一、技术要点
1. 多源定位技术
九轴惯性导航(IMU):通过加速度计、陀螺仪和电子罗盘实时解算姿态角(横滚、俯仰、偏航),提供基础姿态基准,并在GPS失效时维持短时定位。
光流与视觉定位:利用底部摄像头捕捉地面纹理,通过光流法计算水平位移积分,结合前置摄像头的关键帧图像匹配(如特征点匹配、轮廓匹配)修正位置漂移。
综合定位方案:例如RTK(实时动态差分定位)与视觉融合,将定位误差降至厘米级,适用于精准降落场景。
2. 分层路径规划策略
高度分层控制:如高空阶段(>50米)优先调整飞行方向与姿态应对气流;低空阶段(<20米)聚焦速度与高度精细控制,确保平稳着陆。
动态返航路径生成:采用改进蚁群算法、历史路径匹配(RoadA/RoadB集合)规划最短避障路径,或根据环境光线选择"直线返航"或"原路返航"。
3. 姿态与运动控制
PID控制器:以初始姿态角为基准,通过比例-积分-微分参数实时修正飞行偏差,维持稳定状态。
动态平台降落:结合无人机母车标识识别与PID跟踪,实现移动平台(如车辆、船只)上的精准降落。
二、技术难点与挑战
1. 复杂环境感知与避障
视觉系统局限性:弱光、纹理缺失(如水面、雪地)导致光流失效;细小障碍物(电线、树枝)难以被传感器检测。
解决方案:多传感器冗余(红外+超声波+视觉),并预设"设定高度返航"模式强制爬升避障。
2. 计算实时性与资源约束
图像匹配算力需求:SLAM建图或关键帧特征匹配需高频计算,嵌入式平台难以满足实时性。
优化方向:采用轻量化网络压缩图像特征描述子,或预存储低分辨率轮廓模板加速匹配。
3. 多源数据融合与误差控制
惯性导航累积误差:IMU积分漂移需依赖GPS或图像匹配定期校正。
电池电量预测不确定性:温度、风速影响续航,导致返航电量误判。部分系统引入卡尔曼滤波动态预估剩余航程。
- 复杂环境适应性挑战
不同环境对返航技术提出差异化挑战,需针对性解决:

三、运行方式(以典型场景为例)
1. 触发阶段
条件判断:检测低电量、GPS失效、遥控断联(>6秒)或手动指令,触发返航。
返航点确认:起飞点自动记录,或动态更新为移动平台位置。
2. 路径执行阶段
环境感知决策:
光线充足时:启动高级智能返航,实时构建3D地图并绕障。
弱光/GPS失效时:启用原路返航,沿历史路径反向飞行50米后直线降落。
分层控制流程:
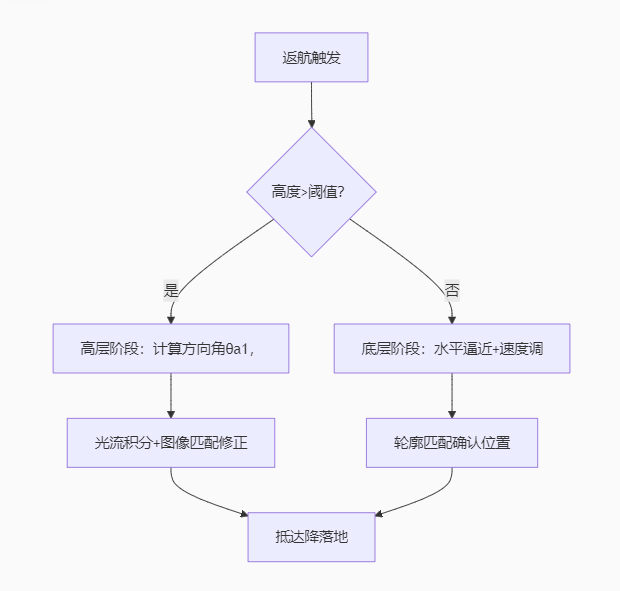
3. 精准降落阶段
地形匹配:在返航点上方对比起飞时地形特征,水平校正位置。
动态平台跟踪:识别母车顶标识,通过PID控制调整降落轨迹。
安全检测:超声波检测地面平整度,不适降则悬停报警。
