物体实例分割是计算机视觉领域的一个关键任务,它旨在从图像中分割出每个独立物体,并且为每个物体实例提供一个独特的标识。这一任务不仅识别出图像中的物体,还能区分出多个同类物体的不同实例,例如在一张桌子上摆放的多个相同的杯子。
在自主机器人等应用场景中,物体实例分割技术尤为重要。在提供的内容中,使用的技术是UOIS-SAM(无监督物体实例分割-SAM),这是一种针对自主机器人在桌面场景中的应用而设计的数据高效的方法。UOIS-SAM利用了以下两个关键组件:
-
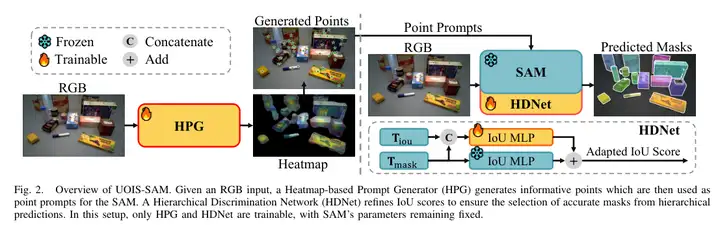
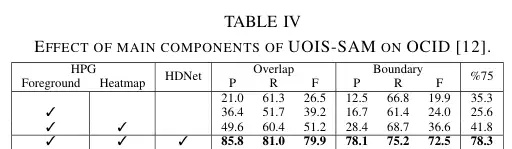
基于热图的提示生成器(HPG):这是一种生成类别不可知的点提示的方法,用于产生精确的前景预测。它帮助系统识别图像中的前景物体,而无需事先知道物体的具体类别。
-
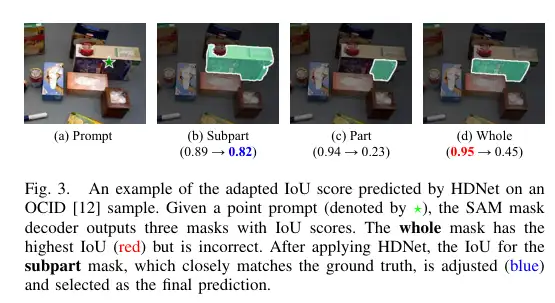
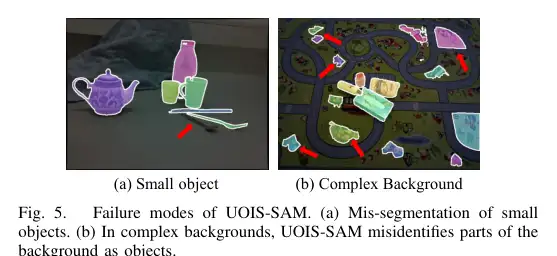
分层判别网络(HDNet):这是对SAM(一种监督学习方法)的掩模解码器进行调整的网络,用于解决背景混淆和过分割等问题。这在处理遮挡和纹理丰富的物体时尤其重要。
物体实例分割在机器人领域的应用非常广泛,尤其是在自主机器人领域:
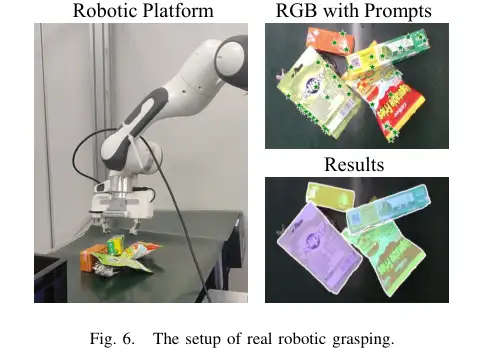
- 机器人拾取:机器人可以准确识别并分辨各种物体,进而进行精确拾取和搬运。这在仓库管理、自动化生产线等场景中极具应用价值。
- 环境理解和交互:通过精确的物体实例分割,机器人能更好地理解其操作环境,与环境中的物体进行有效交互。
- 导航和规划:准确的物体实例分割帮助机器人在复杂环境中进行更好的路径规划和避障。
物体实例分割技术能够显著提升机器人的自主性和效率,使其在各种实际应用场景中表现更加出色。在桌面场景中,这种技术能够帮助机器人更好地识别和操作各种小型物体,这对于实验室自动化、精密组装等领域尤其重要。
论文作者:Rui Cao,Chuanxin Song,Biqi Yang,Jiangliu Wang,Pheng-Ann Heng,Yun-Hui Liu
作者单位:The Chinese University of Hong Kong
论文链接:http://arxiv.org/abs/2409.15481v1
内容简介:
1)方向:物体实例分割
2)应用:自主机器人在桌面场景中的无监督物体实例分割
3)背景:以往的方法需要在大规模桌面数据集上进行全面监督以进行有效的预训练。
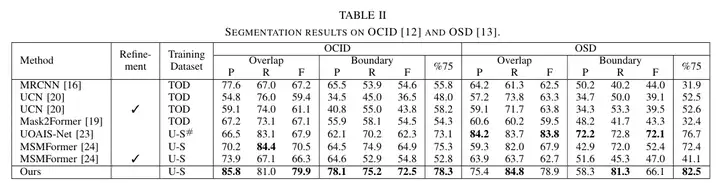
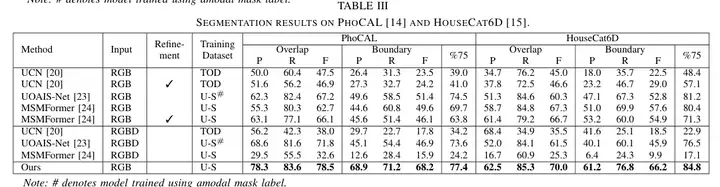
4)方法:本文提出了UOIS-SAM,一种数据高效的解决方案,利用SAM的高准确性和强泛化能力。UOIS-SAM集成了两个关键组件:(i)基于热图的提示生成器(HPG),用于生成具有精确前景预测的类别不可知的点提示;(ii)分层判别网络(HDNet),该网络调整了SAM的掩模解码器,减轻了SAM基线引入的问题,如背景混淆和过分割,特别是在涉及遮挡和纹理丰富的物体的情况下。
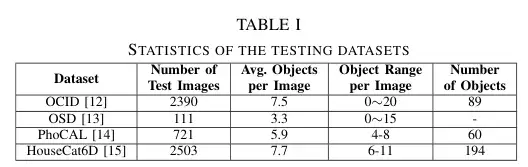
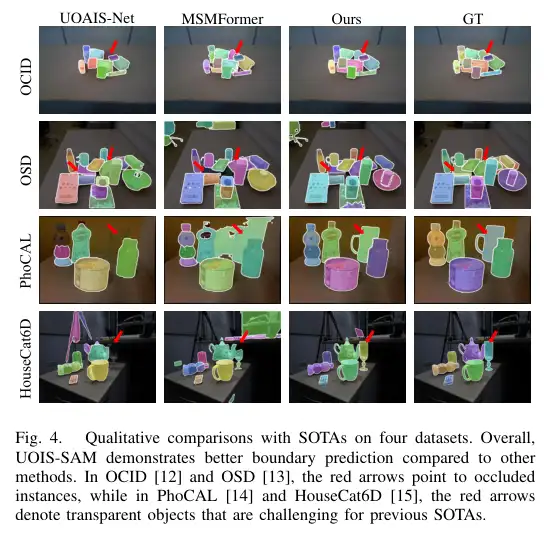
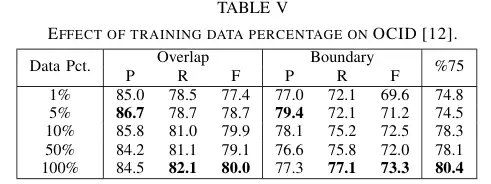
5)结果:在OCID、OSD以及包括PhoCAL和HouseCat6D在内的额外光度挑战数据集上进行了大量实验,结果表明,即使与以往方法相比仅使用10%的训练样本,UOIS-SAM在看不见物体分割方面实现了最先进的性能,在各种桌面场景中展现出其有效性和稳健性。