随着无人机技术的飞速发展,无人机在各个领域的应用越来越广泛。然而,无人机的无序飞行和非法使用也带来了一系列安全隐患和威胁。因此,无人机智能追踪反制系统应运而生,成为维护公共安全和防止无人机滥用的重要工具。本文将详细介绍无人机智能追踪反制系统的关键技术环节,包括探测与识别、分析与决策、反制手段执行以及监控与评估等方面。
一、探测与识别
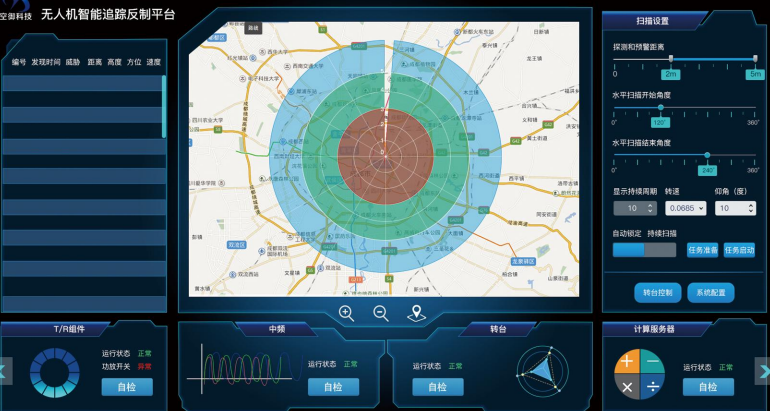
无人机智能追踪反制系统的首要任务是探测并识别目标无人机。这一环节主要通过多种传感器和信号处理技术实现。
-
雷达探测:利用雷达技术扫描空域,发现目标无人机的信号特征。雷达探测具有覆盖范围广、作用距离远的优点,能够及时发现远距离的无人机目标。
-
光学识别:通过高分辨率相机或红外成像仪等设备捕捉无人机的图像信息,利用图像识别算法识别无人机型号、颜色等特征。光学识别可以直观地显示无人机的外观和位置信息,为后续的反制操作提供有力支持。
-
无线电信号识别:利用无人机通信频段的无线电信号特征进行识别。通过监听和分析无人机的通信信号,可以获取无人机的控制指令、数据传输等信息,为反制提供重要的数据支持。
二、分析与决策
在探测与识别目标无人机后,系统需要对收集到的数据进行分析和决策,以确定最佳的反制方案。
-
目标分类与优先级评估:根据无人机的类型、用途和飞行轨迹等信息,对目标无人机进行分类和优先级评估。对于潜在的安全威胁或非法使用行为,系统应将其列为高优先级目标,优先进行反制。
-
反制策略制定:根据目标无人机的特征和优先级评估结果,系统制定相应的反制策略。反制策略包括但不限于干扰无人机通信、诱骗无人机降落、物理捕获等。
-
风险评估与应对:在制定反制策略时,系统需要评估反制操作可能带来的风险,并制定相应的应对措施。例如,在干扰无人机通信时,需要避免对正常通信造成干扰;在诱骗无人机降落时,需要确保降落点安全无虞。
三、反制手段执行
根据分析与决策环节制定的反制策略,系统执行相应的反制手段。
-
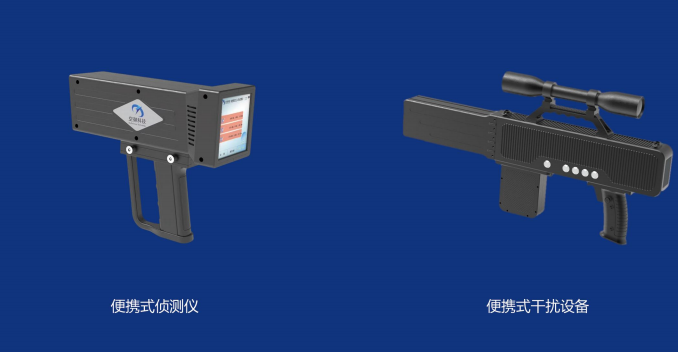
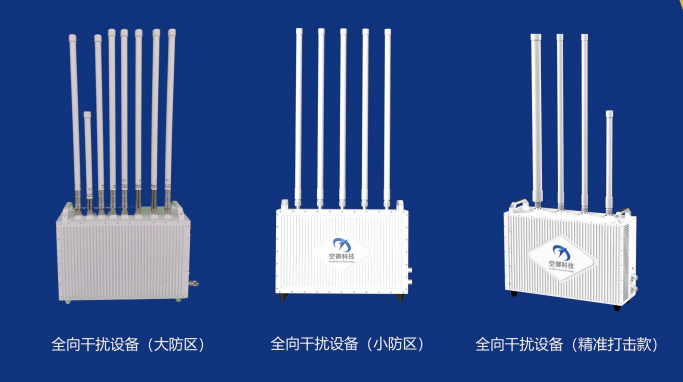
干扰无人机通信:通过发射干扰信号或欺骗信号,破坏无人机与控制台之间的通信链路,使无人机失去控制或接收到错误指令。干扰通信可以迅速降低无人机的威胁程度,为后续操作提供便利。
-
诱骗无人机降落:利用伪造的降落指令或信号,诱使无人机自动降落至指定地点。诱骗降落可以实现对无人机的物理控制,为后续处理提供方便。
-
物理捕获:在无人机接近地面或进入预定区域时,使用网枪、捕捉器等设备将无人机捕获。物理捕获可以直接控制无人机,避免其继续飞行造成安全隐患。
四、监控与评估
在反制操作完成后,系统需要对整个过程进行监控和评估,以确保反制效果并优化反制策略。
-
实时监控:系统通过传感器和监控设备实时收集无人机和目标区域的状态信息,对反制效果进行实时监控。如发现异常或新的威胁情况,系统应及时调整反制策略。
-
数据分析与评估:系统对收集到的数据进行分析和评估,评估反制策略的有效性和可行性。根据评估结果,系统可以优化反制策略并提高系统的性能和效率。
-
反馈与优化:系统将评估结果反馈给操作人员或自动优化算法,以便及时修正反制策略并改进系统的性能。同时,系统还可以收集用户反馈和建议以不断完善和优化自身功能。
总之,无人机智能追踪反制系统是一项涉及多个技术环节和复杂操作的系统工程。通过探测与识别、分析与决策、反制手段执行以及监控与评估等环节的协同作用,系统可以有效地应对无人机安全威胁并保障公共安全。随着技术的不断进步和应用场景的拓展无人机智能追踪反制系统将发挥越来越重要的作用。