声明:个人总结记录一下,避免忘记
1、webpack 类型
单文件
直接可以在文件顶部找到加载器
多文件
顶部找不到加载器
如图所示
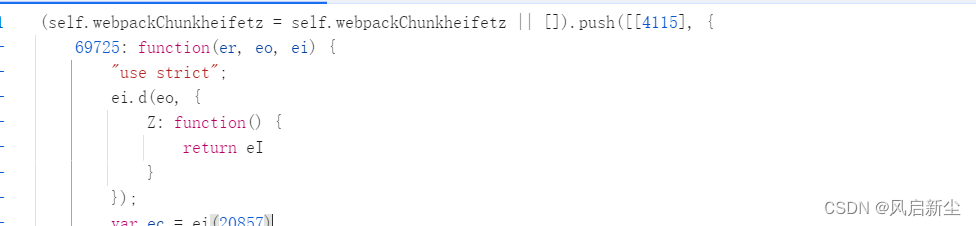
多文件的这话,全局搜所 69725 找到类似n(69725) ,单点n进去,可以找到加载器
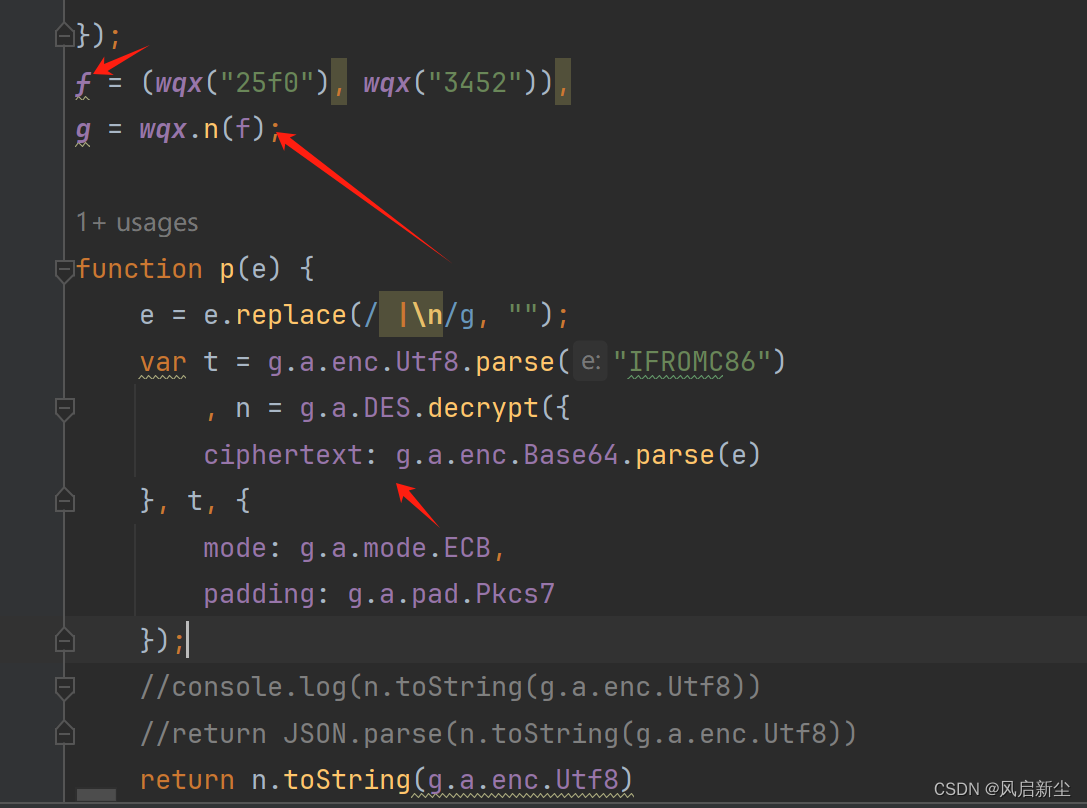
2、调用
通过赋值的方法,进行调用
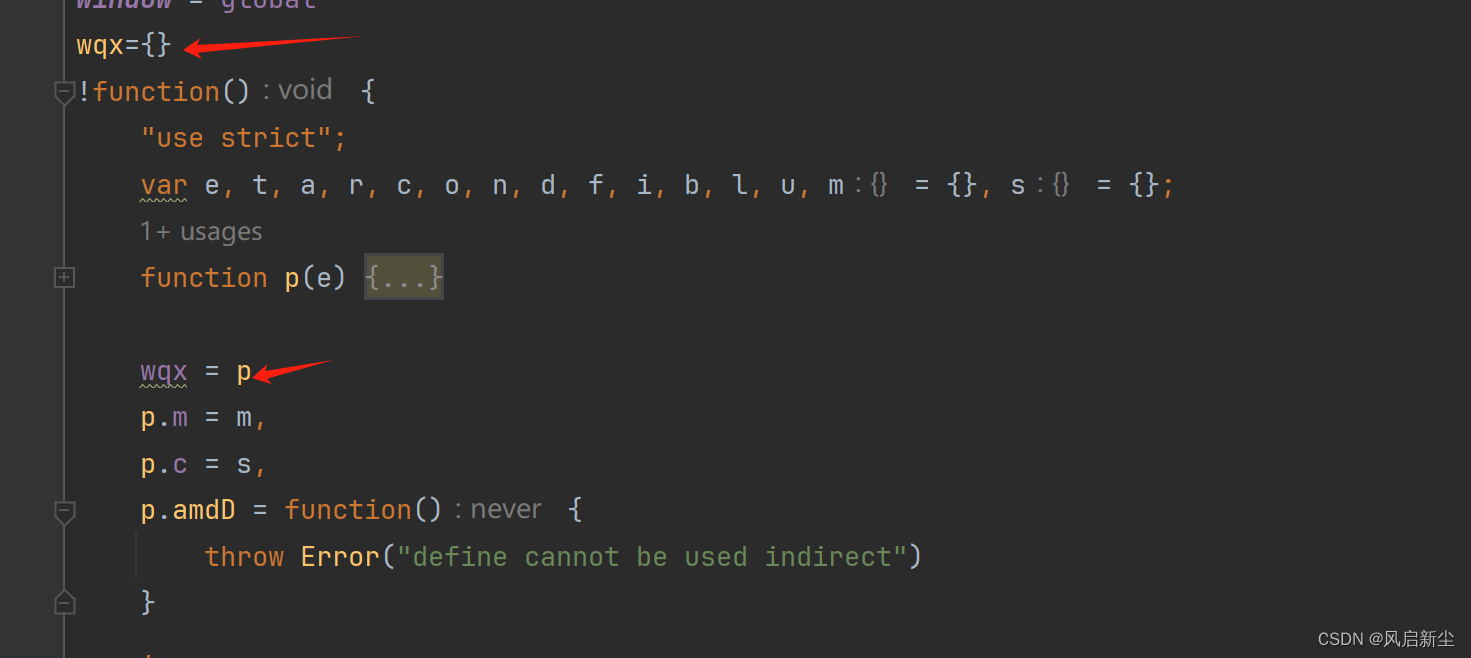
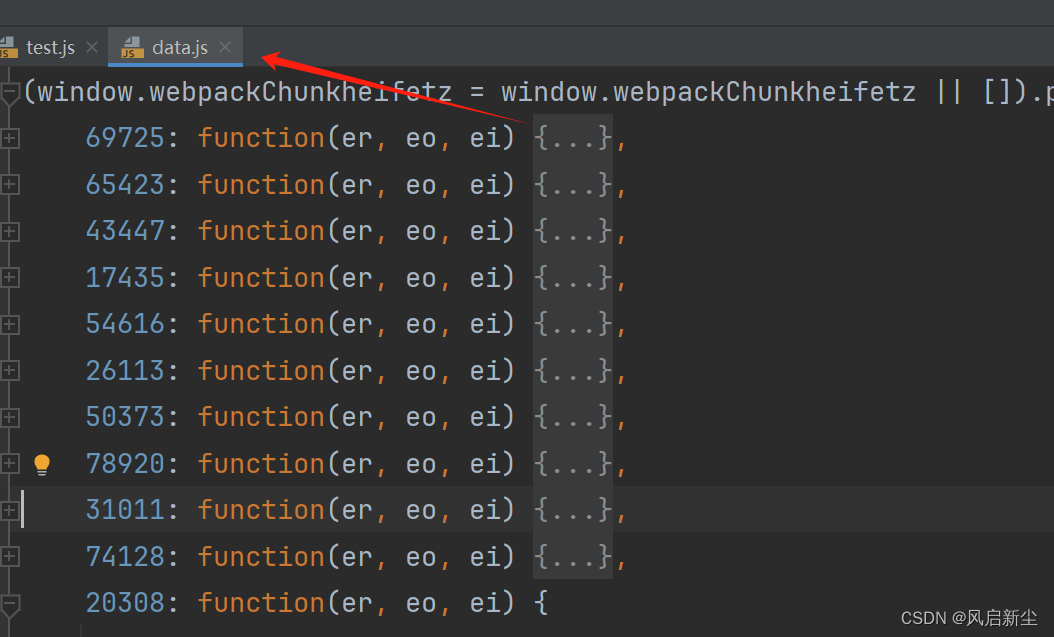
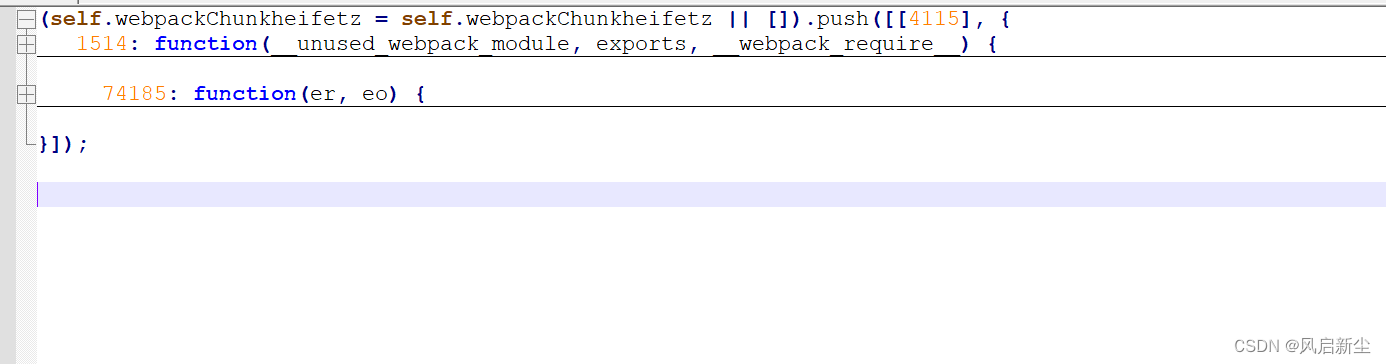
传入我们需要调用的模块,前提的我已经把所有的模块代码都放置在了data文件中。在通过wqx(1514)调用我们所应用到的模块。

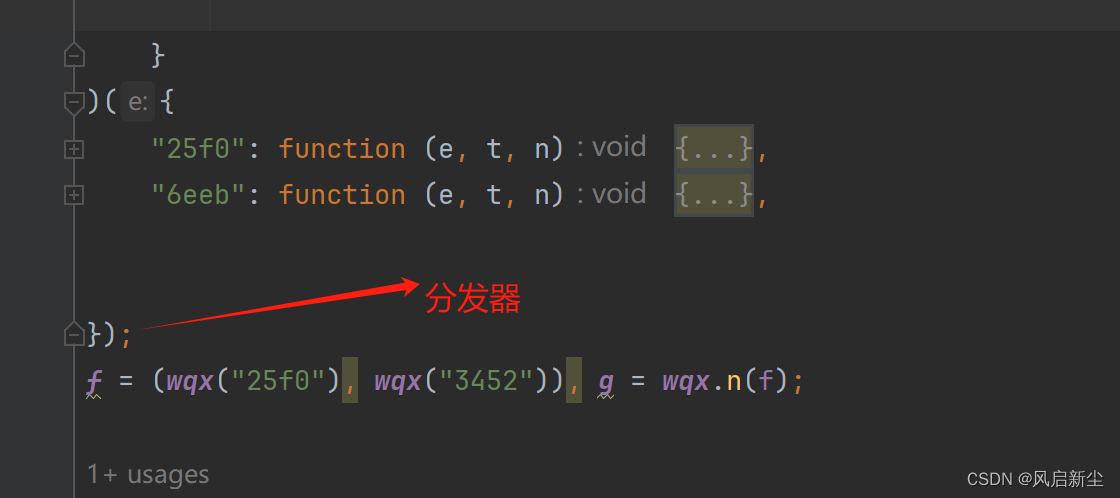
3、其它方法
上面是通过require调用多个文件来调用的,还可以这样调用。通过一步步调试,缺什么模块,往{}补就行。
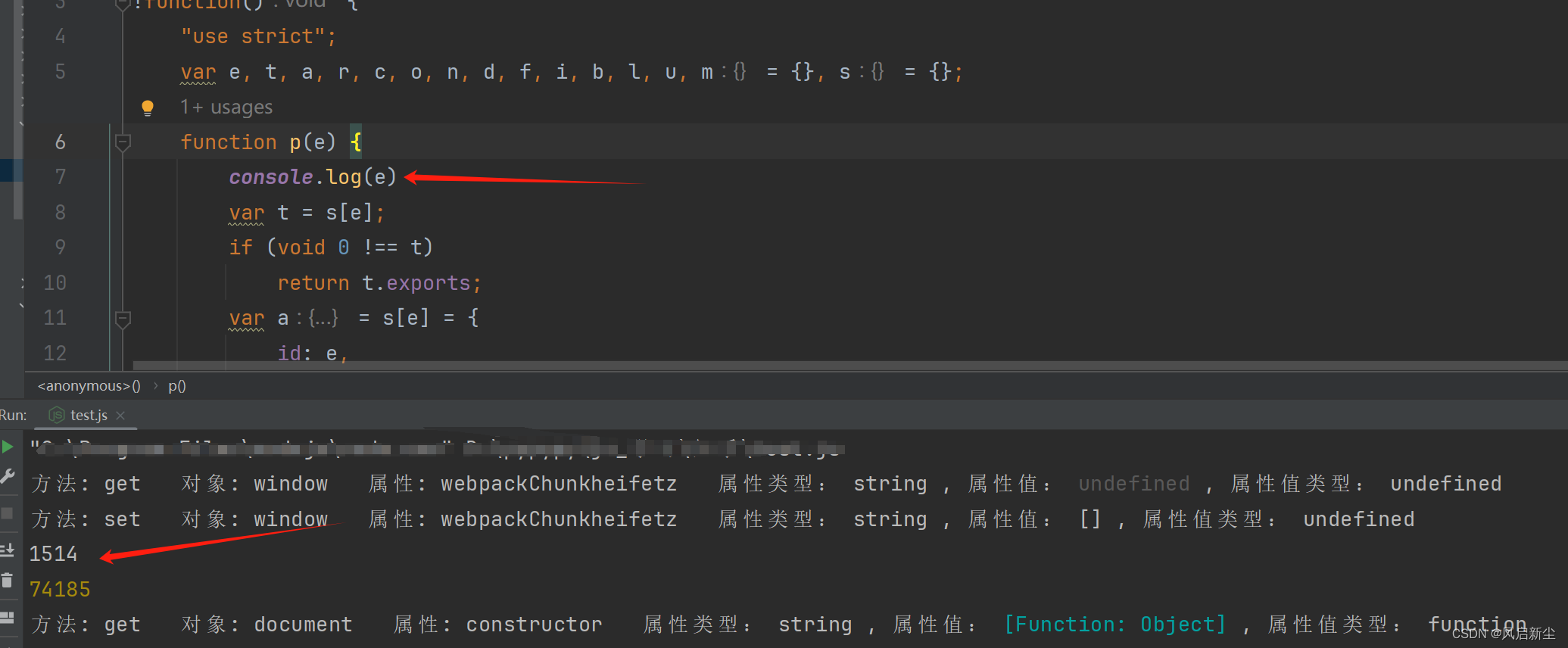
小知识点
当我们把所有模块复制后,运行可能会出现一些不必要的问题,可以用下面方式,确定加载器所调用的模块是哪些,删除不必要的模块
几万行代码,成功缩减到500行。需要主要的是self,改成window就行。
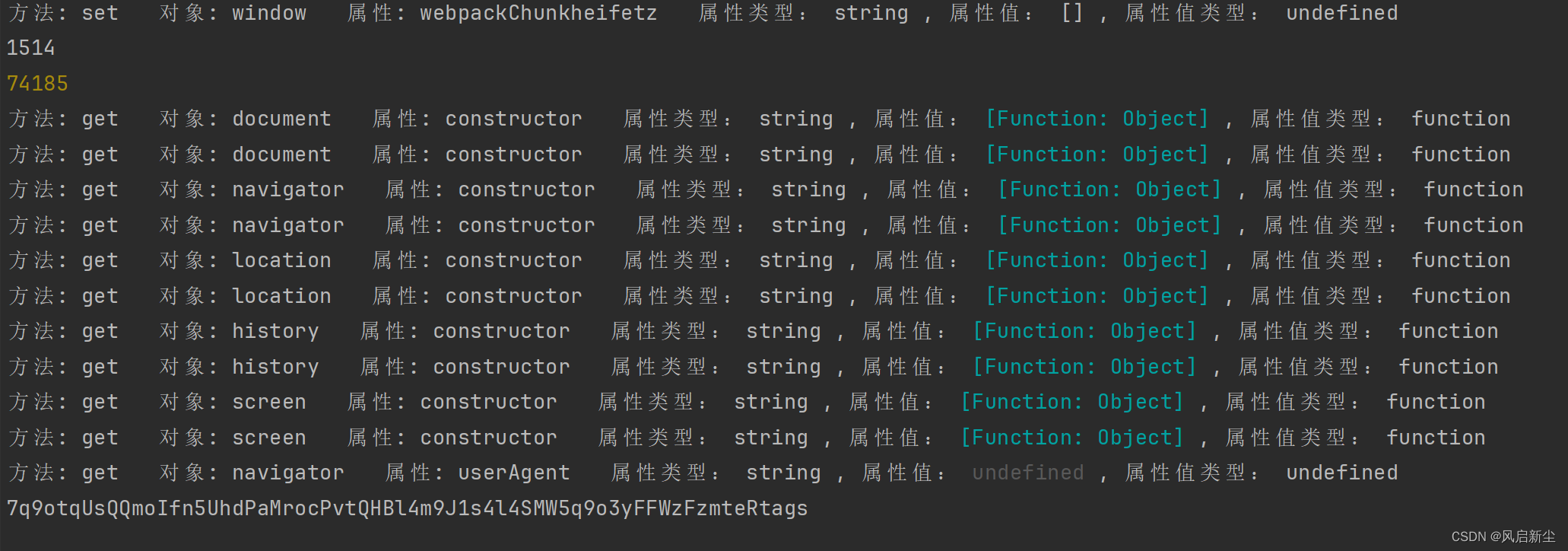
注意:即使这样把所有模块都扣完,生成了值,但也可能不对,需要上代理,补充环境。