编辑:ll
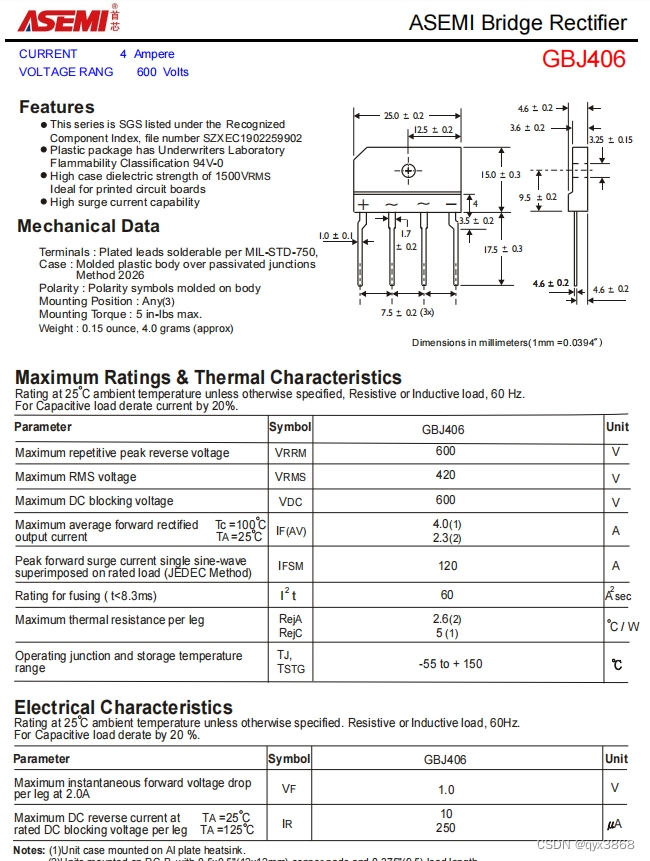
GBJ406-ASEMI无人机专用整流桥GBJ406
型号:GBJ406
品牌:ASEMI
封装:GBJ-4
最大重复峰值反向电压:600V
最大正向平均整流电流(Vdss):4A
功率(Pd):中小功率
芯片个数:4
引脚数量:4
类型:整流扁桥、整流桥
正向浪涌电流:120A
正向电压:1.0V
最大输出电压(RMS):
封装尺寸:如图
工作温度:-55°C~150°C
GBJ406特性:
玻璃钝化芯片
低反向漏电流
高浪涌电流通过能力
高可靠性
高导热性能
高温焊接性能
应用领域:
开关电源
适配器
小家电
智能家居
无人机