顶顶通呼叫中心中间件-限制最大通话时间(mod_cti基于FreeSWITCH)
一、最大通话时间
1、配置拨号方案
1、点击拨号方案 ->2、在框中输入通话最大时长->3、点击添加->4、根据图中配置->5、勾选continue。修改拨号方案需要等待一分钟即可生效
bash
action="sched_hangup" data="+10 ALLOTTED_TIMEOUT"
web-ccadmin配置方法
1、点击拨号方案->2、在框中输入通话最大时长->3、点击添加->4、根据图中配置->5、勾选continue。修改拨号方案需要等待一分钟即可生效
bash
action="sched_hangup" data="+10 ALLOTTED_TIMEOUT"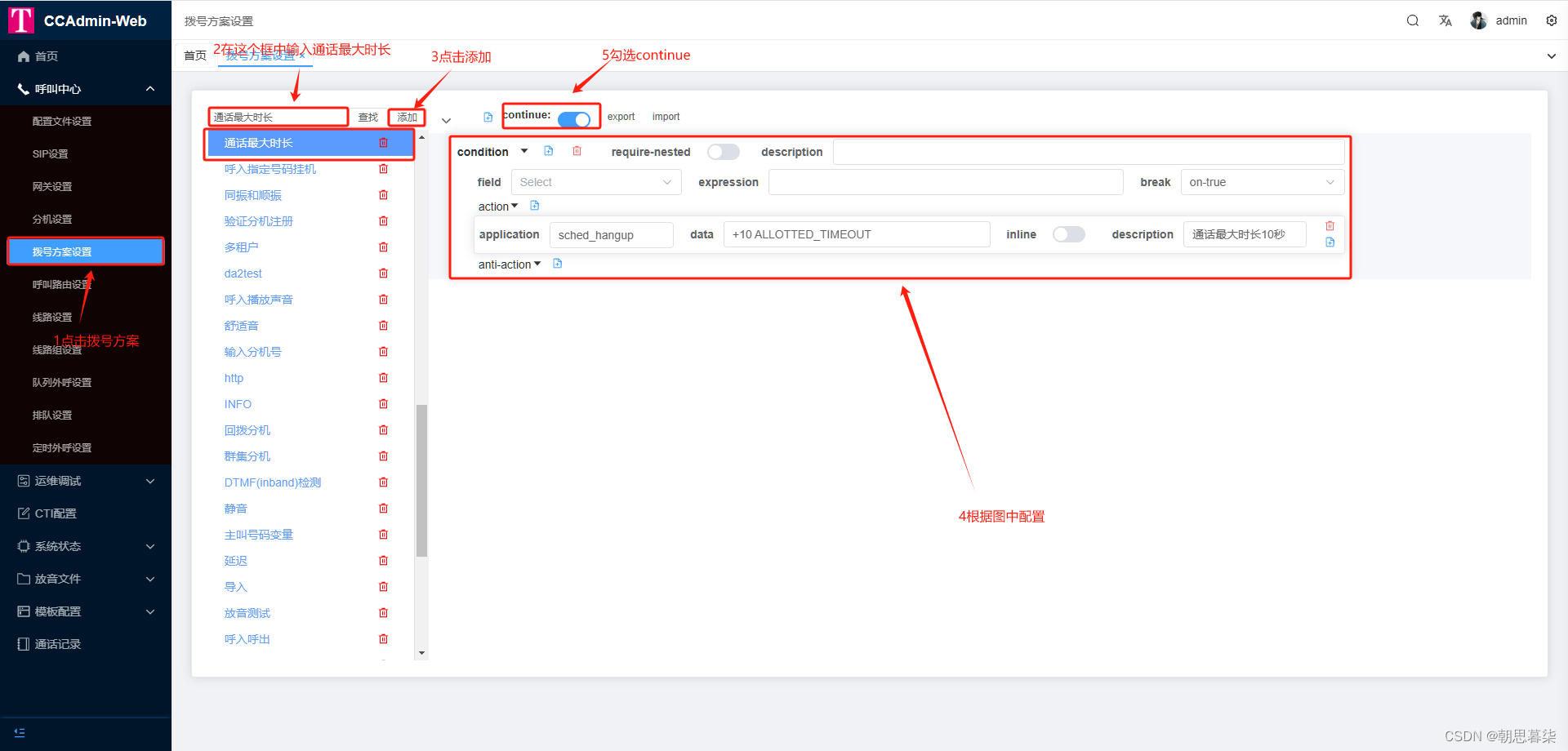
2、配置呼叫路由
如果是呼入就在external 哪里启用,如果是转坐席就在acd路由启用并且需要在进入排队之前,如果是你机器人就在robot启用并且需要在话术之前即可。 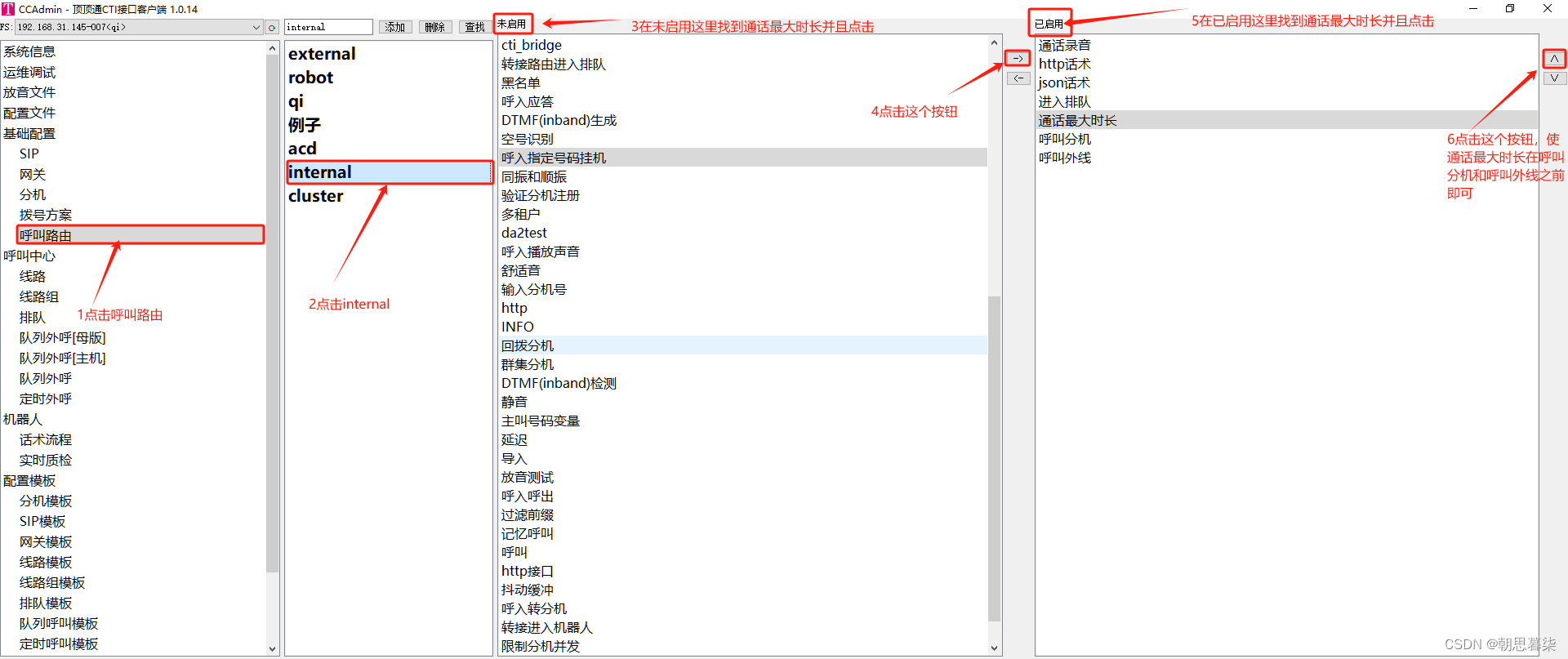
web-ccadmin配置方法  二、机器人最大通话时间
二、机器人最大通话时间
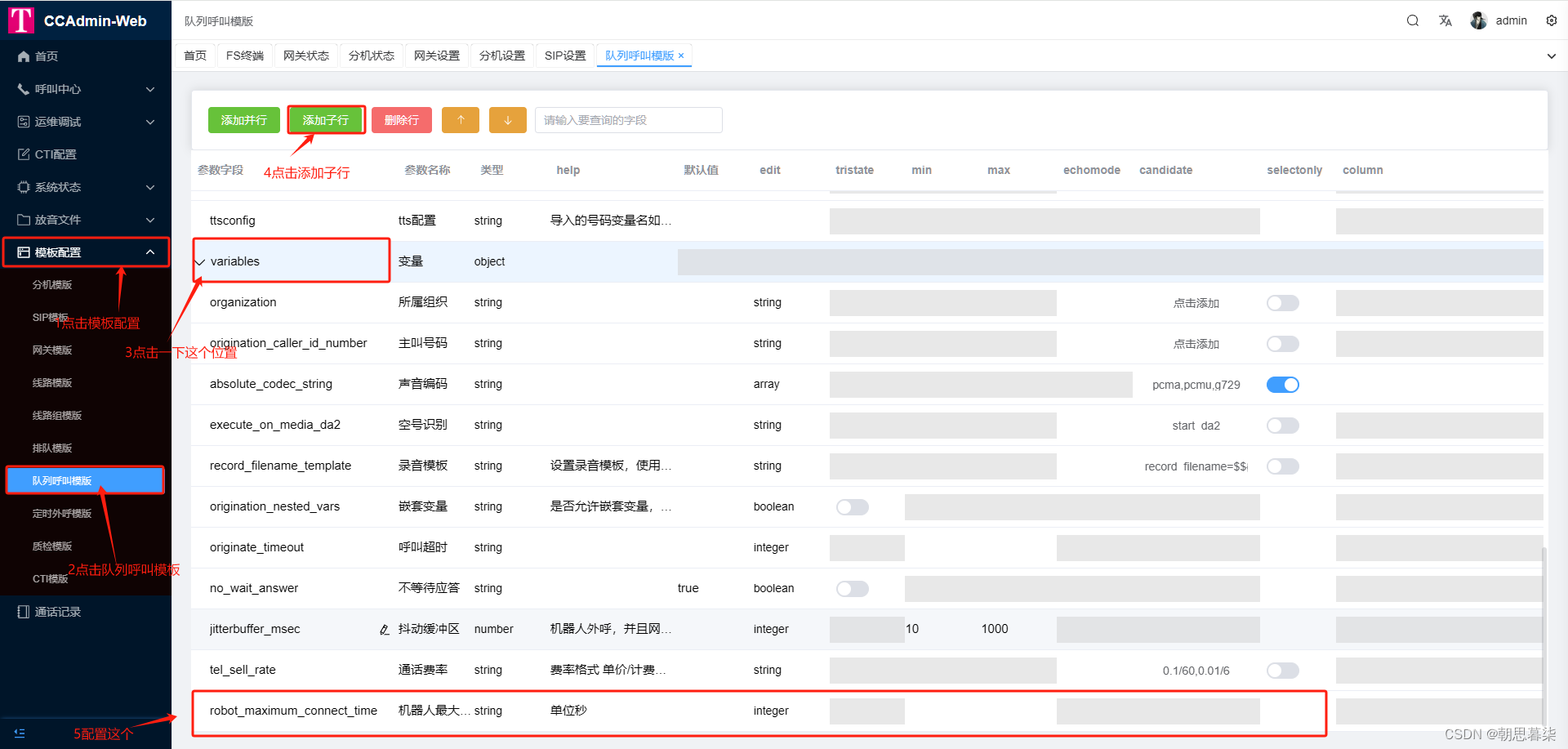
进入机器人的拨号方案park_timeout=${robot_maximum_connect_time},${robot_maximum_connect_time}这个就是最大通话时间的变量,默认值在配置文件vars.xml里面设置robot_maximum_connect_time=3600。如果你要给不同的任务设置不同的机器人最大通话时间,可以给在队列外呼模板添加一个名为robot_maximum_connect_time的变量,然后任务里面给这个变量设置一个你需要的值就可以了。
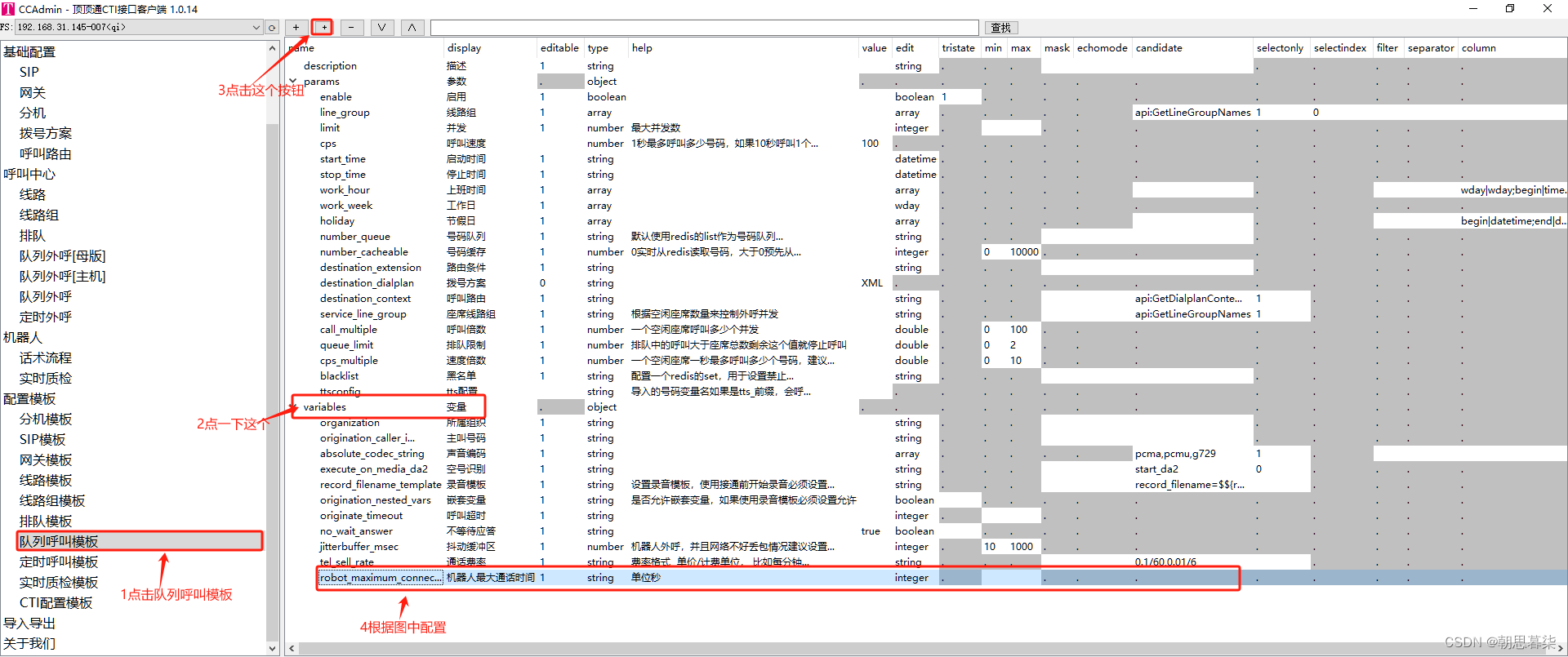
1、配置模板
1、点击队列呼叫模板->2、点一下这个->3、点击这个按钮->4、配置robot_maximum_connect_time,然后根据图中配置,单位秒。
web-ccadmin配置方法
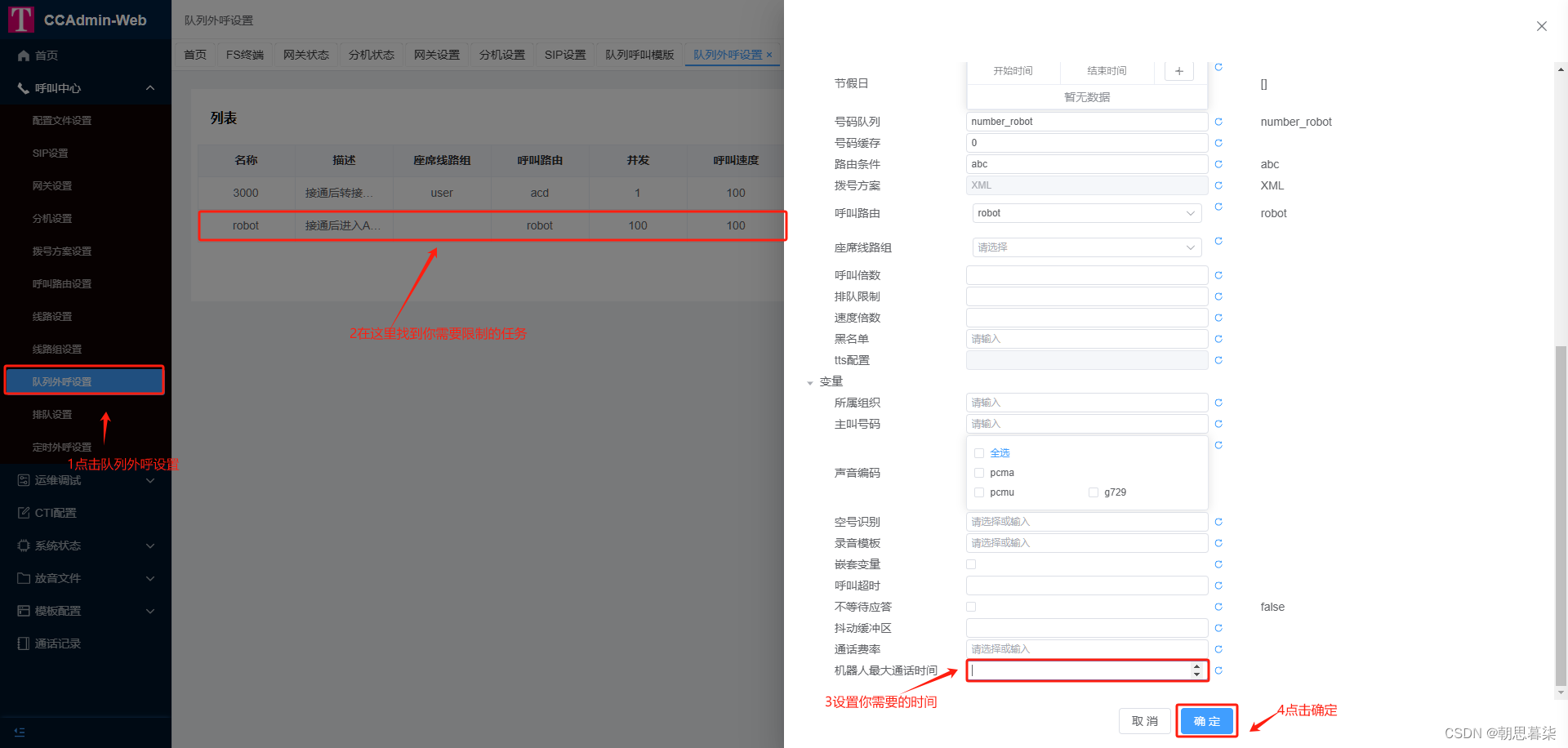
2、队列外呼配置
1、点击队列外呼->2、找到你需要限制时间的外呼任务->3、设置你需要的时间->4、点击更新。单位秒
web-ccadmin配置方法