文章目录
- [0 效果](#0 效果)
- [1 原理](#1 原理)
-
- [1.1 图片旋转](#1.1 图片旋转)
- [1.2 物体带速度移动](#1.2 物体带速度移动)
- [2 完整实现](#2 完整实现)
-
- [2.1 将车辆按钮封装为一个类:](#2.1 将车辆按钮封装为一个类:)
- [2.2 调用方法](#2.2 调用方法)
- [3 完整代码](#3 完整代码)
- 参考
0 效果
实现后的效果如下
可以显示属性(继承自QToolButton):

鼠标悬浮显示文字
按钮显示文字
1 原理
类继承自QToolButton,默认朝右行驶为正方向,设置图片为按钮的图标:
1.1 图片旋转
- 1,如果水平移动,朝左移动(纵坐标差值为0,横坐标差值为负【终点-起点,后面计算方式相同】),则对图片进行镜像处理
image.mirrored;
cpp
QImage rotateImage(const QImage &image, qreal fAngle)
{
QTransform transform;
transform.rotate(fAngle);
return image.transformed(transform, Qt::SmoothTransformation);
}
QImage tmp;
if(r_x == 0 ) //Y轴
{
if(r_y > 0)
{
tmp = rotateImage(m_image,90.0);
}
else
{
tmp = rotateImage(m_image,270.0);
}
}
朝右
朝左
- 2,如果是垂直移动,朝下移动(水平坐标差值为0,纵坐标差值大于0),把图片顺时针旋转90度;朝上移动(水平坐标差值为0,纵坐标差值小于0),图片顺指针旋转270度(对图片使用镜像
image.transformed处理);
cpp
QImage filp(const QImage &image, bool bIsHorizon)
{
return image.mirrored(bIsHorizon,!bIsHorizon);
}
else if(r_y == 0) //X轴
{
if(r_x >0)
{
tmp = m_image;
}
else
{
tmp = filp(m_image,true);
}
}
朝下

朝上
- 3,如果是倾斜移动,计算弧度(纵坐标的差和横坐标的差的比值(tan值)取反正切值(
qAtan(r_y/r_x));),把弧度转为角度(qAtan(r_y/r_x)*180/PI;)【二、三象限的旋转角度为负数】;如果方向位于第2,3象限(因为x轴正向,为水平朝右,y轴正向,为垂直向下),则把车图片做镜像处理(image.transformed处理,把车头调为朝左);
cpp
//核心
QImage _filp = filp(m_image,true);
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(_filp,k);下面为四个象限的情况:
cpp
else if(r_x > 0 && r_y > 0) //第一象限
{
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(m_image,k);
qDebug()<<"第一象限:"<<k;
}
else if(r_x < 0 && r_y > 0) //第二象限
{
QImage _filp = filp(m_image,true);
qreal k = qAtan(r_y/r_x)*180/PI;
qDebug()<<"第二象限:"<<k;
tmp = rotateImage(_filp,360.0 + k);//顺时针旋转
//tmp = rotateImage(_filp, k);//逆时针旋转
}else if(r_x < 0 && r_y < 0) //第三象限
{
QImage _filp = filp(m_image,true);
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(_filp,k);
qDebug()<<"第三象限:"<<k;
}
else if(r_x > 0 && r_y < 0) //第四象限
{
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(m_image,360.0+k);
//tmp = rotateImage(m_image, k);
qDebug()<<"第四象限:"<<k;
}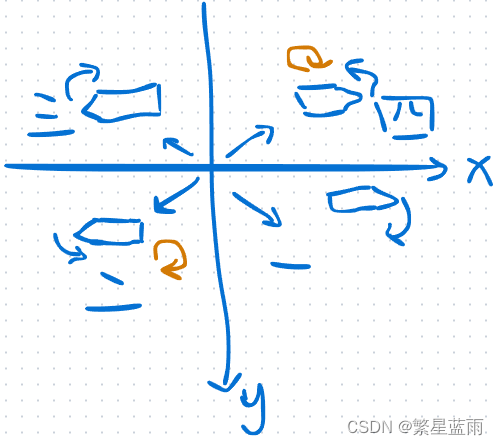
四个象限

左上(位于第三象限)

右上(位于第四象限)

右下(位于第一象限)
左下(位于第二象限)
1.2 物体带速度移动
前提:
- 1,使用
QTimer计时器,进行刷新,来更新物体位置;- 2,传入每个线段路径的起点和终点到向量(Vector)构成总路线;
- 3, 使用
move方法来进行物体移动;
算法:
- 1,根据总路线,依次计算出两点间的距离(两点间距离公式),累加后构成图形中的总距离
m_linedistance;
cpp
for(int i = 1;i< m_pointVector.size();i++)
{
m_linedistanceVector.push_back(qSqrt((m_pointVector[i].x() - m_pointVector[i-1].x())*(m_pointVector[i].x() - m_pointVector[i-1].x())+
(m_pointVector[i].y() - m_pointVector[i-1].y())*(m_pointVector[i].y() - m_pointVector[i-1].y())));
m_linedistance += m_linedistanceVector.back();
}- 2,计算出图形中单次刷新的实际移动的距离(像素):
- 使用图形中的总距离
m_linedistance(单位:像素)除以 输入的距离m_distance(单位:m),得到图形中1像素代表实际距离中多少米; - 使用速度
m_speed(单位:m/s)乘以 时间time(单位:s,为QTimer的刷新时间)得到目前移动的像素;
- 使用图形中的总距离
cpp
qreal move_line = (time * m_speed)*m_linedistance/m_distance;- 3,计算出坐标的变化:
- 计算方法:用上一步算出的实际移动的距离除以 起点和终点两点间的距离得到移动的比列,起点的横、纵坐标分别加上比列乘以横、纵坐标的起终点之差,得到下一次移动后的坐标位置;
cpp
QPoint p;
qreal t = qSqrt((end.x() - start.x())*(end.x() - start.x()) + (end.y() - start.y())*(end.y() - start.y()));
p.setX((end.x() - start.x())*distance/t + start.x());
p.setY((end.y() - start.y())*distance/t + start.y());
-
- 更换线路:如果当前点移动的距离和超过起点和终点间的距离差(也就是换到下一段线路上,且不是终点时),下一段线路的应该移动的距离减去当前点移动后超过的距离值(为了使得最终用时无误)为实际移动距离;
cpp
if(m_linedistanceVector[m_curposindex] <= m_curlinedistance + move_line)//超越该点
{
qDebug()<<"换点的距离:"<<"m_curlinedistance:"<<m_curlinedistance<<" m_linedistanceVector[m_curposindex]: "<<m_linedistanceVector[m_curposindex];
//下一个点移动的距离 - 上一点移动的还未移动完的距离:为了使驾驶的时间正确
m_curlinedistance = m_curlinedistance + move_line - m_linedistanceVector[m_curposindex];
m_curposindex++;
if(m_curposindex == m_pointVector.size() - 1)//当前点在终点
{
m_curlinedistance = 0;
m_curposx = m_pointVector.back().x();
m_curposy = m_pointVector.back().y();
}
else
{
QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex+1]);
m_curposx = pt.x();
m_curposy = pt.y();
//旋转图标位置
setImageRote(m_pointVector[m_curposindex].x(), m_pointVector[m_curposindex].y(), m_pointVector[m_curposindex+1].x(), m_pointVector[m_curposindex+1].y());
}
}- 4,终止:如果该点为最后一个点,则车辆停止(停止定时器刷新);
cpp
class xx{
//计时器
QTimer m_timer;
};
if(m_curposindex == m_pointVector.size() -1){//只剩最后一个坐标时,停止计时器(停车)
m_timer.stop();
}2 完整实现
2.1 将车辆按钮封装为一个类:
cpp
#ifndef VEHICLE_TOOLBUTTON_H
#define VEHICLE_TOOLBUTTON_H
#include <QToolButton>
#include <QTimer>
class VehicleToolButton : public QToolButton
{
Q_OBJECT
public:
/**
* @brief 使用默认图片
* @param parent
*/
VehicleToolButton(QWidget *parent = nullptr);
/**
* @brief VehicleToolButton
* @param image:按钮的图标的文件路径
* @param size:按钮大小
* @param parent
*/
VehicleToolButton(QString imagePath, QSize size,QWidget *parent = nullptr);
~VehicleToolButton();
public:
/**
* @brief 得到速度
* @return
*/
qreal getSpeed();
/**
* @brief 强制设置显示位置
* @param x
* @param y
*/
void setCurCoordinate(int x,int y);
/**
* @brief 设置现在所处位置
* @param x
* @param y
*/
void setCurrentPosition(int x, int y);
/**
* @brief 改变速度
* @param _speed
*/
void setSpeed(qreal _speed);
/**
* @brief 设置行进参数
* @param _v_point
* @param _distance
* @param _speed
*/
void setData(QVector<QPoint> _v_point, qreal _distance, qreal _speed);
/**
* @brief 设置图标图片
* @param image
*/
void setImage(QImage image);
/**
* @brief 设置图标大小
* @param size
*/
void setSize(QSize size);
private:
/**
* @brief 计算从起点到终点方向距离distance的坐标点
* @param distance
* @param start
* @param end
* @return
*/
QPoint getPoswithLinedistance(qreal distance,QPoint start,QPoint end);
/**
* @brief 按水平轴或者垂直线作镜像翻转,bIsHorizon为true按水平轴,false按垂直方向
* @param image
* @param bIsHorizon
* @return
*/
QImage filp(const QImage& image,bool bIsHorizon);
/**
* @brief 根据弧度值(角度值)起点(x1,y1)和终点(x2,y2)确定图片旋转的角度
* @param x1
* @param y1
* @param x2
* @param y2
*/
void setImageRote(int x1,int y1,int x2,int y2);
/**
* @brief 将图片按顺时针方向旋转一定的角度,fAngle为角度值
* @param image
* @param fAngle
* @return
*/
QImage rotateImage(const QImage& image,qreal fAngle);
/**
* @brief 根据弧度值(角度值)r_x,r_y确定图片旋转的角度
* @param r_x
* @param r_y
*/
void setImageRote(qreal r_x,qreal r_y);
/**
* @brief //根据车速和运动轨迹计算time时间之后位置,timer事件调用move()函数移动到该位置,
* @param time
* @param x
* @param y
*/
void getCurrentPos(qreal time,int& x,int& y);
public slots:
/**
* @brief 刷新图片
*/
void updatedisplay();
/**
* @brief 开始定时器
* @param _msec
*/
void startTimer(int _msec);
private:
QImage m_image;//按钮图标
QSize m_pixSize;//按钮大小
//车辆行进数据结构
QVector<QPoint> m_pointVector; //行驶路径点集合(图上位置)
QVector<qreal> m_linedistanceVector; //行驶路径段在图上的线段长度
qreal m_distance; //行驶路径总长度(单位m)
qreal m_linedistance; //行驶路径在图上的总长度
int m_curposindex; //当前所在点的下标
qreal m_curlinedistance; //当前所在线段上距离
qreal m_curlinetotledistance; //当前行驶完成的路径长度总和
int m_curposx; //当前在图上的点X坐标
int m_curposy; //当前在图上的点Y坐标
qreal m_speed; //当前车速
//设置刷新时间(毫秒)
int m_refreshTime = 10;
//计时器
QTimer m_timer;
signals:
/**
* @brief 停止移动
*/
void stopVehicleMove();
};
#endif // VEHICLE_TOOLBUTTON_H
cpp
#include "vehicle_toolbutton.h"
#include <qmath.h>
#include <QDebug>
#define PI 3.1415926
VehicleToolButton::VehicleToolButton(QWidget *parent) : QToolButton(parent){
//设置按钮大小
this->setFixedSize(50, 50);
//设置图标大小
this->setIconSize(QSize(50,50));
this->setAutoRaise(true);//设置按钮自动凸起
this->setToolButtonStyle(Qt::ToolButtonTextUnderIcon);
QPixmap icoPix(":/Image/car.png");
//QPixmap icoPix = QPixmap::fromImage(l_image);
icoPix.scaled(QSize(50,50), Qt::IgnoreAspectRatio, Qt::SmoothTransformation);
m_image = icoPix.toImage();
m_pixSize = QSize(50,50);
this->setIcon(QIcon(icoPix));
}
VehicleToolButton::VehicleToolButton(QString imagePath, QSize size, QWidget *parent)
:QToolButton(parent), m_pixSize(size)
{
m_image.load(imagePath);
//设置按钮大小
this->setFixedSize(size.width(), size.height());
//设置图标大小
this->setIconSize(size);
this->setAutoRaise(true);//设置按钮自动凸起
this->setToolButtonStyle(Qt::ToolButtonTextUnderIcon);
QPixmap icoPix = QPixmap::fromImage(m_image);
icoPix.scaled(size, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);
m_image = icoPix.toImage();
this->setIcon(QIcon(icoPix));
}
VehicleToolButton::~VehicleToolButton()
{
}
void VehicleToolButton::updatedisplay()
{
int x=0, y=0;
getCurrentPos(m_refreshTime*0.001, x, y);//得到现在的坐标
this->move(x, y);//移动
if(m_curposindex == m_pointVector.size() -1){//只剩最后一个坐标时,停止计时器(停车)
//emit stopVehicleMove();
m_timer.stop();
}
}
void VehicleToolButton::startTimer(int _msec)
{
m_refreshTime = _msec;
//关联计时器
//connect(&m_timer, &QTimer::timeout, this, &VehicleToolButton::updatedisplay);
//关联计时器
connect(&m_timer, &QTimer::timeout, this, &VehicleToolButton::updatedisplay, Qt::UniqueConnection);
m_timer.start(_msec);
}
qreal VehicleToolButton::getSpeed()
{
return m_speed;
}
//根据车速和运动轨迹计算time时间之后位置,timer事件调用move()函数移动到该位置
void VehicleToolButton::getCurrentPos(qreal time, int &x, int &y)
{
if(m_linedistance <=0 )//所有点之间的距离为0
return;
//time = 刷新时间(单位为s)
//time * m_speed:得到图形中点的距离长度
//m_linedistance/m_distance:图形中的距离和设置距离的比列(图形中的距离1像素对应设置的实际距离?米)
qreal move_line = (time * m_speed)*m_linedistance/m_distance;
if(m_curposindex == m_pointVector.size()-1)//当前点在终点
{
}
else
{
if(m_linedistanceVector[m_curposindex] <= m_curlinedistance + move_line)//超越该点
{
//下一个点移动的距离 - 上一点移动的还未移动完的距离:为了使驾驶的时间正确
m_curlinedistance = m_curlinedistance + move_line - m_linedistanceVector[m_curposindex];
m_curposindex++;
if(m_curposindex == m_pointVector.size() - 1)//当前点在终点
{
m_curlinedistance = 0;
m_curposx = m_pointVector.back().x();
m_curposy = m_pointVector.back().y();
}
else
{
QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex+1]);
m_curposx = pt.x();
m_curposy = pt.y();
//旋转图标位置
setImageRote(m_pointVector[m_curposindex].x(), m_pointVector[m_curposindex].y(), m_pointVector[m_curposindex+1].x(), m_pointVector[m_curposindex+1].y());
}
}
else
{
m_curlinedistance += move_line;
QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex + 1]);
m_curposx = pt.x();
m_curposy = pt.y();
}
m_curlinetotledistance += move_line;
}
x = m_curposx;
y = m_curposy;
}
void VehicleToolButton::setCurCoordinate(int x, int y)
{
m_curposx = x;
m_curposy = y;
}
void VehicleToolButton::setCurrentPosition(int x, int y)
{
this->move(x,y);
}
void VehicleToolButton::setSpeed(qreal _speed)
{
m_speed = _speed;
}
//设置行进参数
void VehicleToolButton::setData(QVector<QPoint> _v_point, qreal _distance, qreal _speed)
{
m_pointVector.clear();
m_linedistanceVector.clear();
m_pointVector = _v_point;
m_distance = _distance;
m_speed = _speed;
m_linedistance = 0;//距离总长度
m_curposindex = -1;
m_curposx = -1;
m_curposy = -1;
m_curlinetotledistance = 0;
//计算两点间的距离长度
for(int i = 1;i< m_pointVector.size();i++)
{
m_linedistanceVector.push_back(qSqrt((m_pointVector[i].x() - m_pointVector[i-1].x())*(m_pointVector[i].x() - m_pointVector[i-1].x())+
(m_pointVector[i].y() - m_pointVector[i-1].y())*(m_pointVector[i].y() - m_pointVector[i-1].y())));
m_linedistance += m_linedistanceVector.back();
}
//位置坐标大于2个,设置最开始的坐标为起始位置,并旋转图片
if(m_pointVector.size() > 0 )
{
m_curposindex = 0;
m_curlinedistance = 0;
m_curposx = m_pointVector[0].x();
m_curposy = m_pointVector[0].y();
if(m_pointVector.size() >1)
setImageRote(m_pointVector[0].x(), m_pointVector[0].y(), m_pointVector[1].x(), m_pointVector[1].y());
}
}
void VehicleToolButton::setImage(QImage image)
{
m_image = image;
}
void VehicleToolButton::setSize(QSize size)
{
m_pixSize = size;
}
//计算从起点到终点方向距离distance的坐标点
QPoint VehicleToolButton::getPoswithLinedistance(qreal distance, QPoint start, QPoint end)
{
QPoint p;
qreal t = qSqrt((end.x() - start.x())*(end.x() - start.x()) + (end.y() - start.y())*(end.y() - start.y()));
p.setX((end.x() - start.x())*distance/t + start.x());
p.setY((end.y() - start.y())*distance/t + start.y());
return p;
}
//按水平轴或者垂直线作镜像翻转,bIsHorizon为true按垂直方向,false按水平轴
QImage VehicleToolButton::filp(const QImage &image, bool bIsHorizon)
{
return image.mirrored(bIsHorizon,!bIsHorizon);
}
//根据弧度值(角度值)起点(x1,y1)和终点(x2,y2)确定图片旋转的角度
void VehicleToolButton::setImageRote(int x1, int y1, int x2, int y2)
{
setImageRote(qreal(x2-x1),qreal(y2-y1));
}
//将图片按顺时针方向旋转一定的角度,fAngle为角度值
QImage VehicleToolButton::rotateImage(const QImage &image, qreal fAngle)
{
// QMatrix matrix;
// matrix.rotate(fAngle);
// return image.transformed(matrix, Qt::SmoothTransformation);
QTransform transform;
transform.rotate(fAngle);
return image.transformed(transform, Qt::SmoothTransformation);
}
//根据弧度值(角度值)r_x,r_y确定图片旋转的角度(核心算法)
void VehicleToolButton::setImageRote(qreal r_x, qreal r_y)
{
//坐标和理论坐标轴不同,X轴正向为水平右,Y轴正向为垂直向下
QImage tmp;
if(r_x == 0 && r_y == 0)
return;
if(r_x == 0 ) //Y轴
{
if(r_y > 0)
{
tmp = rotateImage(m_image,90.0);
}
else
{
tmp = rotateImage(m_image,270.0);
}
}
else if(r_y == 0) //X轴
{
if(r_x >0)
{
tmp = m_image;
}
else
{
tmp = filp(m_image,true);
}
}
else if(r_x > 0 && r_y > 0) //第一象限
{
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(m_image,k);
qDebug()<<"第一象限:"<<k;
}
else if(r_x < 0 && r_y > 0) //第二象限
{
QImage _filp = filp(m_image,true);
qreal k = qAtan(r_y/r_x)*180/PI;
qDebug()<<"第二象限:"<<k;
tmp = rotateImage(_filp,360.0 + k);//顺时针旋转
//tmp = rotateImage(_filp, k);//逆时针旋转
}else if(r_x < 0 && r_y < 0) //第三象限
{
QImage _filp = filp(m_image,true);
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(_filp,k);
qDebug()<<"第三象限:"<<k;
}
else if(r_x > 0 && r_y < 0) //第四象限
{
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(m_image,360.0+k);
//tmp = rotateImage(m_image, k);
qDebug()<<"第四象限:"<<k;
}
tmp.scaled(this->width(), this->height());
QPixmap icoPix = QPixmap::fromImage(tmp);
icoPix.scaled(this->size(), Qt::IgnoreAspectRatio, Qt::SmoothTransformation);
this->setIcon(QIcon(icoPix));
}2.2 调用方法
cpp
class MainInterface : public QMainWindow
{
Q_OBJECT
public:
MainInterface(QWidget *parent = nullptr);
~MainInterface();
private:
Ui::MainInterface *ui;
private:
VehicleToolButton* train;
QVector<QPoint> m_trainMovePointVector;
signals:
void startTrainMove(int msec=10);
private slots:
void on_pushButton_clicked();
};
MainInterface::MainInterface(QWidget *parent)
: QMainWindow(parent)
, ui(new Ui::MainInterface)
{
ui->setupUi(this);
QPixmap icoPix(":/Image/routeBackimage.png");
icoPix.scaled(ui->label->size(), Qt::IgnoreAspectRatio, Qt::SmoothTransformation);
ui->label->setScaledContents(true);
ui->label->setPixmap(icoPix);
//构造方法1
// train = new VehicleToolButton(this);
//构造方法2
train = new VehicleToolButton(QString(":/Image/car.png"), QSize(50,50),this);
//目标点,路径长度,速度
train->setData(m_trainMovePointVector, 500.0, 20.0);
train->hide();
train->setText("车:112");
train->setToolTip(QString("当前速度为:%1").arg(train->getSpeed()));
connect(this, &MainInterface::startTrainMove, train, &VehicleToolButton::startTimer);
// ui->label->hide();
}
//按钮点击事件
void MainInterface::on_pushButton_clicked()
{
// QVector<QPoint> v_point;
train->show();
m_trainMovePointVector.clear();
m_trainMovePointVector.push_back(QPoint(100,100));
m_trainMovePointVector.push_back(QPoint(400,400));//对角线右下
m_trainMovePointVector.push_back(QPoint(100,100));//对角线左上
m_trainMovePointVector.push_back(QPoint(100,400));//向下开
m_trainMovePointVector.push_back(QPoint(400,100));//对角线右上
m_trainMovePointVector.push_back(QPoint(100,400));//对角线左下
m_trainMovePointVector.push_back(QPoint(400,400));//向右开
m_trainMovePointVector.push_back(QPoint(400,100));//向上开
m_trainMovePointVector.push_back(QPoint(100,100));//向左开
// m_trainMovePointVector.clear();
// m_trainMovePointVector.push_back(QPoint(10, 822));
// m_trainMovePointVector.push_back(QPoint(1200, 822));
// m_trainMovePointVector.push_back(QPoint(10, 822));
train->setData(m_trainMovePointVector, 300.0, 20.0);
emit startTrainMove();
}3 完整代码
代码仓库(欢迎star):