HUD基本原理

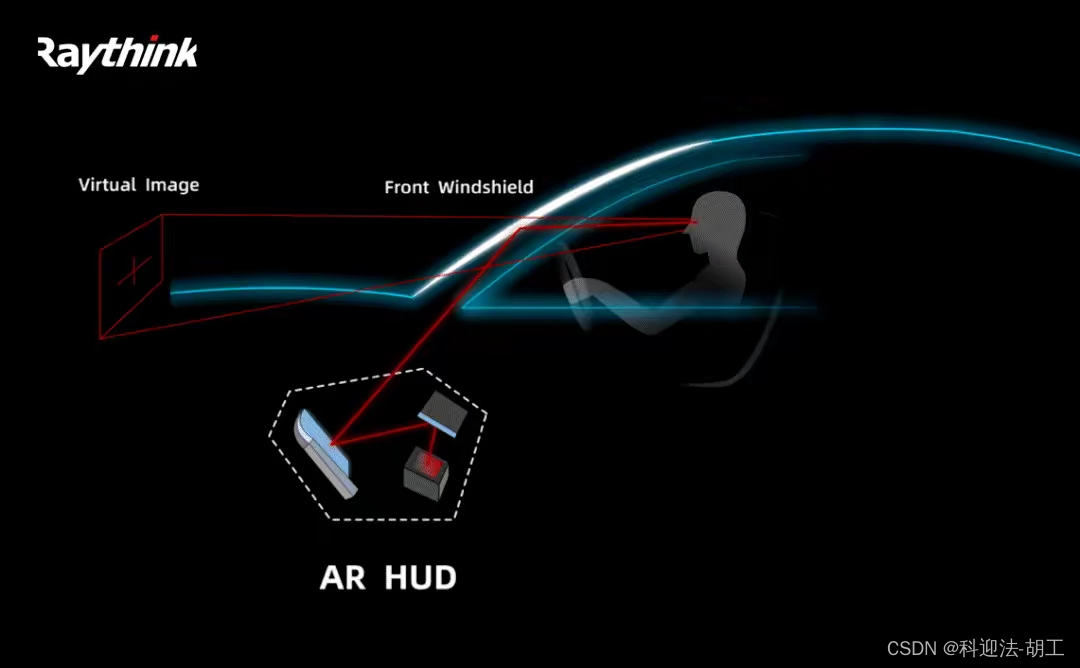
抬头数字显示仪(Head Up Display),又叫平视显示系统,它的作用,就是把时速、导 航等重要的行车信息,投影到驾驶员前风挡玻璃上,让驾驶员尽量做到不低头、不转头 就能看行车信息。
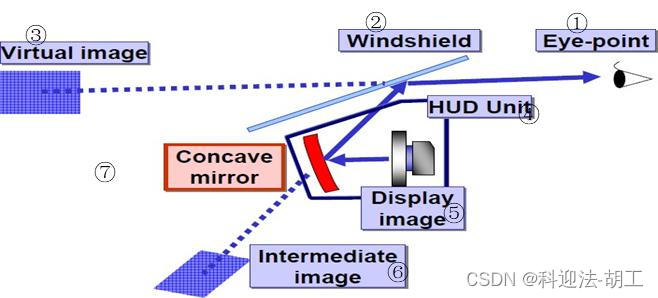
HUD成像为离轴三反的过程,该过程中,PGU中的像被不断放大反射,最终形成虚像,成像大小与FOV 和VID关联性最大,FOV越大,VID越远,投影画幅越大,但这两个参数的增加,HUD体积同步增大。
光线投射过程如下图所示:⑤HUD图像显 示模块发出光源→⑦凹面镜反射放大图像光源→②前挡玻璃再次反射→图像光线进入①人眼→视觉上图像位置在③虚像位置处。
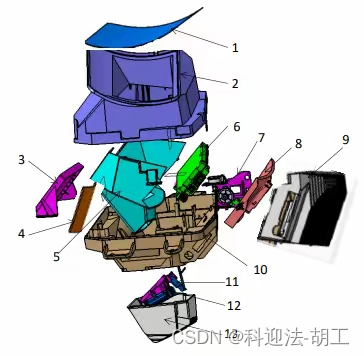
HUD的组件包括:主反射镜、次反射镜、图像生成单元(PGU)、马达模组、PCBA、上盖、底壳、紧固件、内部线束、蜗轮、蜗杆、接近开关、弹片、内部线束、防尘膜和扩散膜等。

2. HUD分类
按照显示画面交互方式分为CHUD、WHUD、ARHUD,目前CHUD基本已经被淘汰,其中,WHUD和ARHUD的区别主要在于是否实现AR实景融合功能以及成像距离VID和FOV

WHUD

ARHUD
3. HUD关键参数
3.1 VID
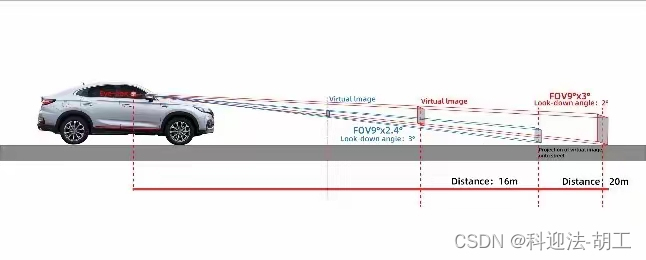
VID(Virtual Image Distance)虚拟图像距离,可以理解为图像焦点到眼睛的距离。就我们的直观感受而言,成像能够覆盖的距离越远,成像尺寸越大,AR-HUD的显示面积就越大。
3.2 FOV
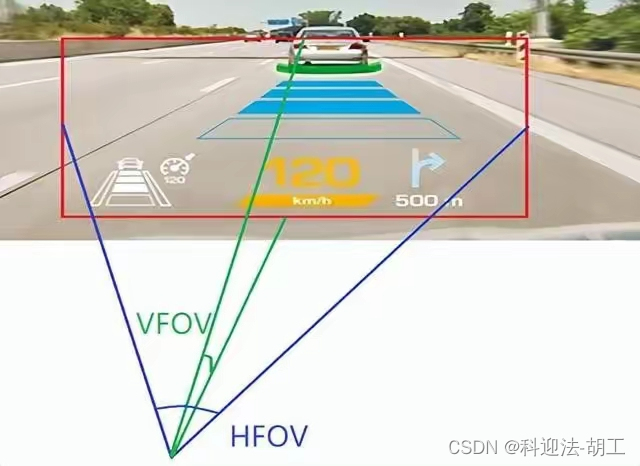
FOV(Field of View) 又名"视场角", FOV是以眼睛为顶点,以眼睛看到虚像的最大范围的两条边缘构成的夹角。 FOV反应了我们看到的AR-HUD图像大小
3.3重影
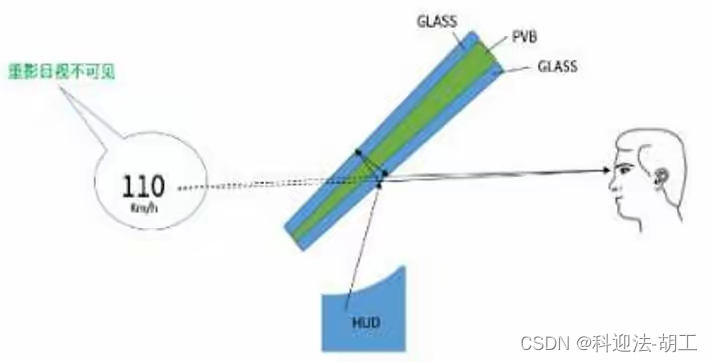
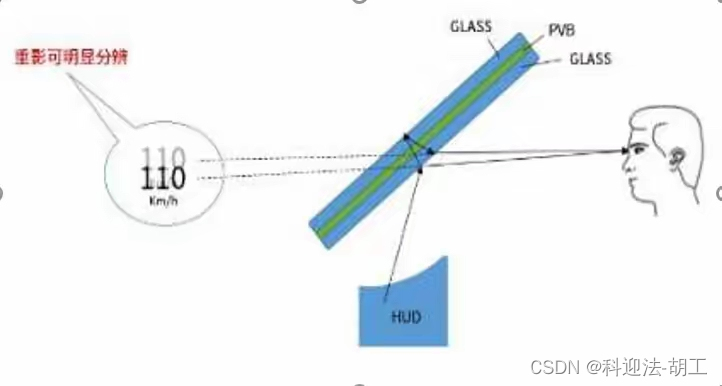
由于玻璃存在厚度,光线会在其中进行折射,在远处虚像位置的附近呈现一个较暗的像,即为重影(Ghost Image)。
为了最大程度消除重影,需要将挡风玻璃的双层玻璃设计成带有楔形角度,针对不同的楔形角度进行分析,寻找重影最小时的最佳楔形角度
3.4畸变及矫正
畸变:HUD显示时,由于玻璃是曲面,存在加工公差,以及整车装车公差等导致显示异常,图像扭曲等。
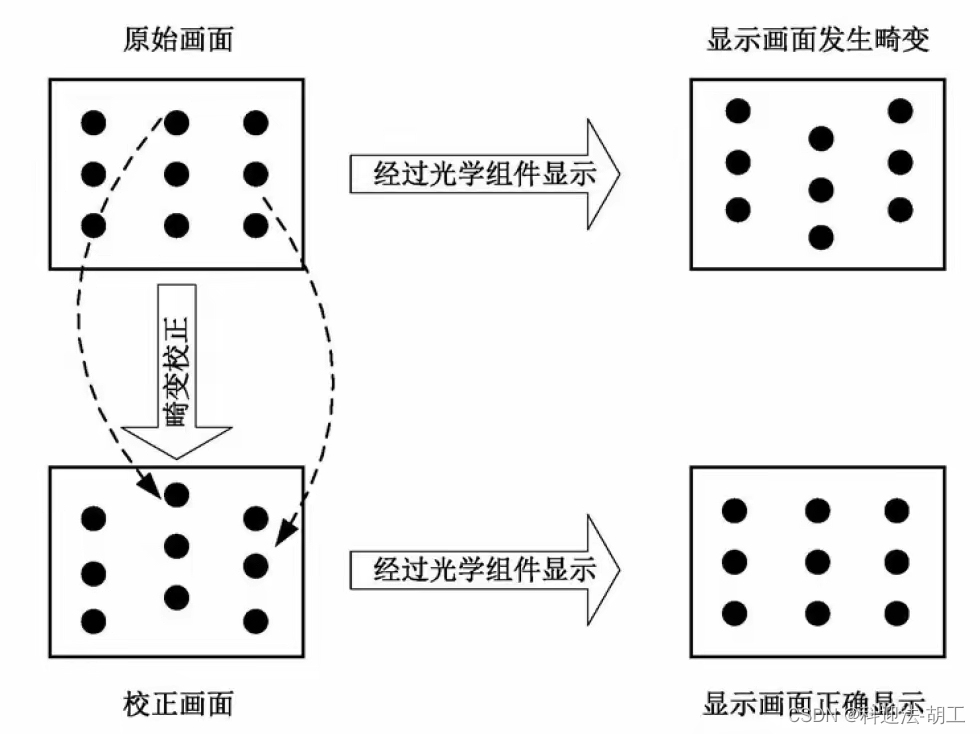
畸变矫正:基于像素级的图像识别分析,通过参数传递更改PGU成像计算结果,使得源图产生预变形来 补正后续光学系统产生的偏差。