1)实验平台:正点原子ATK-DNK210开发板
2)平台购买地址https://detail.tmall.com/item.htm?id=731866264428
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/docs/boards/xiaoxitongban
第十二章 跑马灯实验
本章实验将介绍如何使用CanMV让Kendryte K210控制板载的双色LED闪烁,以实现跑马灯的效果。通过本章的学习,读者将学习到在CanMV下控制Kendryte K210的GPIO输出高低电平。
本章分为如下几个小节:
12.1 maix.GPIO模块介绍
12.2 硬件设计
12.3 程序设计
12.4 运行验证
12.1 maix.GPIO模块介绍
Kendryte K210上有两种GPIO(General-purpose input/output,通用输入/输出),分别为GPIOHS(高速GPIO)和GPIO(通用GPIO)。
GPIOHS一共有32个,其特点如下所示:
- 可配置输入输出信号
- 每个IO具有独立的中断源
- 中断支持边缘触发和电平触发
- 每个IO可以分配到FPIOA上48个管脚之一
- 可配置上下拉,或者高阻
GPIO一共有8个,其特点如下所示: - 可配置输入输出信号
- 8个IO使用一个中断源
- 可配置触发IO总中断,边沿触发和电平触发
- 每个IO可以分配到FPIOA上48个管脚之一
- 可配置上下拉,或者高阻
在CanMV中可以使用CanMV提供的maix.GPIO模块操作Kendryte K210上的GPIOHS和GPIO。maix.GPIO模块可以配置GPIOHS和GPIO的输入输出模式、设置和获取输入输出值、使能并配置和关闭中断。下面介绍maix.GPIO模块的功能。
maix.GPIO模块中提供了一些常量,这些常用可以用于模块类函数和方法的传参,如下表所示:
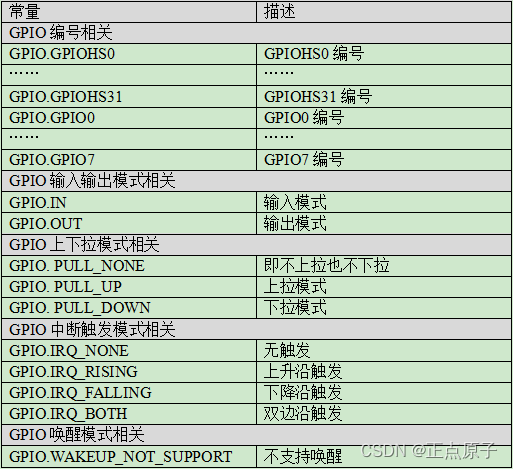
表12.1.1 maix.GPIO模块常量
maix.GPIO模块提供了GPIO构造函数,用于创建一个GPIO对象,GPIO构造函数如下所示:
class GPIO(id, mode=None, pull=None, value=None)
通过GPIO构造函数可以通过指定参数创建一个GPIO对象。
id指的是GPIO编号。
mode可以指定GPIO的输入输出模式。
pull可以指定GPIO的上下拉模式。
value可以设置GPIO的初始输出电平。
GPIO构造函数的使用示例如下所示:
from maix import GPIO
gpiohs0 = GPIO(GPIO.GPIOHS0, mode=GPIO.OUT, pull=GPIO.PULL_NONE, value=0)
maix.GPIO模块为GPIO对象提供了init()方法,用于初始化GPIO对象的参数,init()方法如下所示:
GPIO.init(mode=None, pull=None, value=None)
init()方法用于初始化GPIO对象的输入输出模式、上下拉模式和初识输出电平,当然,也可以在构造GPIO对象的时候进行初始化。
init()方法的使用示例如下所示:
from maix import GPIO
gpiohs0 = GPIO(GPIO.GPIOHS0)
gpiohs0.init(mode=GPIO.OUT, pull=GPIO.PULL_NONE, value=0)
maix.GPIO模块为GPIO对象提供了value()方法,value()方法如下所示:
GPIO.value(value)
value为可选参数,当value参数不为空时,value()方法将设置GPIO对象输出value指定的电平,当value参数为空时,value()方法将获取并返回GPIO对象的电平状态。
value()方法的使用示例如下所示:
from maix import GPIO
gpiohs0 = GPIO(GPIO.GPIOHS0, mode=GPIO.OUT, pull=GPIO.PULL_NONE, value=0)
gpiohs0.value(1)
value = gpiohs0.value()
maix.GPIO为GPIO对象提供了mode()方法,mode()方法如下所示:
GPIO.mode(mode=-1)
mode()方法用于配置GPIO对象的输入输出模式或上下拉模式,当然,也可以在构造GPIO对象的时候进行配置。
mode()方法的使用示例如下所示:
from maix import GPIO
gpiohs0 = GPIO(GPIO.GPIOHS0, mode=GPIO.OUT, pull=GPIO.PULL_NONE, value=0)
gpiohs0.mode(GPIO.IN)
gpiohs0.mode(GPIO.PUll_UP)
maix.GPIO为GPIO对象提供了irq()方法,irq()方法如下所示:
GPIO.irq(handler=None, trigger=GPIO.IRQ_BOTH, wake=None, priority=7)
irq()方法用于配置GPIO对象的中断,可以配置GPIO对象的中断处理函数、中断触发方式、中断优先等级等参数。
irq()方法的使用示例如下所示:
from maix import GPIO
def gpio_irq_handler(gpio):
print('Hello', gpio)
gpiohs0 = GPIO(GPIO.GPIOHS0, GPIO.IN, GPIO.PULL_PU)
gpiohs0.irq(gpio_irq_handler, GPIO.IRQ_FALLING, GPIO.WAKEUP_NOT_SUPPORT, 7)
maix.GPIO为GPIO对象提供了disirq()方法,disirq()方法如下所示:
GPIO.disirq()
disirq()方法用于关闭GPIO对象的中断。
disirq()方法的使用示例如下所示:
from maix import GPIO
def gpio_irq_handler(gpio):
print('Hello', gpio)
gpiohs0 = GPIO(GPIO.GPIOHS0, GPIO.IN, GPIO.PULL_PU)
gpiohs0.irq(gpio_irq_handler, GPIO.IRQ_FALLING, GPIO.WAKEUP_NOT_SUPPORT, 7)
gpiohs0.disirq()
12.2 硬件设计
12.2.1 例程功能
- 控制板载双色LED轮流闪烁,实现跑马灯的效果
12.2.2 硬件资源 - 双色LED
LEDR - IO24
LEDB - IO25
12.2.3 原理图
本章实验内容,需要控制板载双色LED轮流闪烁,以实现跑马灯的效果,正点原子DNK210开发板上双色LED的连接原理图,如下图所示:
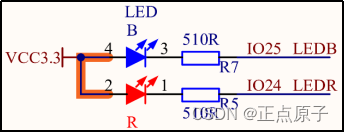
图12.2.3.1 双色LED连接原理图
通过以上原理图可以看出,双色LED中红色和蓝色LED对应的IO编号分别为IO24和IO25,且都是当IO输出低电平时LED亮起,当IO输出高电平时LED熄灭。
12.3 程序设计
12.3.1 maix.GPIO模块
有关maix.GPIO模块的介绍,请见第12.1小节《maix.GPIO模块介绍》。
12.3.2 程序流程图
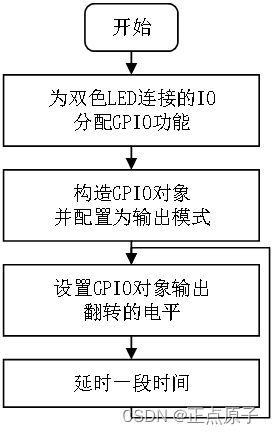
图12.3.2.1 跑马灯实验流程图
12.3.3 main.py代码
main.py中的脚本代码如下所示:
c
from board import board_info
from fpioa_manager import fm
from maix import GPIO
import time为LED连接的IO注册GPIO功能
c
fm.register(board_info.LEDR, fm.fpioa.GPIO0)
fm.register(board_info.LEDB, fm.fpioa.GPIO1)构造GPIO对象
c
ledr = GPIO(GPIO.GPIO0, mode=GPIO.OUT, pull=GPIO.PULL_NONE, value=1)
ledb = GPIO(GPIO.GPIO1, mode=GPIO.OUT, pull=GPIO.PULL_NONE, value=1)
while True:
# 设置LED对应的GPIO对象输出对应的高低电平
ledr.value(0)
ledb.value(1)
time.sleep_ms(200)
ledr.value(1)
ledb.value(0)
time.sleep_ms(200)可以看到,首先通过fm.register()方法为控制双色LED的两个IO分别分配了GPIO0和GPIO1的功能,然后通过GPIO构造函数构造了两个GPIO对象,并均配置为输出模式,最后在一个循环中轮流设置这两个GPIO对象输出不同的高低电平并延时一段时间,从而应该能看到板载的双色LED轮流亮起、熄灭,实现跑马灯的效果。
12.4 运行验证
将DNK210开发板连接CanMV IDE,并点击CanMV IDE上的"开始(运行脚本)"按钮后,可以看到板载的双色LED轮流亮起、熄灭,实现跑马灯的效果,这与理论推断的结果一致。