(2024_10_22)
下载文件

在文件夹 swrc135b \ ide \ srf05_cc2530 \ iar 下的 light_switch.eww 文件打开它

修改程序
ZigBee模块(网关节点)上有2个按键和4个LED灯,其中按键SW1和SW2分别由
P1.2和P1.6控制,LED1~LED4灯分别由P1.0、P1.1、P1.3和P1.4控制,如图3-2所示。
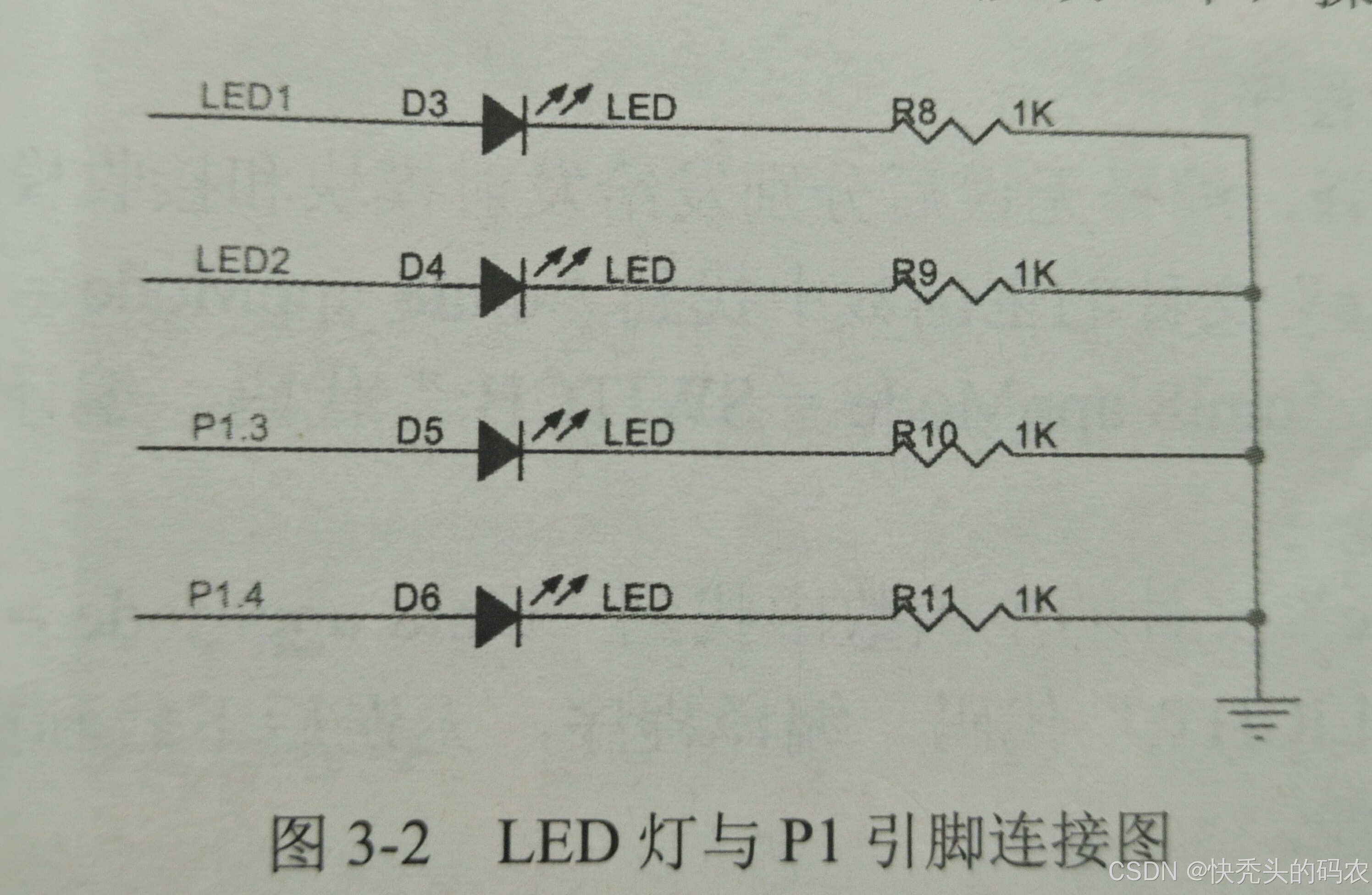
这些接口与TI官网发布的开发平台有所差别,所以需要修改一下,操作方法如下。
打开文件
(hal_board.h)
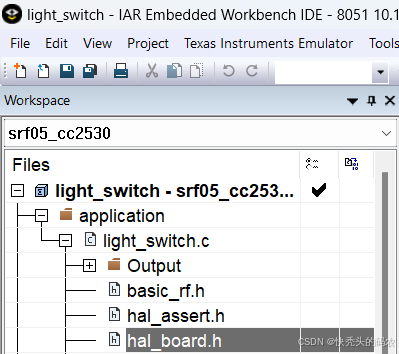
在文件中找到如图的位置
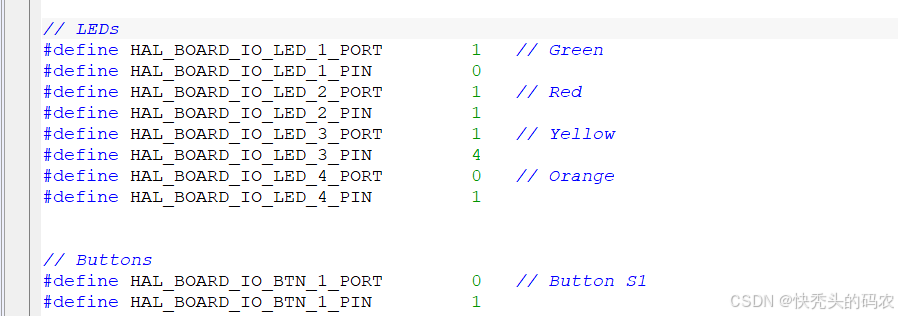
改为如下图的参数
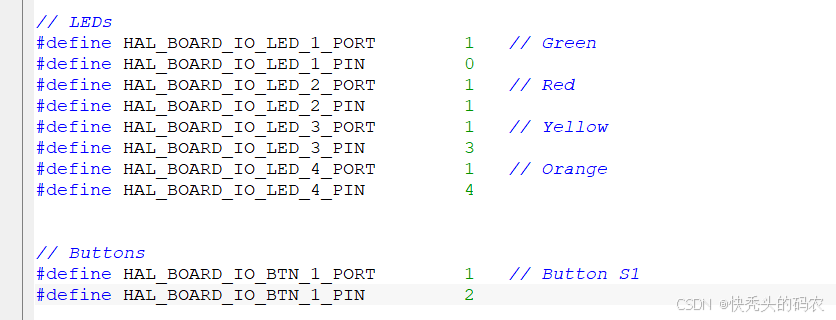
解释
#define HAL_BOARD_IO_LED_x_PORT 1 // Orange //表示端口
#define HAL_BOARD_IO_LED_y_PIN 4 //表示引脚
上面表示 ( P1_4 )
找到 light_switch.c 文件
在上面的文件中找到 static void appSwitch() 函数在此函数中找到
cpp
if( halJoystickPushed() ) {判断将其注释 并改为如下代码
cpp
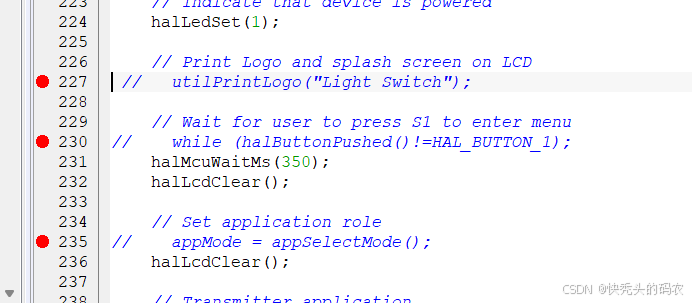
if(halButtonPushed()==HAL_BUTTON_1){在找到 main 函数在此函数中注释一些代码
注释1:utilPrintLogo("Light Switch");
 注释后:
注释后:

注释2:
注释后
注释3:

注释后

3个注释后的完整部分
实现烧写程序
记得把环境配置一下
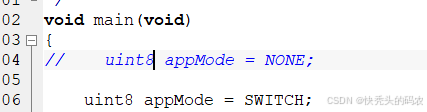
回到主函数中找到( uint8 appMode = NONE; ) 的定义将其注释

在其下面编写如下代码
cpp
uint8 appMode = SWITCH;下载到发射模块中
准备下载下一块板子
接收模块
将上面的 uint8 appMode = SWITCH; 参数修改一些 下面为修改后的
cpp
uint8 appMode = LIGHT;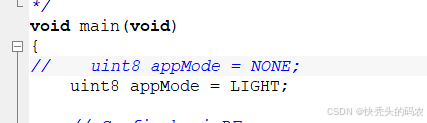
即可完成