导读:
文章设计了一款适用于无人机载高性能成像的曲面复眼相机系统,兼具大视场、高分辨率和小型化特点。系统由曲面子眼阵列、中继转像系统和平面接收器组成,子眼焦距为12 mm,半视场角为6˚,中继转像系统焦距为8 mm,搭载像元尺寸为3.75 μm的传感器。中继转像系统的引入使得各子眼参数完全一致,并将曲面子眼阵列的曲面像转化为便于平面接收器接收的平面像。系统总视场达到112˚,体积仅为60 mm × 60 mm × 72 mm,F数为3.5,焦距为3.75 mm。在对地距离500 m的高空拍摄时,地面分辨率达到0.5 m。仿真结果表明,系统各视场子眼在奈奎斯特截止频率处的MTF值均大于0.3,并满足光学成像系统公差表"Q5"等级要求。最后经过仿真分析验证,系统在−20℃至50℃温度区间内可以正常工作。与现有无人机载相机系统相比,该设计在实现更大视场和更高地面分辨率的同时大幅减小了系统体积,为无人机载相机的高性能成像提供了创新解决方案。
作者信息:
张殊悦:上海理工大学光电信息与计算机工程学院,上海;中国科学院上海微系统与信息技术研究所仿生视觉系统实验室,上海;朱冬晨, 李嘉茂*:中国科学院上海微系统与信息技术研究所仿生视觉系统实验室,上海
正文:
本文聚焦于无人机载相机对大视场、高分辨率及小型化的需求,研究在小型化设计的前提下如何兼顾大视场与高分辨率的性能优化。
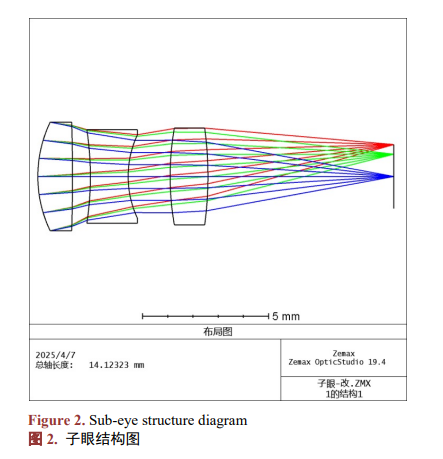
子眼由三块镜片构成,图2和图3分别展示了优化后子眼的结构;点列图及调制传递函数(Modulation Transfer Function, MTF)图。
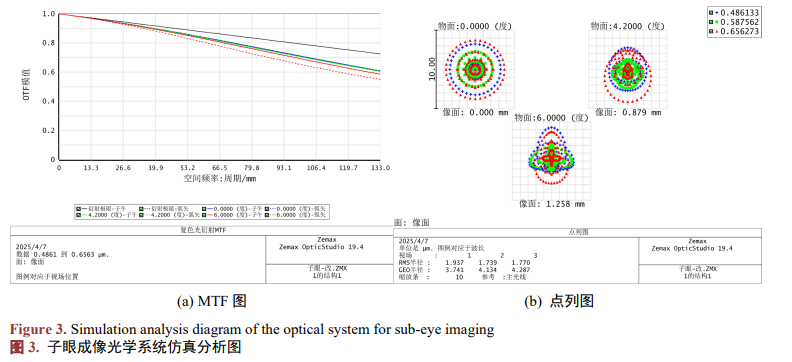
经过仿真分析,从图3(a)可看出MTF截止频率处的值均大于0.3,且子眼各视场的RMS半径均小于单个像元尺寸,能够满足光学成像系统与接收器的匹配要求。
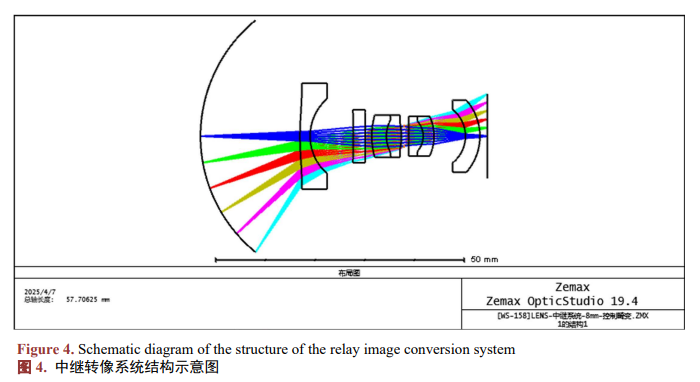
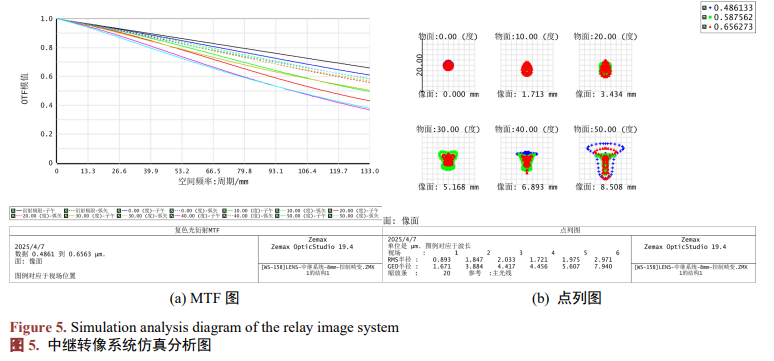
经过仿真优化分析,图4展示了中继系统的结构图,图5则展示了中继系统的成像质量。
从图5(a)看出中继转像系统的MTF在截止频率处的值均大于0.3,且各视场RMS半径值均小于像素尺寸,满足光学成像系统与接收器的匹配要求。
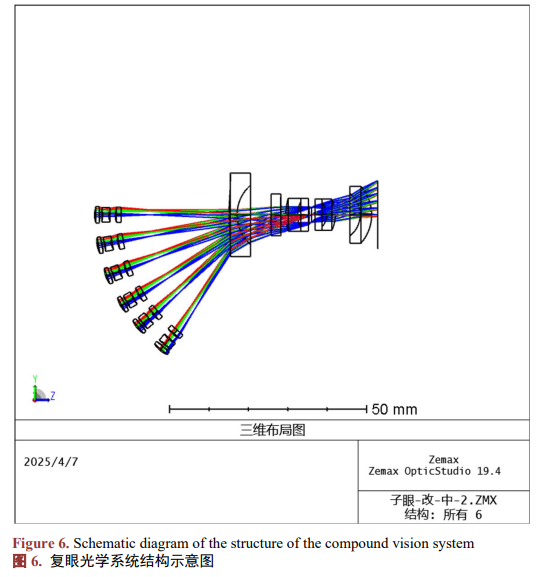
拼接后的复眼光学系统主阵列如图6所示:
本文选用"几何MTF平均"的公差评价方法,用"灵敏度"模式,"蒙特卡洛运行数"选择"200",根据光学成像系统公差表Q5等级对系统边缘结构进行公差分析。从结果可以看出大多数样品的MTF截止频率处的值大于0.15,满足设计指标。
经过Zemax无热化仿真分析验证,该系统在温度范围为−20℃至50℃时,成像质量稳定。
结论
本文设计了一款适用于无人机的小型化、大视场、高分辨率曲面复眼相机系统,通过适配转像系统将曲面子眼阵列形成的焦曲面像转化为平面像,便于接收器接收。经拼接与系统优化后,系统总体积为60 mm × 60 mm × 72 mm,焦距为3.75 mm,满足对地距离500 m实现0.5 m地面分辨率的要求。系统全视场在奈奎斯特截止频率处的MTF值高于0.3,子眼全视场RMS半径小于像元尺寸,畸变值小于4%。公差分析结果表明,系统经过合理的公差分配后,90%的样品在截止频率处的MTF值仍高于0.15,成像质量良好。无热化分析结果表明,系统在−20℃至50℃的温度范围内成像质量稳定。该系统结构简单、加工难度低,可广泛应用于大视场成像、军事目标探测与识别、导航定位等多个领域。
原文链接: 无人机载小型大视场高分辨率曲面复眼镜头设计
基金项目:
国家自然基金青年基金(62303441);中国科学院青年创新促进会(2021233);上海市优秀学术带头人 (22XD1424500)。