DreamView数据流
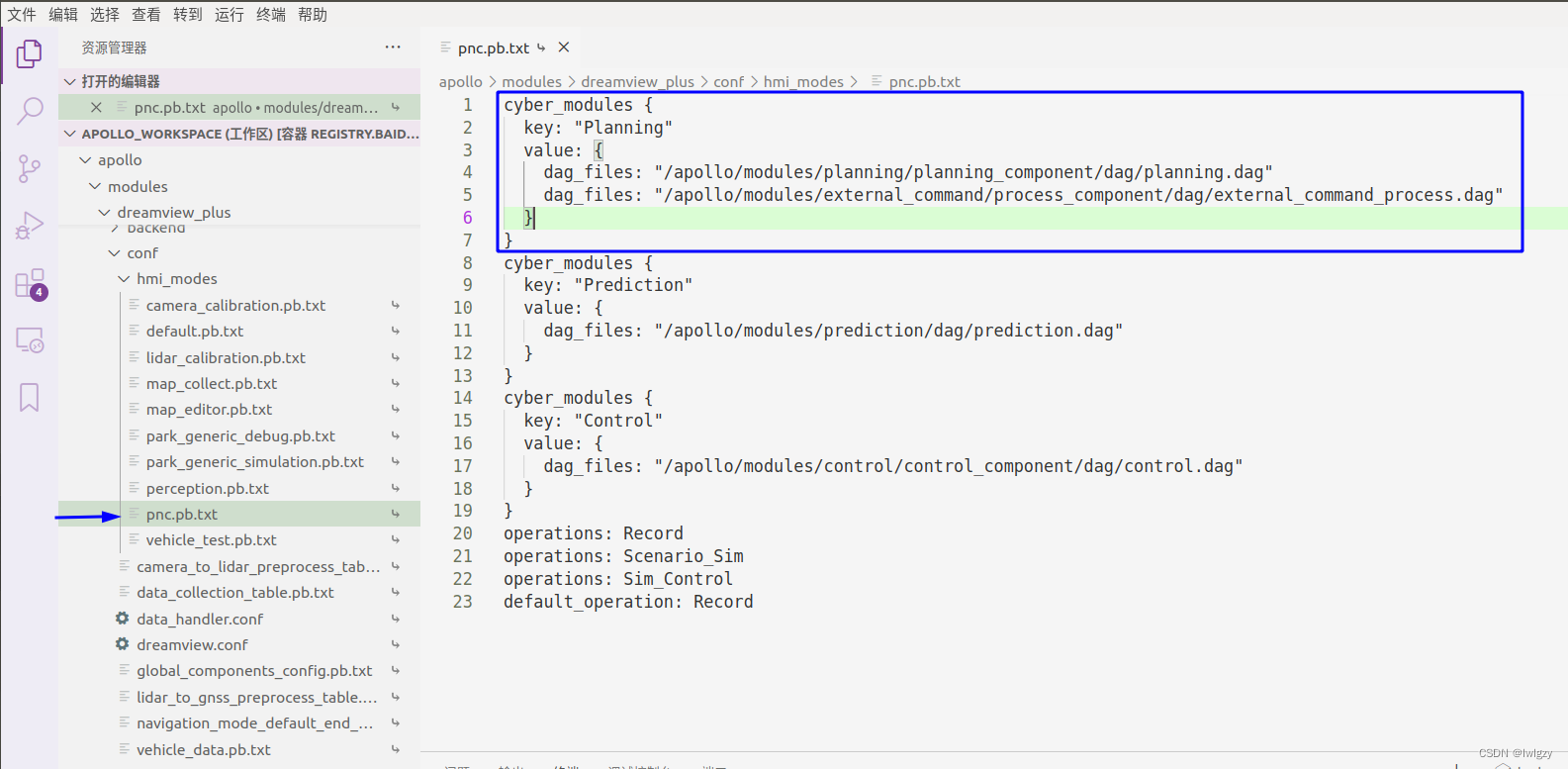
查看DV中界面启动dag,/apollo/modules/dreamview_plus/conf/hmi_modes/pnc.pb.txt可以看到点击界面的planning按钮,后台其实启动的是/apollo/modules/planning/planning_component/dag/planning.dag和/apollo/modules/external_command/process_component/dag/external_command_process.dag这两个dag文件
查看日志less /apollo/data/log/dreamview_plus.INFO .
使用 /进入搜索模式"mainboard";也可以看到实际执行的命令如下。

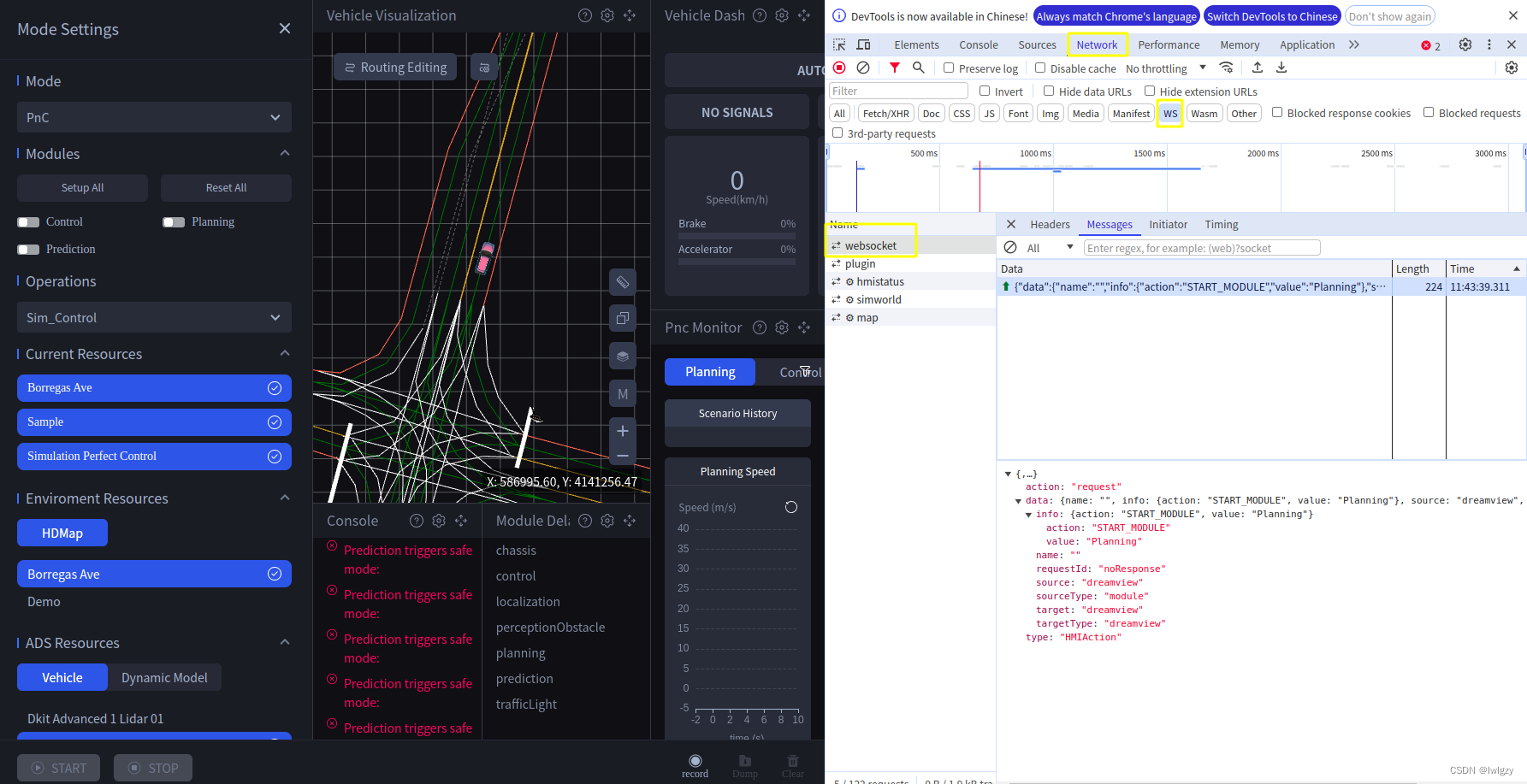
打开界面F12打开调试界面,可以查看websock通信详细信息。