定义
FreeRTOS 满足实施系统对任务响应时间的要求。
实时操作系统、轻量级(内核小,只需要几KB的ROM和RAM)、
提供了一些内核功能,如任务管理、时间管理、内存管理和通信机制等。
和裸机的区别
裸机:无操作系统,直接操作系统,缺乏任务调度难以管理多任务。只能顺序执行任务
多任务管理:可以创建多个任务,通过时间片轮转算法进行任务切换。
任务管理
c
# 裸机
void music()
void movie()
void main(){
while(1){
music();
movie();
}
}
# freeRTOS通过时间片轮转算法不断切换任务,实现了音画基本同步,提高了用户体验
void task1(){
music();
}
void task2(){
movie();
}
void main(){
while(1){
task1();
taks2();
}
}提供内存管理、任务间通信机制
利用CUBMX快速配置FreeRTOS
freeRTOS需要使用systick滴答时钟作为系统提供时基,因此需要更换stm32内核的时基为其他定时器


生成多出的代码

osThreadDef 为FreeRTOS用于定于任务的宏
osThreadDef(name, thread, priority, instances, stacksz)
name为任务的名称,thread为任务的处理函数(函数指针,传入函数名即可),priority为任务的优先级,instances为任务的实例数,stacksz为任务的堆大小 栈
osThreadCreate用于创建任务的函数
osThreadId osThreadCreate (const osThreadDef_t *thread_def, void *argument)
thread_def为任务定义的指针,argument为传递给任务处理函数的参数CUBMEX创建了一个默认的任务

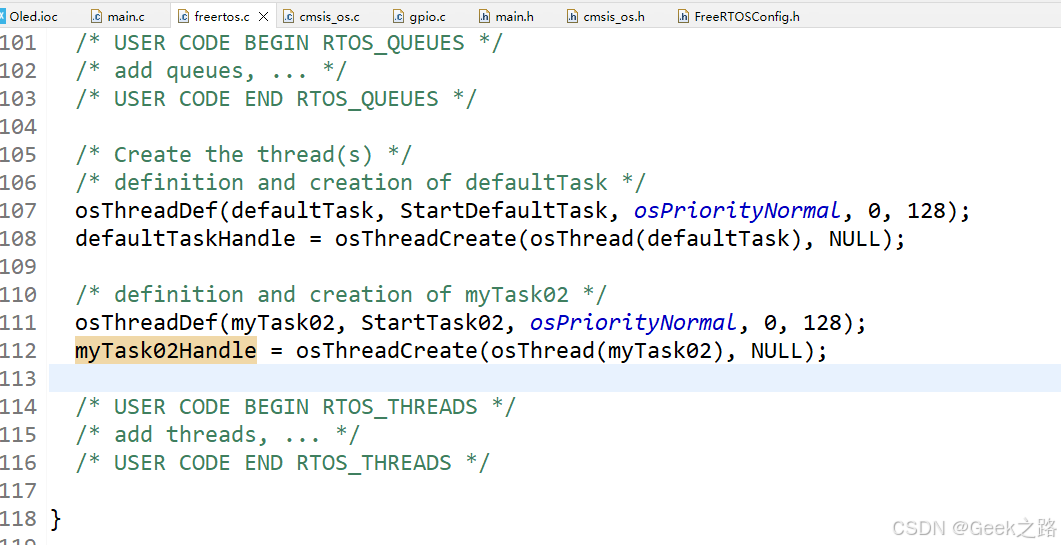
在FreeRTOS.init中创建了任务
c
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);也创建了对应的任务处理函数
c
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
# 上面defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL)中
# 传递参数为NULL,所以这里StartDefaultTask()里的argument也为NULL手动创建第一个自己的任务
仿照CUBMEX创建的默认任务,在main.c中创建自己的任务,实现每 500ms led闪烁一次
c
#导入头文件
#include "FreeRTOS.h"
#include "task.h"
osThreadId myTaskHandle;#任务句柄ID
void myTask1(void const * argument)
{
for(;;)
{
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
osDelay(500);//每 500ms LED闪烁一次
}
}
/* Initialize all configured peripherals */
MX_GPIO_Init();
osThreadDef(myTask, myTask1, osPriorityNormal, 0, 128);
myTaskHandle = osThreadCreate(osThread(myTask), NULL);堆、栈、FreeRTOS里的任务栈
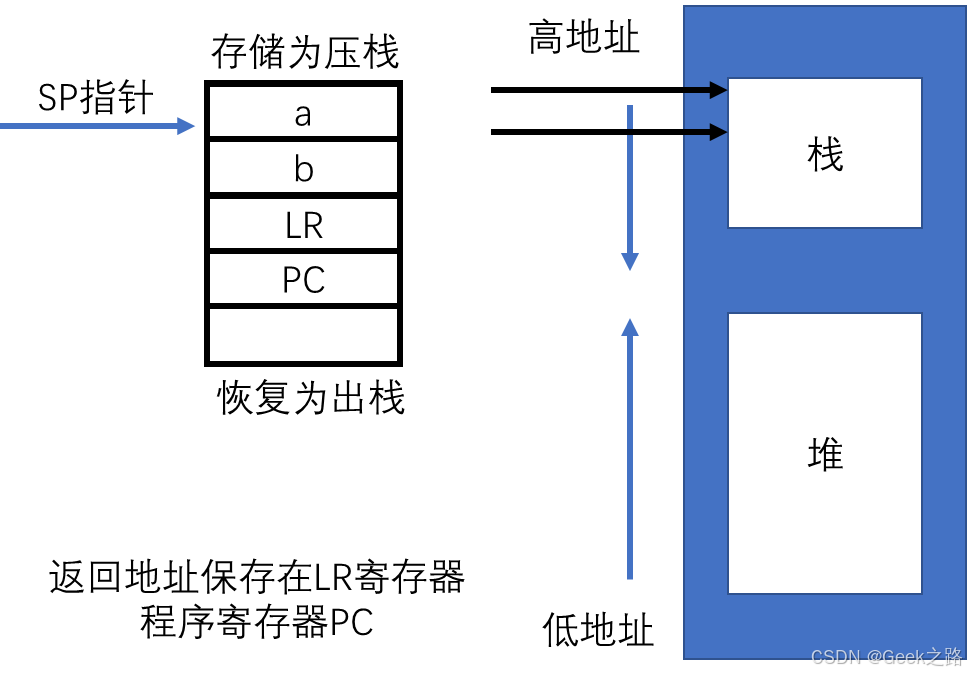
堆:操作系统里非常大的一块内存,比如malloc函数就是申请堆里的一块区域使用,不过不free释放,那么申请一块就少一块。
栈:存储局部变量和函数调用消息的数据结构。栈的大小在程序编译时确定,通常较小。
void func(){
}
int main(void){
int a=0;
int b=0;
func();
return 0;
}执行完func()函数如何跳回主函数,这就使用到了栈。
堆的分配是动态的,由人决定;堆的分配是静态的,由编译器自动控制,编译时确定,运行时无法改变。
堆的分配效率低,需要运行时动态分配和释放。栈的分配效率高,由编译器编译时确定分配大小。
FreeRTOS里的任务栈:创建每一个任务都分配了一块栈空间,任务栈的大小在创建任务时指定,任务栈无需我们管理。
FreeRTOSCongfig.h(FreeRTOS的大总管)
该文件主要包含了各种宏定义,有功能宏、API宏...,可以对FreeRTOS灵活配置。详细可参考各种宏的说明
包含任务调度器、内存管理、时间管理、中断处理等方面的配置。
一部分如下图

常用比较重要的6个宏:
configUSE_PREEMPTION定义任务调度器的抢占式调度或者协同式调度。
为 1 时 RTOS 使用抢占式调度器,即当进程位于内核空间时,有一个更高优先级的任务出现时,如果当前内核允许抢占,则可以将当前任务挂起,执行优先级更高的进程;为 0 时 RTOS 使用协作式调度器(时间片)高优先级的进程不能中止正在内核中运行的低优先级的进程而抢占 CPU 运行。
configUSE_IDLE_HOOK 定义是否使用空闲任务钩子函数。
configUSE_TICK_HOOK 定义是否使用系统滴答钩子函数。c
configTICK_RATE_HZ 定义是否使用系统滴答频率。
configCPU_CLOCK_HZ 定义系统时钟频率。
configMAX_PRIORITIES 定义系统支持的最大任务优先级。
任务调度算法
多个任务的执行顺序、时间如何确定。
实时系统的调度需求:响应时间要要求、任务优先级、资源利用率。
FreeRTOS的任务调度算法分为抢占式调度算法(优先级抢占式调度算法、时间片轮转调度算法)、非抢占式调度算法(优先级调度算法、先来先服务调度算法)。
优先级抢占式调度算法:任务优先级越高执行的机会越大,相同时执行时间片轮转调度算法。 满足实时操作系统的响应要求、有优先级管理,缺点是优先级低的任务可能被长时间阻塞。
时间片轮转调度算法:每个任务被分配一个时间片,时间片用完后任务被挂起,等待下一次调度。 公平分配CPU时间片、避免优先级低的任务被长时间阻塞。 缺点无法满足实时操作系统的响应要求。
FreeRTOS默认开启优先级抢占式调度算法、时间片轮转调度算法结合使用。
利用CUBMX创建任务
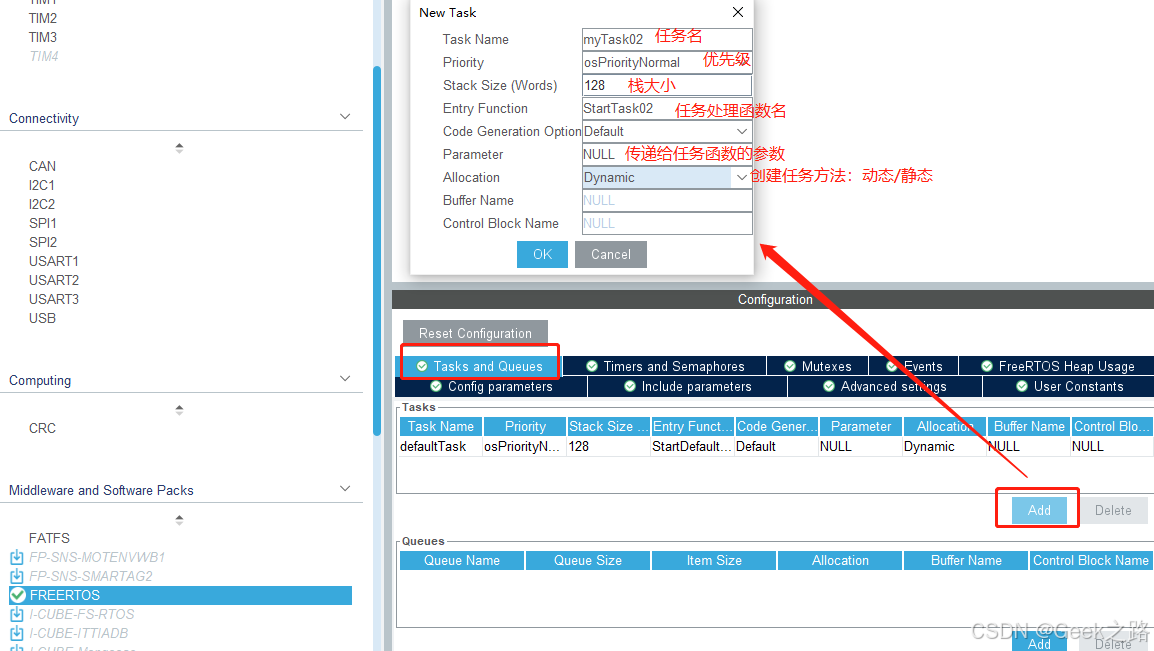
可以看到生成的代码和手动配置的代码一样