数据集格式:Pascal VOC格式+YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)
图片数量(jpg文件个数):240
标注数量(xml文件个数):240
标注数量(txt文件个数):240
标注类别数:1
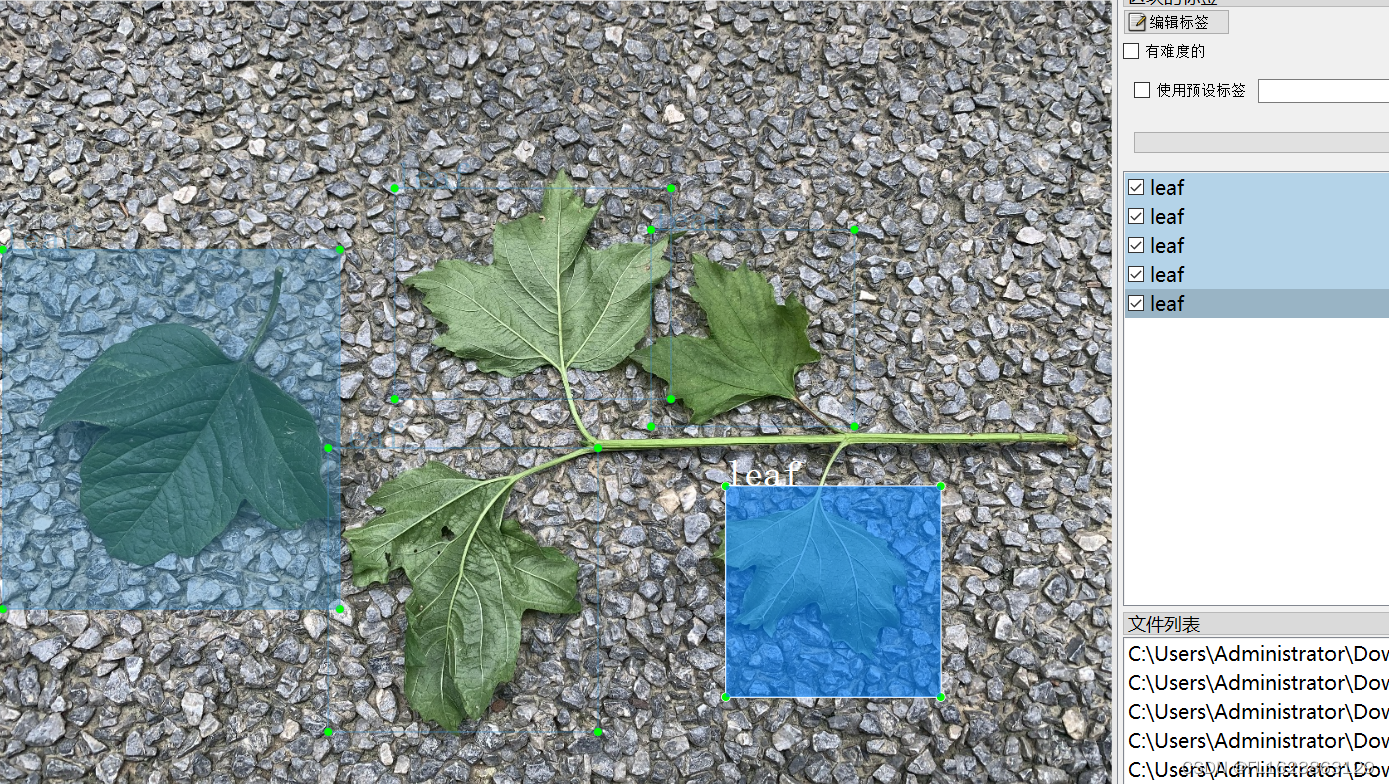
标注类别名称:"leaf"
每个类别标注的框数:
leaf 框数 = 3294
总框数:3294
使用标注工具:labelImg
标注规则:对类别进行画矩形框
重要说明:暂无
特别声明:本数据集不对训练的模型或者权重文件精度作任何保证,数据集只提供准确且合理标注
图片示例:
标注示例:
下载地址:https://download.csdn.net/download/FL1623863129/89400940