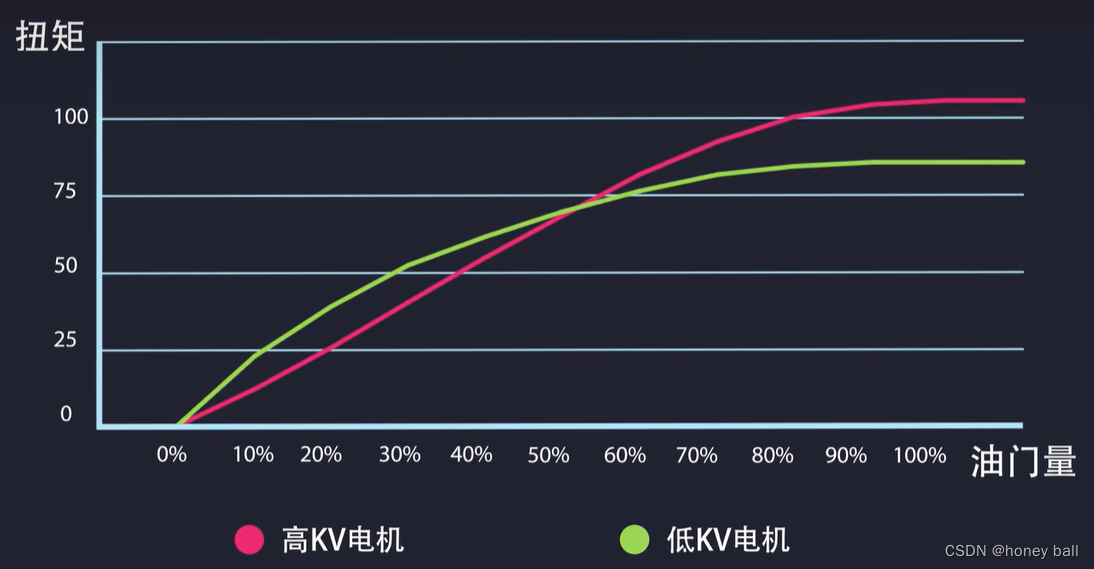
2306的意思是电机定子直径23MM,定子高度6MM.在相同KV值的情况下电机的定子体积越大,扭矩越大:KV的意思是每增加1V的电压电机转速增加多少。同参数的电机KV越低,在低速的情况下能带动更大的质量。这也就解释了竞速机选用更高KV值的电机。低KV值的电机的续航比高KV值的高一些:

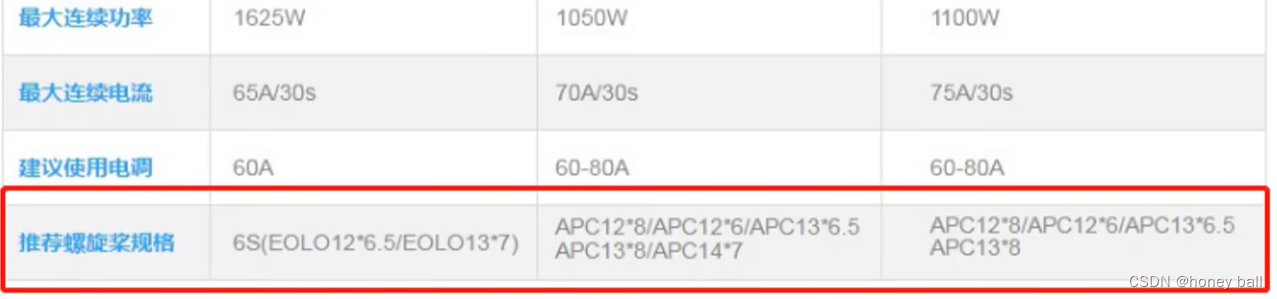
选型电机的时候要关注电机的工作电压和电流范围:

注意电流应参考油门电100%的电流,防止电流过大烧坏电调。除此之外要关注的是电机的拉力,电机油门点百分之40的时候应提供 无人机整机质量(包含电机质量) / 提供升力的电机数量


电池电流必须大于4个电机所需要的总电流:

航模锂电池提供的最大电流为容量 X 放电倍率 = 最大放电电流

大桨叶适配低KV值的电机(扭矩更大),小桨叶适配高KV值的电机(扭矩更小)

电调选型时候主要关注支持电压和电流:

四旋翼四个电机有固定的旋转方向,以斜对角线为一组,整个无人机桨叶分为两组(正桨和反桨):

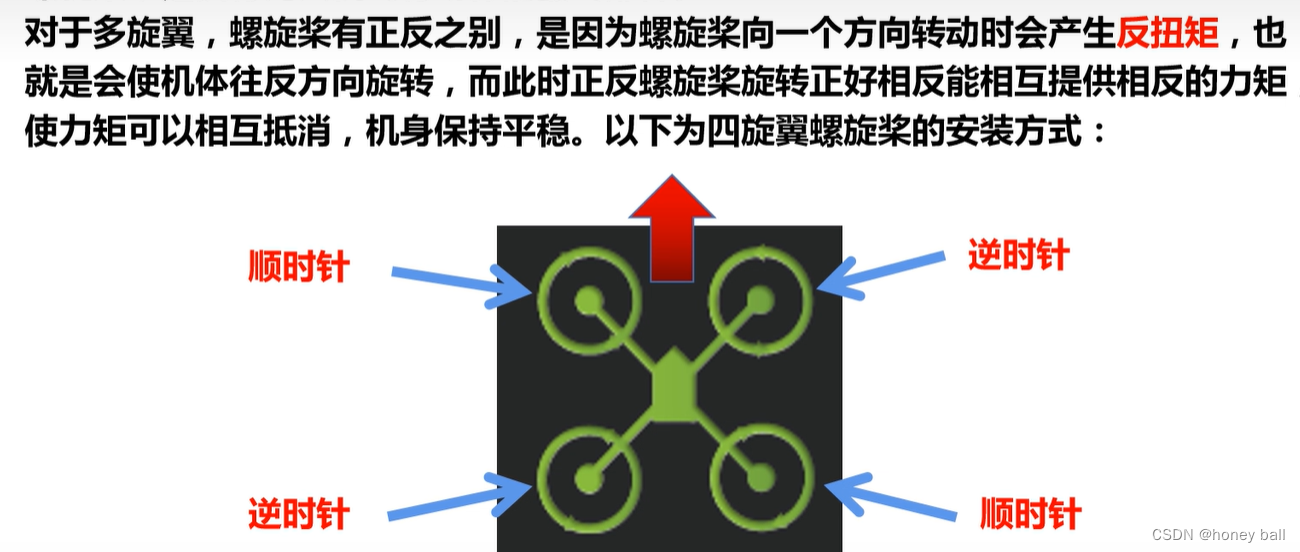

桨叶上面写的是R的都是反桨,写的是P或者E的都是正桨:

在选择电机时候商家一般标注了推荐使用的桨叶型号:
在3,4寸小飞机上电机倒置可以减小四个机臂带来的效率损耗,在更大尺寸的飞机上倒置与正置几乎没有区别:


//
舵机的参数选型:
【舵机怎么选?参数表怎么看?5分钟快速看懂!】https://www.bilibili.com/video/BV1Ft421M7jo?vd_source=3cc3c07b09206097d0d8b0aefdf07958