无人机在复杂弧形(如隧道)退化场景中的SLAM(同时定位与地图构建)技术,结合单目相机、激光雷达(LiDAR)和惯性测量单元(IMU)时,能够显著提升定位与建图的准确性和鲁棒性。以下是对该技术的详细解析:
一、技术背景与概述
在无人机进行隧道等复杂弧形场景的探索时,由于环境特征单一、光线变化大、GPS信号受限等因素,传统的定位方法往往难以满足需求。此时,结合单目相机、激光雷达和IMU的SLAM技术成为了一种有效的解决方案。该技术通过多传感器融合,能够综合利用各传感器的优势,实现高精度的定位和建图。

二、技术组成与原理
- 单目相机
单目相机通过捕获环境图像,提取特征点,并跟踪这些特征点在不同帧中的位置变化,从而估计相机的运动和构建环境的三维地图。然而,单目相机无法直接测量深度信息,需要通过运动中的三角测量来求解相机运动并估计像素的空间位置。这使得单目相机在静止或仅进行旋转运动时无法准确估计深度。
- 激光雷达
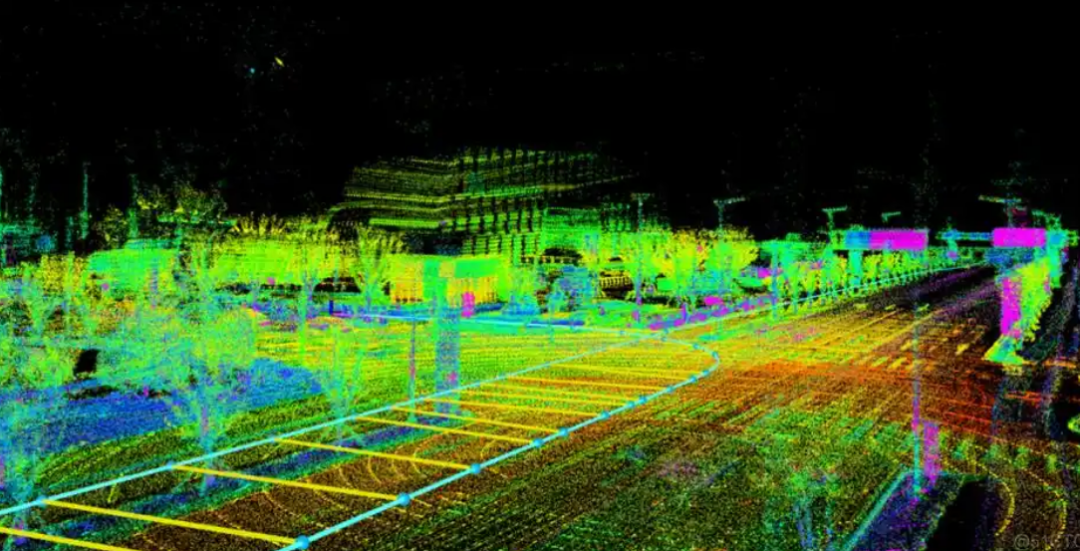
激光雷达通过发射激光束并接收反射光来测量周围环境的距离和形状,提供高精度的点云数据。这些数据可以用于构建三维地图和实现精确的定位。在复杂弧形场景中,激光雷达能够有效克服光线变化和特征单一的问题,提供稳定的定位信息。
- 惯性测量单元(IMU)
IMU集成了加速度计和陀螺仪等传感器,能够测量无人机的加速度和角速度。通过与激光雷达和单目相机的数据融合,IMU可以进一步提高定位的精度和鲁棒性。IMU的数据可以用于预测无人机的运动状态,并在激光雷达和单目相机数据更新时进行修正。
三、技术实现与算法
在无人机单目+激光+IMU的SLAM系统中,通常采用紧耦合的方式将多传感器数据进行融合。这种方式能够充分利用各传感器的数据优势,提高系统的整体性能。具体实现时,可以采用以下算法:
- 特征提取与匹配
从单目相机图像中提取特征点,并与激光雷达的点云数据进行匹配。通过特征点的匹配关系,可以估计相机与激光雷达之间的相对位姿。
- 运动估计与优化
结合IMU的数据预测无人机的运动状态,并利用激光雷达和单目相机的观测数据进行修正。通常采用扩展卡尔曼滤波器(EKF)或迭代扩展卡尔曼滤波器(IEKF)等算法对无人机的位姿进行估计和优化。
- 地图构建与更新
根据估计的无人机位姿和传感器数据,构建并更新环境的三维地图。地图的构建可以基于点云数据或网格地图等不同形式。
四、技术优势与挑战
优势:
高精度:结合多传感器数据,能够实现高精度的定位和建图。
鲁棒性:在复杂弧形场景中,能够有效克服光线变化和特征单一的问题。
实时性:通过高效的算法实现实时定位和建图。
挑战:
传感器校准:多传感器之间的校准是确保系统性能的关键。
计算复杂度:多传感器数据融合需要较高的计算能力。
环境适应性:在不同环境下,系统的性能和稳定性可能受到影响。
五、应用实例与展望
无人机单目+激光+IMU的SLAM技术已经在隧道勘探、地下空间测绘等领域得到应用。未来,随着传感器技术和算法的不断进步,该技术有望在更多复杂场景中实现高精度、鲁棒性强的定位和建图,为无人机的自主导航和智能决策提供更加坚实的基础。
综上所述,无人机单目+激光+IMU复杂弧形(隧道)退化场景SLAM技术通过多传感器融合的方式,实现了高精度的定位和建图。该技术具有广泛的应用前景和重要的研究价值。