在智能小车项目中都会有一个功能就是自动巡线,今天小飞鱼通达来实验的就是这个红外寻迹传感器。
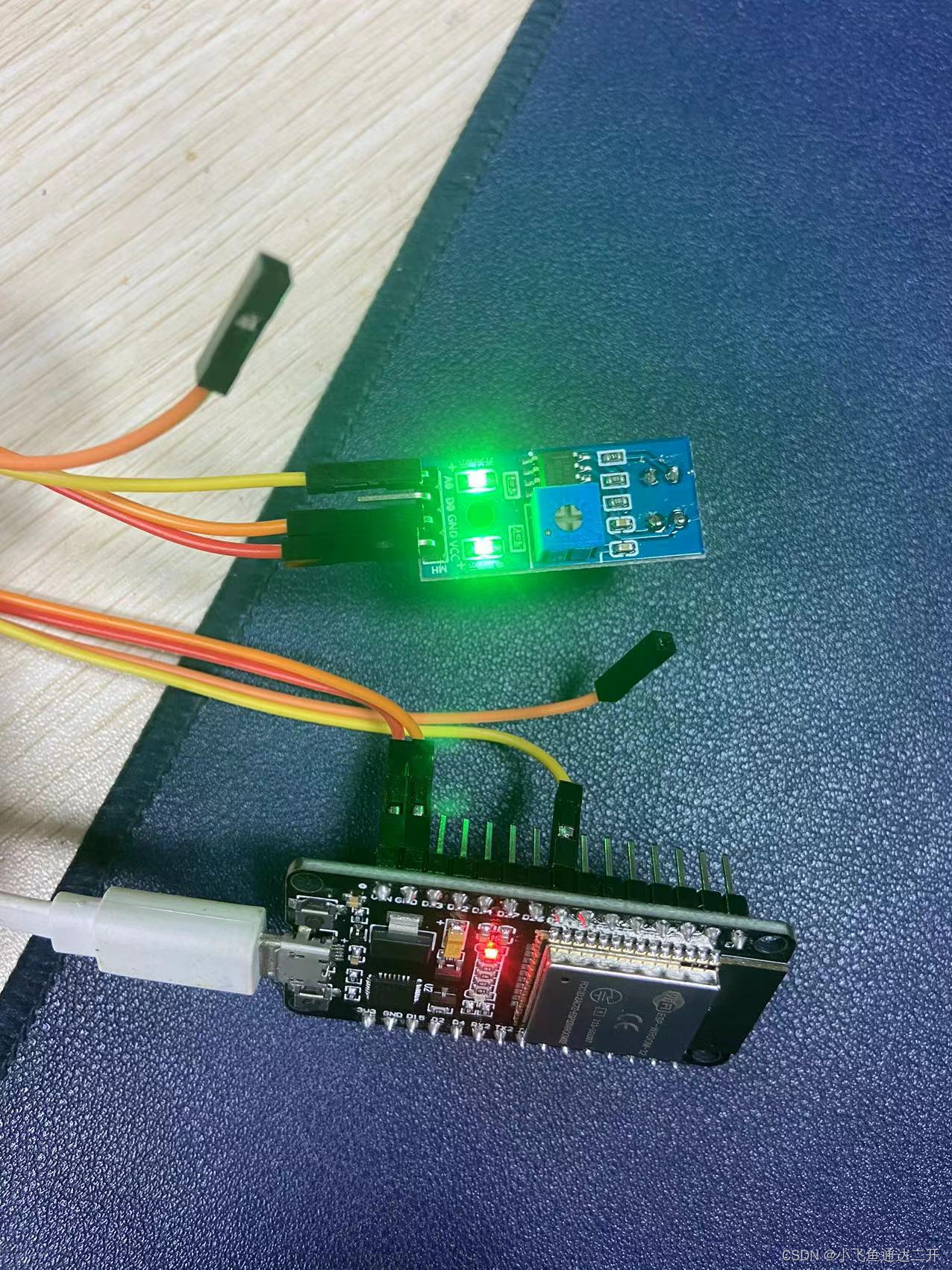
红外寻迹传感器的原理就是有一个小灯发出红外光,光线照到物体后进行反射,有一个接收器进行接收,当在一定距离内会导通电路,
传感器上有4个针脚,正负极2个针脚,另外连个一个是模拟针脚A0,一个是数字针脚D0,根据需要使用其中一个即可,当需要测试准确距离时使用模拟针脚A0。
#define pin 25
void setup(){
Serial.begin(9600); // 设置串口波特率为9600
pinMode(pin, INPUT);
}
float value = 0.0;
void loop(){
value = digitalRead(pin);
//value = analogRead(pin);
Serial.println(value);
delay(200);
}当传感器距离较近且光线照射到白色材料上,返回值为0; 当照射到深颜色材料上返回有数值

扩展内容:
下面是一个红外避障传感器,也是智能小车项目中会用到的模块,通过发射光线返回监测距离前方障碍物的距离,从而做出相应的躲避动作,这就是避障传感器的应用原理。其使用方法和程序和 红外寻迹传感器完全类似,不再重复。
