咖啡机器人实现定量出水的关键在于流量控制系统的设计,其中霍尔式流量计和光电式流量计是常用的测量设备。这两种流量计均具有精确高、一致性强、多种高低流量控制等特点,能够满足咖啡机器人定量出水的需求。
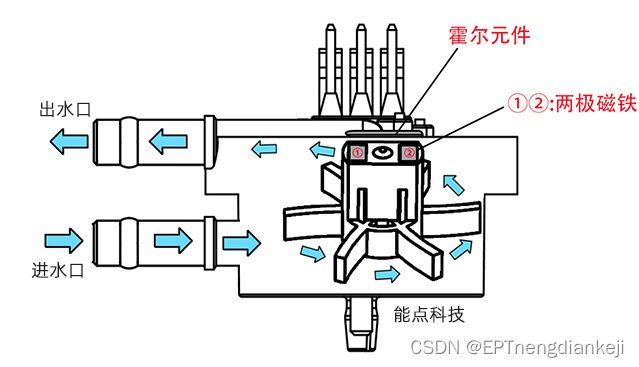
对于霍尔式流量计,其利用霍尔效应来测量流量。通过将带有两极磁铁的叶轮放置于垂直磁场中,叶轮随着液体流动而旋转,产生变化的磁场。这些变化通过霍尔传感器转换为脉冲信号输出,可以准确地测量水流量并实现定量出水。同时,霍尔式流量计体积小,安装简易,符合FDA和FLGB标准,支持流量定制,适用于咖啡机器人这类需要精确流量控制的设备。
另一方面,光电式流量计则通过光学感应原理测量流量,不含磁铁,对水质保护更好。它与霍尔式流量计相比,更适合透光率高的液体(如水)的测量,但透光性差的液体可能会影响测量精度。在特定应用场景下,光电式流量计也可以作为咖啡机器人定量出水的选择之一。
针对咖啡机器人实现定量出水的需求,可以根据液体特性和具体应用环境选择合适的流量计。霍尔式流量计适用范围广泛,精度高且稳定性强,而光电式流量计则在保护水质和透明液体测量方面具有优势。通过合理设计流量控制系统,结合这两种流量计的优势特点,可以实现咖啡机器人的精准定量出水,为用户提供高品质的咖啡体验。