工作原理
模块有2个超声波换能器(如图所示),一个发出声波,另一个接收物体反射回来的声波,这中间所经过的时间即声波传播的时间,再结合声速就能计算出:
距离 = 声速 * 时间 ÷ 2
如何使用HC-SR04模块
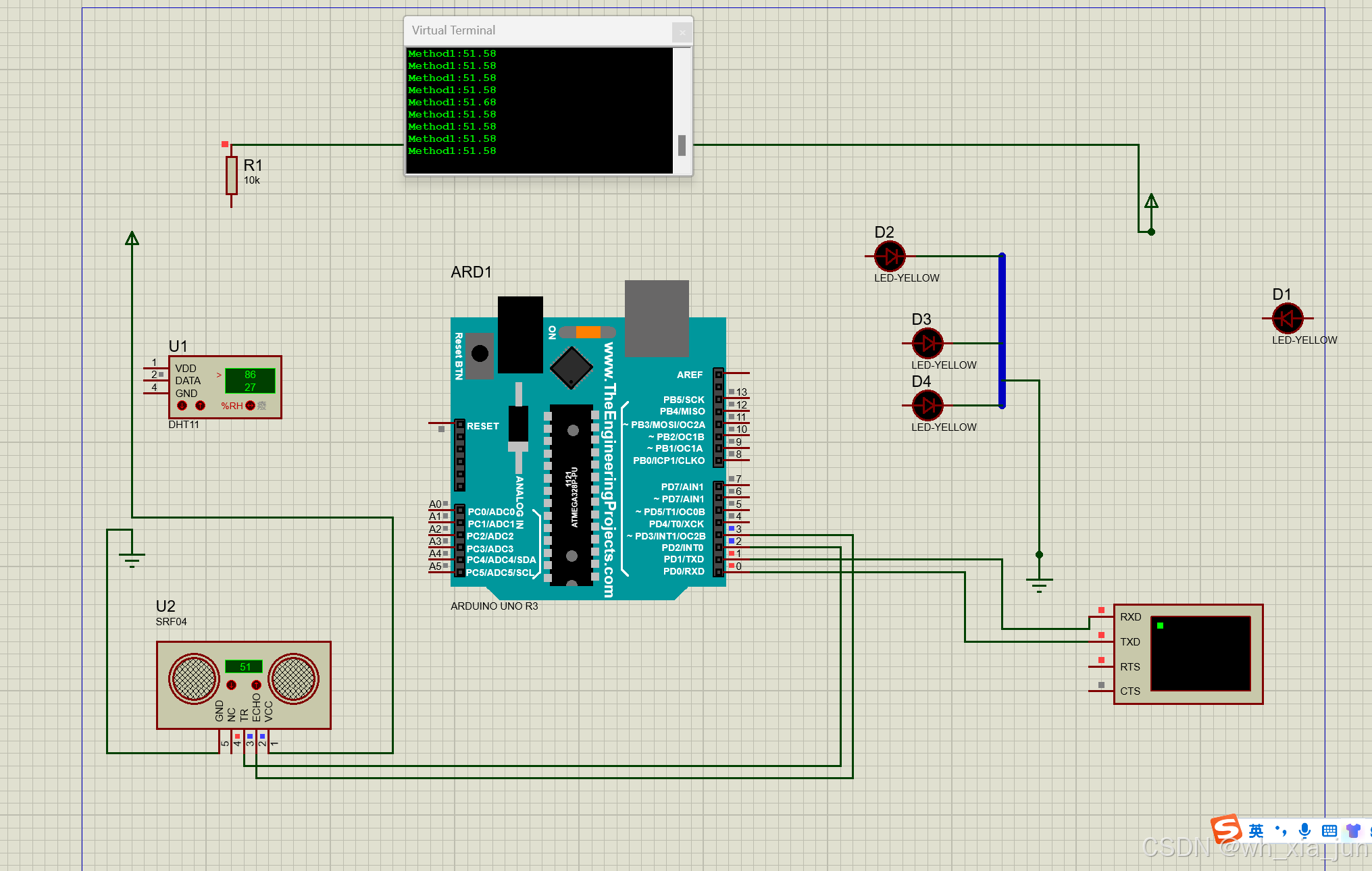
模块具有4个引脚,除了电源外,有TRIG、ECHO两个引脚需要操作:
首先,向TRIG引脚发送一个高电平脉冲,来触发模块输出声波
记录ECHO引脚输出高电平的时间,即声波的飞行时间
距离 = 声速(340m/s) * 声波的飞行时间 ÷ 2


原文链接:https://blog.csdn.net/wh_xia_jun/article/details/139550996
cpp
double dis;
void setup() {
Serial.begin(9600);
pinMode(2, OUTPUT);
pinMode(3, INPUT);
}
void loop() {
pinMode(2, OUTPUT);
digitalWrite(2,LOW);
delayMicroseconds(10);
digitalWrite(2,HIGH);
delayMicroseconds(10);
digitalWrite(2,LOW);
dis = pulseIn(3,1);
dis = dis / 57;
Serial.print("Method1:");
Serial.println(dis);
delay(1000);
}说明:
在Arduino编程中,pulseIn()函数是一个非常有用的函数,用于测量一个引脚上的脉冲持续时间(以微秒为单位)。这个函数通常用于读取来自传感器(如超声波传感器HC-SR04)的脉冲宽度,以计算距离、速度或其他与脉冲持续时间相关的量。
函数pulseIn(pin, value)的参数说明如下:
pin:指定要读取脉冲的Arduino引脚编号。value:指定要测量的脉冲类型。如果value是HIGH(或1),则函数将测量引脚从低电平变为高电平,然后再变回低电平所持续的时间。如果value是LOW(或0),则函数将测量引脚从高电平变为低电平,然后再变回高电平所持续的时间。
在你的代码中,pulseIn(3,1);的调用意味着函数将测量连接到引脚3的信号的上升沿(从低电平到高电平)到下一个下降沿(从高电平到低电平)的持续时间,单位是微秒(μs)。这通常用于与发送脉冲信号的传感器配合使用,如超声波传感器HC-SR04,其中一个引脚用于发送触发脉冲,另一个引脚用于接收回波脉冲。
在你的代码中,这个脉冲的持续时间被用来计算距离(尽管你的代码中并没有直接显示如何使用这个距离值,只是简单地将其除以57并打印出来)。对于超声波传感器HC-SR04,回波脉冲的宽度与测量到的距离成正比。然而,要得到实际的距离值(例如,以厘米为单位),你需要将脉冲宽度(以微秒为单位)除以声速(在空气中大约为340米/秒或34000厘米/秒)除以2(因为声音需要往返),并且可能需要考虑到你的特定传感器和环境的特性进行微调。
因此,你的代码中的dis = dis / 57;这一行可能是基于你使用的传感器和环境的特定校准结果。然而,需要注意的是,这个校准值(57)可能并不适用于所有情况,你可能需要根据自己的设置进行调整。
总结来说,pulseIn(3,1);在你的代码中用于测量连接到引脚3的信号的上升沿到下降沿的持续时间,这通常用于与发送脉冲信号的传感器(如超声波传感器)配合使用。
方法二:
cpp
#include <NewPing.h>
NewPing myNewPing(2,3);
double dis;
void setup() {
Serial.begin(9600);
pinMode(2, OUTPUT);
pinMode(3, INPUT);
}
void loop() {
dis = myNewPing.ping()/57;
Serial.print("Method2:");
Serial.println(dis);
delay(1000);
}说明:
NewPing 不是一个 Arduino 内置的库,而是由社区开发的一个第三方库,用于简化与超声波传感器(如 HC-SR04)的交互。由于 Arduino 官方库可能无法覆盖所有硬件设备和功能,因此社区开发了许多第三方库来扩展 Arduino 的功能。
要使用 NewPing 库,你需要将其包含在你的 Arduino 项目中。这通常通过以下几种方式之一来实现:
-
Arduino IDE 库管理器 :最简单的方法是使用 Arduino IDE 的库管理器来安装
NewPing。在 Arduino IDE 中,转到"工具">"管理库...",然后在搜索框中输入"NewPing"。找到库后,点击"安装"按钮。安装完成后,你就可以在你的代码中包含#include <NewPing.h>来使用它了。 -
手动安装 :如果你没有使用 Arduino IDE,或者出于某种原因需要通过手动方式安装库,你可以从 GitHub 或其他源下载
NewPing库的源代码,并将其解压到你的 Arduino 库目录中。库目录的位置取决于你的操作系统和 Arduino IDE 的安装位置,但通常位于Documents\Arduino\libraries\(Windows)或~/Arduino/libraries/(macOS/Linux)下。 -
ZIP 文件安装 :Arduino IDE 还允许你通过上传 ZIP 文件来安装库。只需下载
NewPing库的 ZIP 文件,然后在 Arduino IDE 中选择"工具">"导入库">"添加.ZIP库...",然后选择下载的 ZIP 文件。
无论使用哪种方法安装,一旦 NewPing 库被添加到你的 Arduino 库目录中,你就可以在任何 Arduino 项目中通过 #include <NewPing.h> 来包含并使用它了。
NewPing 库提供了一系列的方法,如 ping() 和 ping_cm(),用于发送超声波脉冲并接收回波,然后计算并返回距离(以微秒或厘米为单位)。这使得与超声波传感器的交互变得更加简单和直接。