一、使用ROS进行手动标定安装
1、安装 image-view &usb_cam ⽤于驱动相机
cpp
sudo apt-get install ros-melodic-image-view
sudo apt-get install ros-melodic-usb-cam2、查看系统视频设备
v4l2-
ctl -d /dev/video0 --all 查询所有相机具体的参数包括width和height
cpp
ls /dev/video*
ls /dev/camera*
v4l2-ctl -d /dev/video0 --all3、修改配置文件
cpp
roscd usb_cam
cd launch
sudo gedit usb_cam-test.launch
cpp
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<!-- modify the video device to your device -->
<param name="video_device" value="/dev/video0" />
<!-- modify the size of your device -->
<param name="image_width" value="1920" />
<param name="image_height" value="1080" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false"
output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>4、开启相机
启动有warning例如提⽰校准配置⽂件 head_camera.yaml not found ,这个是正常的,我们标定
完后才会⽣成这个配置⽂件。
cpp
roslaunch usb_cam usb_cam-test.launch5、根据棋盘格修改参数
- ⼀个是size参数为棋盘格⻆点数量⽐如 8x9=72 个格⼦的棋盘格,⻆点个数为 7x8=63 个,size
参数就要写 7x8 ; - 另外⼀个参数为square,传⼊的参数为棋盘格⼀个小格⼦的宽度(注意单位为m);
- image:=/usb_cam/image_raw 标定当前订阅图像来源⾃名为 /usb_cam/image_raw 的
topic; - camera:=/usb_cam 为摄像机名。
cpp
rosrun camera_calibration cameracalibrator.py --size 7x6 --square 0.05 image:=/usb_cam/image_raw camera:=/usb_cam6、图像采集
相机数据采集的过程需要分为两组互相配合,⼀组使⽤ROS程序进⾏采集;另⼀组⼿持棋盘格,在图像
视野范围内进⾏操作和移动。⽰例使⽤的标定板为 7×6 个 50mm×50mm ⼤小的标准棋盘格进⾏。注意,这
⾥的7×6指的是有横向7个⻆点(而⾮格⼦)与纵向6个⻆点。

-
⼿持棋盘格要求:
每次采集尽量保持稳定,最终成像光线适中,图像清晰;
⼿持棋盘格时不能对棋盘格进⾏遮挡,不能离开相机视野范围内;
采集图像类型需要丰富多样,包含:近距离图像、中距离图像、远距离图像、左右倾斜图像、
上下倾斜图像、轻微旋转图像、较⼤旋转图像、相机靠近左视野边缘图像、相机靠近右视野边
缘图像等;采集有效图像的数量在50张左右。
-
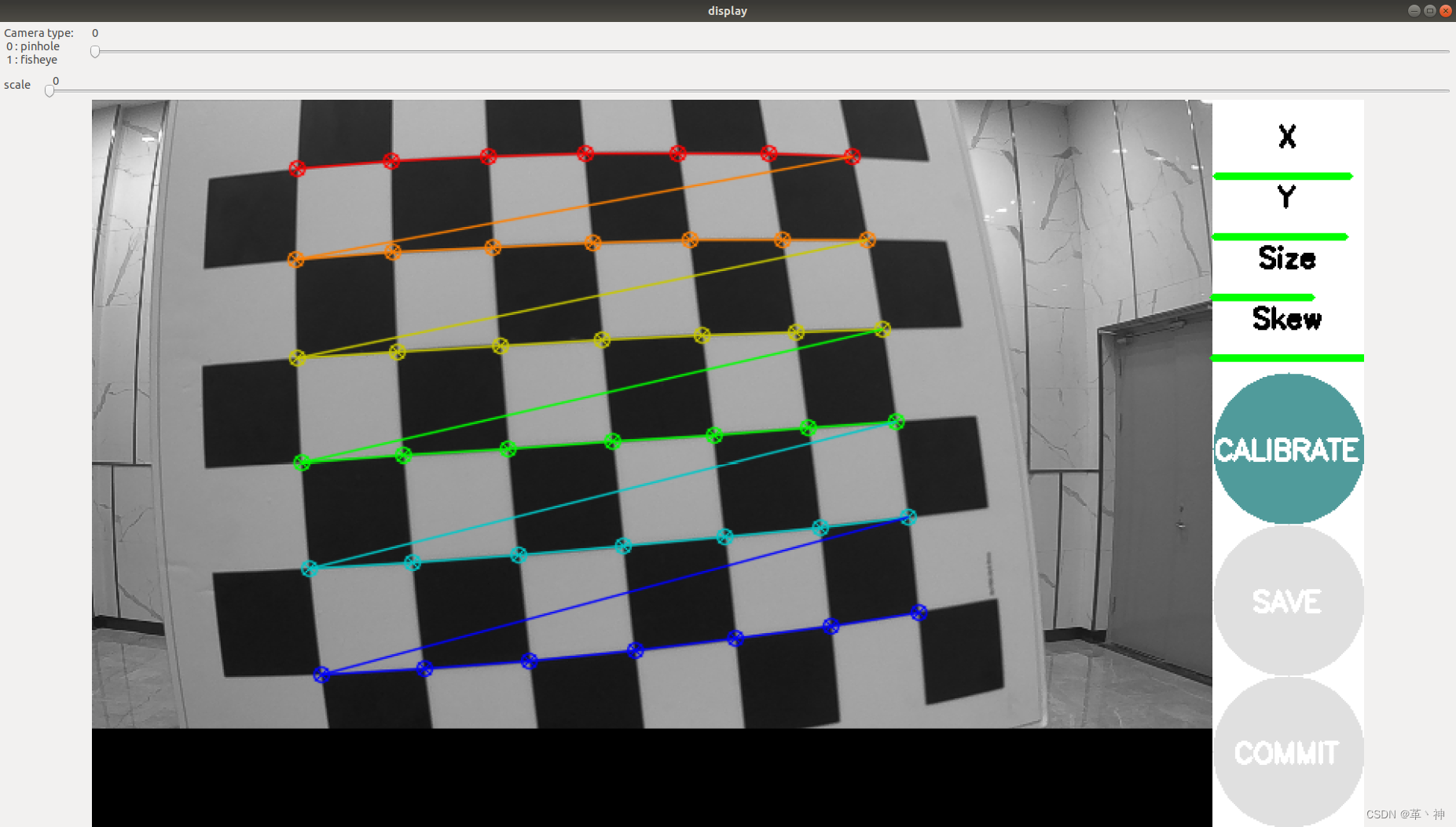
界⾯中的 X , Y , size , skew 的含义:
X :表⽰标定板在视野中的左右位置。
Y :表⽰标定板在视野中的上下位置。
size :标定板在占视野的尺⼨⼤小,也可以理解为标定板离摄像头的远近。
skew :标定板在视野中的倾斜位置
-
标定实操技巧:
在相机视野范围内且能识别棋盘格的前提下,左右、上下和前后移动范围尽可能⼤⼀些,将有助于更快
地满⾜ X , Y , Size 的要求;边移动边扭转标定板,可以更快完成 Skew 。当 X 、 Y 、 Size 、 Skew 四个
都变成绿⾊,然后就可以看到 CALIBRATE 这个按钮变成⻘⾊,表明已经采到⾜够多的图⽚数据可供标定
了。
7、开始标定
点击 CALCULATE 进⾏标定会稍微有点卡顿,不要担⼼后台正在进⾏标定,标定完成后观察当前的相机界
⾯,
如果相机成像完全正常了,则说明标定成功了,在终端界⾯会有对应的参数 D K R P :
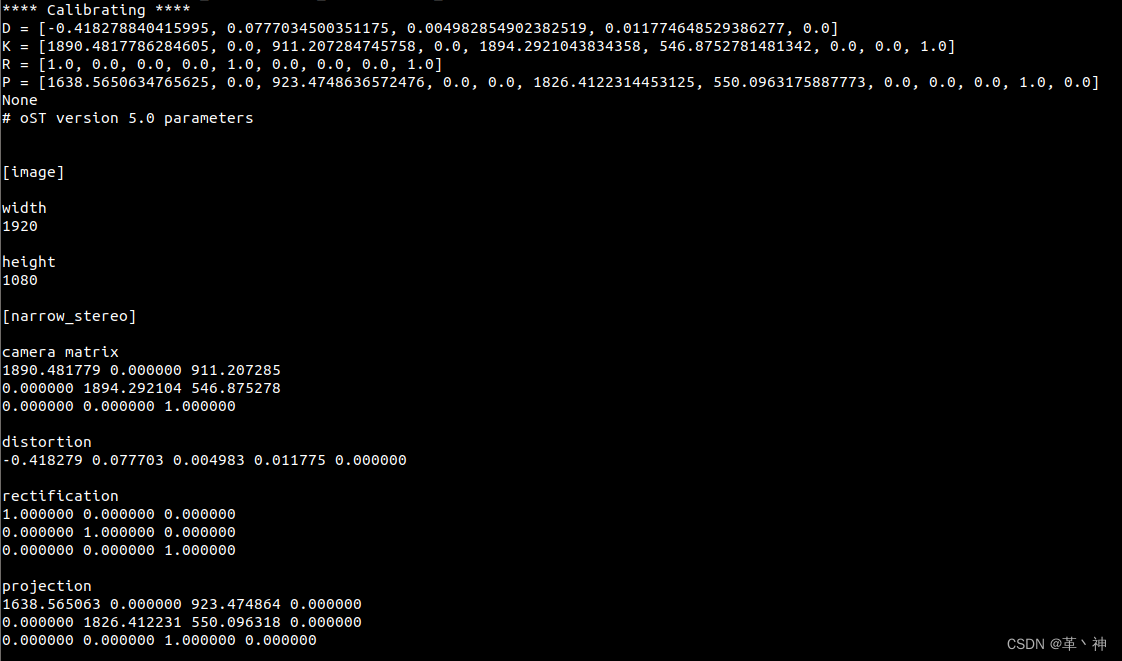
另外,点击标定界⾯右下⾯的 SAVE 和 COMMIT 按钮,可保存标定完成后的⽂件到路径
/tmp/calibrationdata.tar.gz 。