这里讲讲无人机的路径跟踪控制相关知识,路径跟踪需要制导率(平面)和控制器,在无人机中较为常用的是L1制导率 ,不过L1制导率是控制无人机在二维平面上的转向,此处还引入总能量控制,控制无人机的高度。
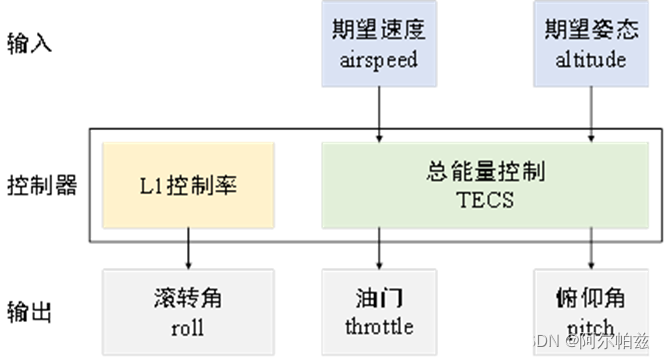
L1制导率
多旋翼无人机,跟踪航路点时只需要将飞行速度方向对准下一个航路点,跟踪航线也仅需首先飞到航线上距离当前位置最近的点即可。
而这项任务对于固定翼无人机相对复杂。因为固定翼无人机的速度方向需要通过航向来改变,而航向则需要通过滚转来改变,这就使得滚转角与速度方向之间形成了近似二阶环节的过程,这通常可以运用导弹的比例导引法来实现航路点跟踪。比例导引法的基本原理就是让飞行器速度矢量在空间中的转动角速度正比于飞行器与目标间的视线角变化率,对于航路点这一静止目标,只需要无人机与航路点之间的距离足够,就可以保证准确抵达下一个航路点,而对于航线跟踪,则需要选择一个虚拟的目标点使得无人机首先向航线靠近,然后再逐步将方向对准航线方向。例如现在被广泛使用的L1 制导算法,就是在航线上选择与无人机距离为L1的参考点,然后根据速度方向与到参考点连线方向之间的夹角计算横向机动的需用过载,进而实现航线跟踪。
总能量控制
飞机的总能量包括势能和动能总和
其余公式不展开写了,总结下来就是速度和高度成反比。
参考文献
2、https://blog.csdn.net/zhangzhijun0906/article/details/105498119