海事巡察
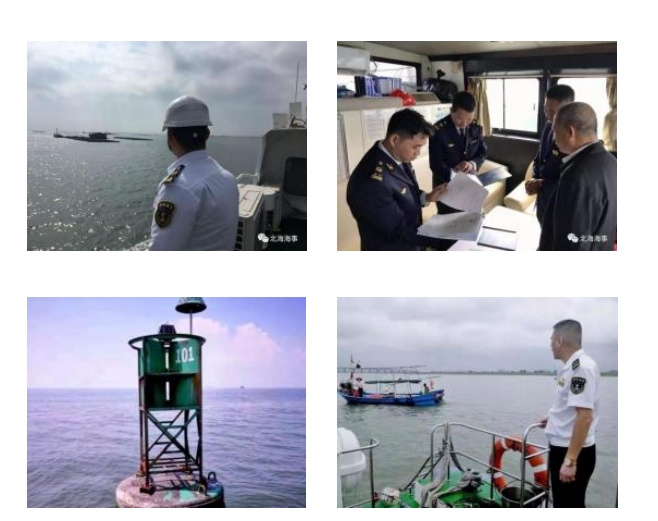
海事巡察现状
巡查效率低下,存在视野盲区,耗时长,人力成本高。
海事的职能
-
统一管理水上交通安全和防治船舶污染。
-
管理通航秩序、通航环境。负责水域的划定和监督管理,维护水 上交通秩序;核定船舶靠泊安全条件;核准与通航安全有关的岸线 使用和水上水下施工、作业;管理沉船沉物打捞和碍航物清除;
-
负责航海保障工作。管理沿海航标、无线电导航和水上安全通信; 管理海区港口航道测绘并组织编印相关航海图书资料;承担水上搜 寻救助组织、协调和指导的有关工作。
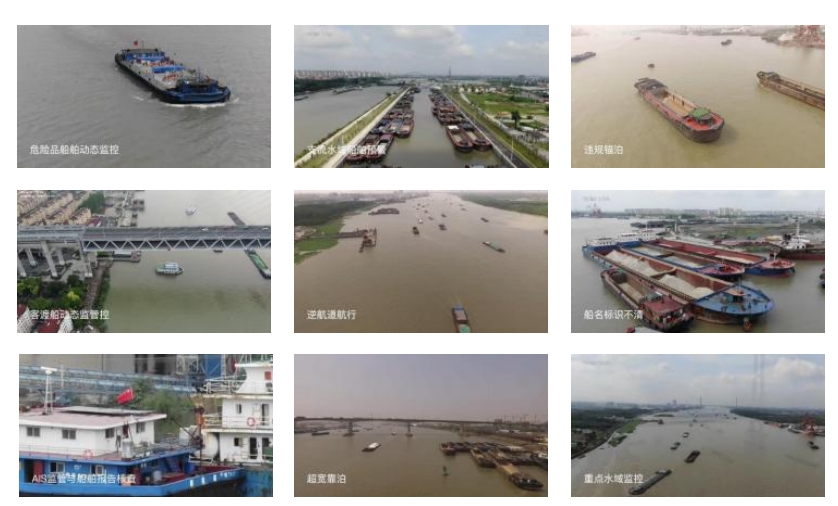
日常巡察的多样性
无人机已经应用在日常巡查的多个方面:
• 危险品船舶动态监控
• 客渡船动态监控
• 支流水域通航预警
• 船名标识不清
• 航道逆行
• 违规锚泊
• AIS监管
• 水工作业监管
• 水上应急救援
日常巡查的多样性
超宽靠泊
案例背景
管辖海域通航量大,很容易导致小型船舶的大面积容易聚集,挤占主航道, 具有较大安全隐患。传统的"超宽纠违"程序需要执法人员进行现场勘测, 取证耗时极长。
无人机工作流程
1.无人机日常按照指定航线进行巡查时,发现一处码头存在超宽靠泊现象。
2.无人机飞抵上方进行喊话驱离,拒不悔改的,开始取证 。
3.执法人员立即打开网格线设置,参照九宫格标线位置控制无人机的飞行速度和拍照节奏,完成该码头俯拍照片的获取。
4.多角度拍摄涉事船舶的船名标号便于通过协同平台确认船舶信息。
5.飞机返航,照片导入大疆智图生成二维正射影像,标注时间和地理坐标位置,并测量每一档船舶的超宽数据。
6.最后政务中心制作《海事行政处罚决定书》并送达当事人完成处罚。
