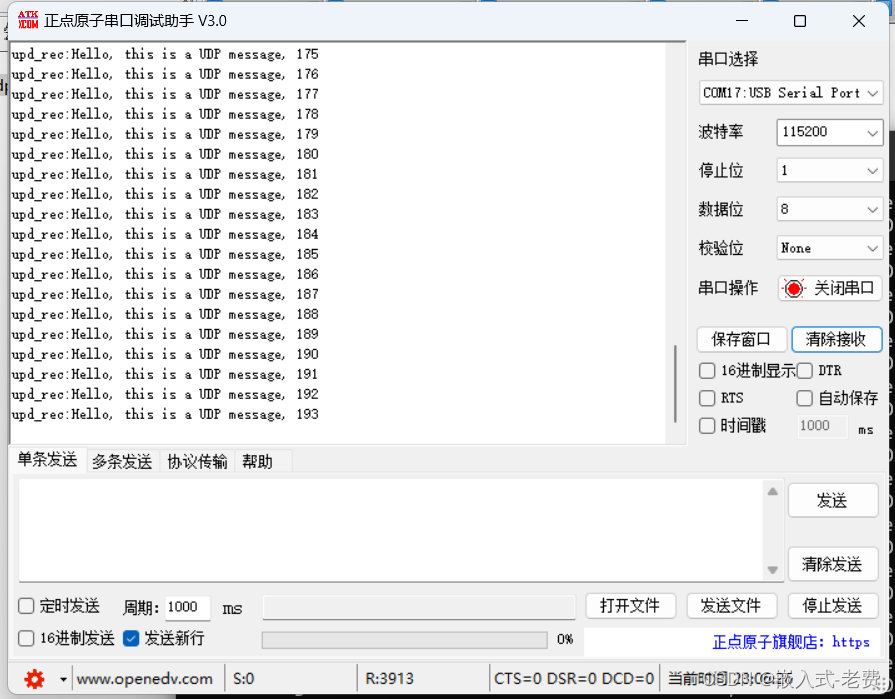
printf("upd_rec:%s\r\n",recdata);
#endif
/* Tell the client that we have accepted it */
udp_send(upcb, p);
/* free the UDP connection, so we can accept new clients */
udp_disconnect(upcb);
/* Free the p buffer */
pbuf_free(p);
}4、udp server的停止
相比较前两个函数,udp server的停止就简单很多。直接调用udp_remove即可。
void udp_echoserver_Stop(void)
{
#ifdef SERIAL_DEBUG
printf("Stop the server application\n");
#endif
udp_remove(upcb);
}5、pc客户端准备
因为407开发板上面是一个udp server端,所以pc这边也要写一个udp client端。本着简单、方便的原则,我们用python写了一个udp客户端。
#!/usr/bin/python
import socket
import time
def send_udp_message(host, port, message):
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
try:
sock.sendto(message.encode(), (host, port))
print(f"UDP message sent to {host}:{port}: {message}")
except Exception as e:
print(f"Error: {e}")
time.sleep(0.05)
response, server = sock.recvfrom(1024)
print(f"Response received from server: {response.decode('utf-8')}")
if __name__ == '__main__':
host = '192.168.0.122'
port = 5000
num = 0
message = "Hello, this is a UDP message, "
while True:
send_udp_message(host, port, message + str(num))
time.sleep(0.05)
num += 16、测试和验证
**按照之前的做法,需要把固件的ip改成192.168.0.122,网关改成192.168.0.1,pc的ip改成192.168.0.240。下面就是常规操作。**首先编译keil代码,烧录。接着复位启动,确认有打印,而且网口灯有闪烁。这个时候,按下按键1,在串口上确认udp server开启。后续的话,就可以用python启动udp client脚本。这样,开发板上的打印就是这样的,
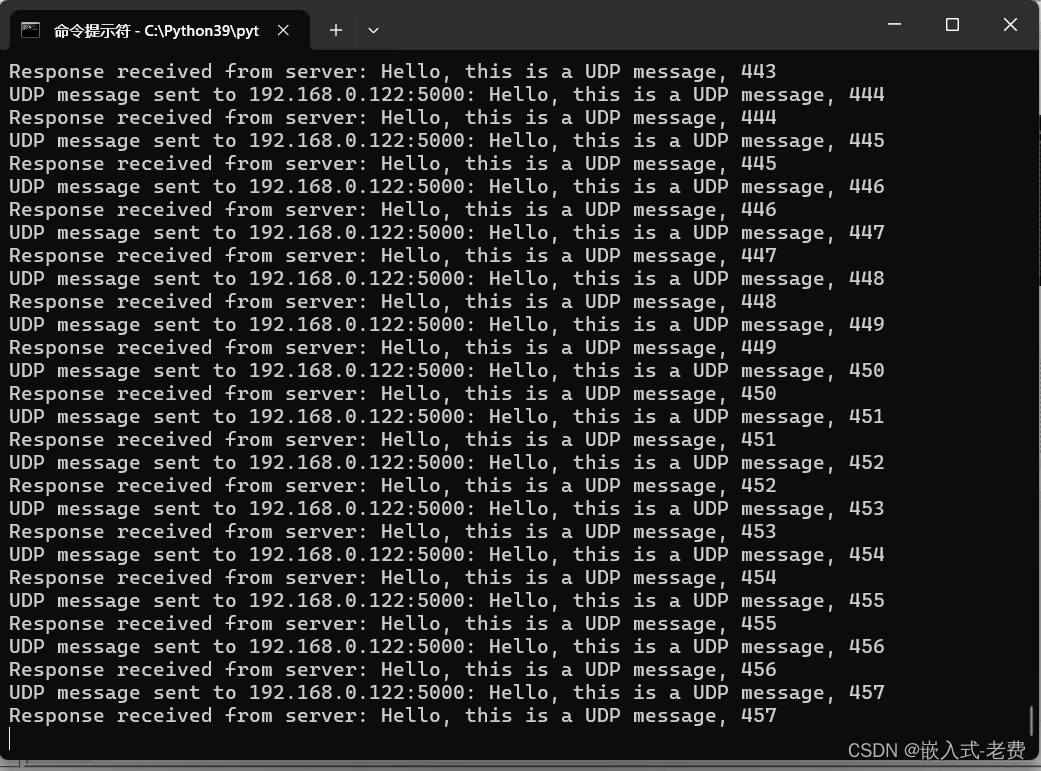
而pc侧的打印就是这样的,有兴趣的同学可以自己测试下。
当然这个时候,大家可以按下2,看看打印会不会停止。