目录
一、UR通信端口
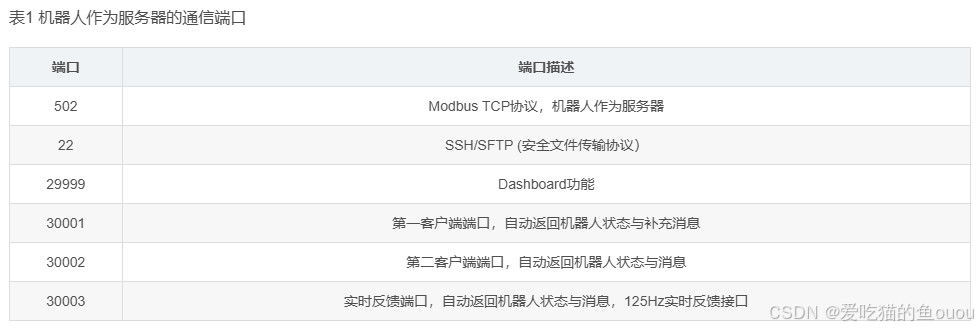

二、电脑(客户端)连接协作机器人(服务端)
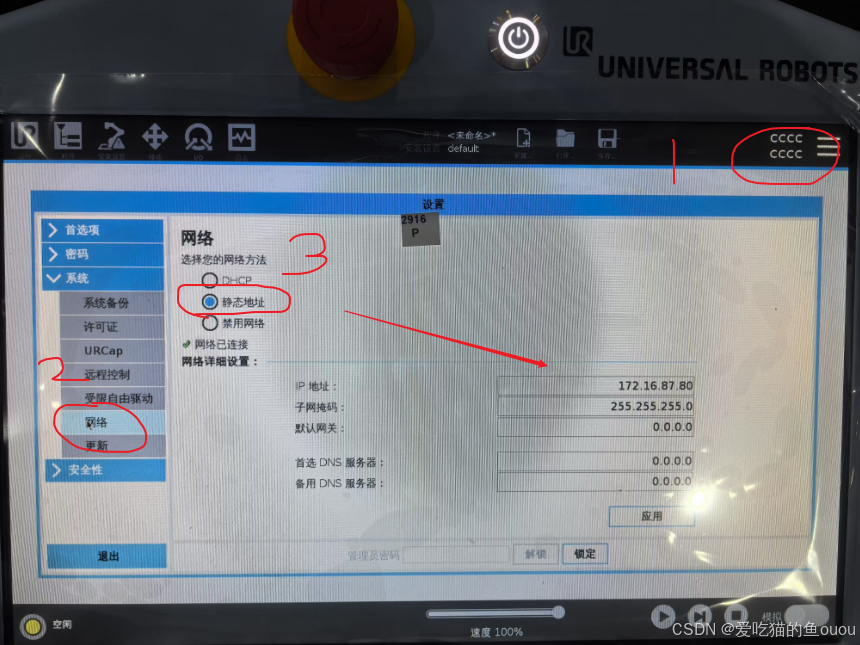
1.设置网络方法
启动实体示教器,找到右上角:设置→系统→网络,选择第二个复选框静态地址。
设置静态地址,保证与电脑的IP地址同一网段,例如将机器人的IP设置为:172.16.87 .80(电脑IP为:172.16.87.88)。
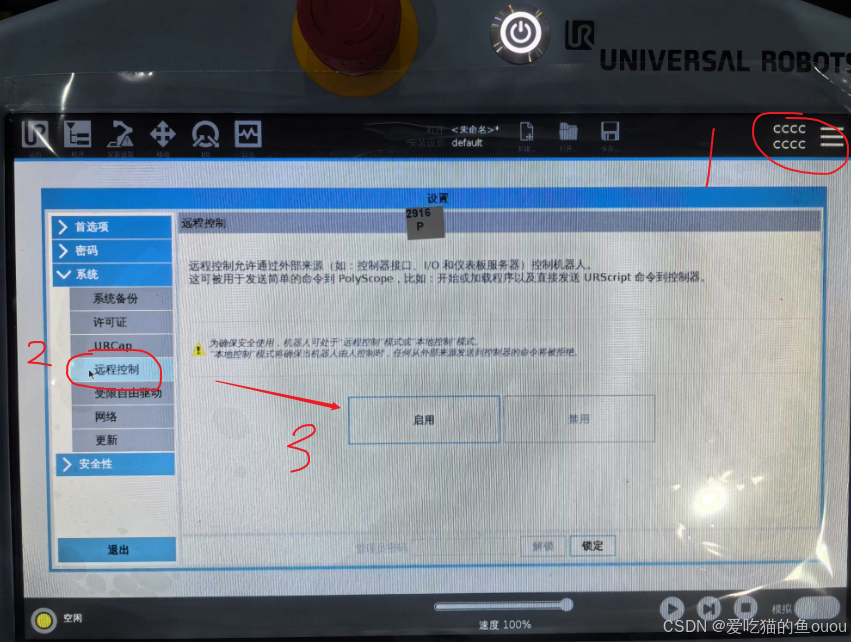
2.检查设置
非必须,但是****新机需要特别注意检查这两项。
第一项开启远程控制:设置→系统→远程控制,选择启用。
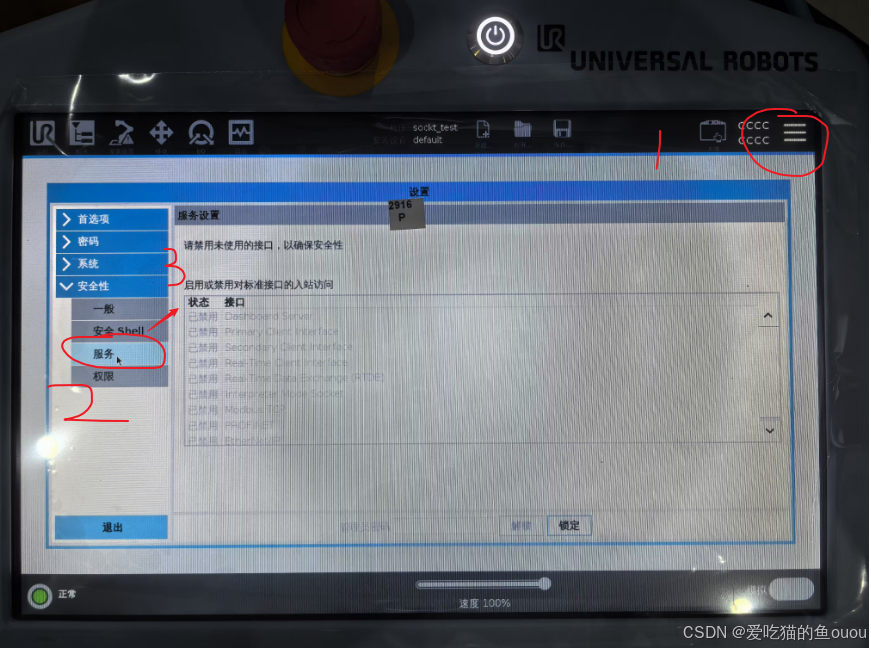
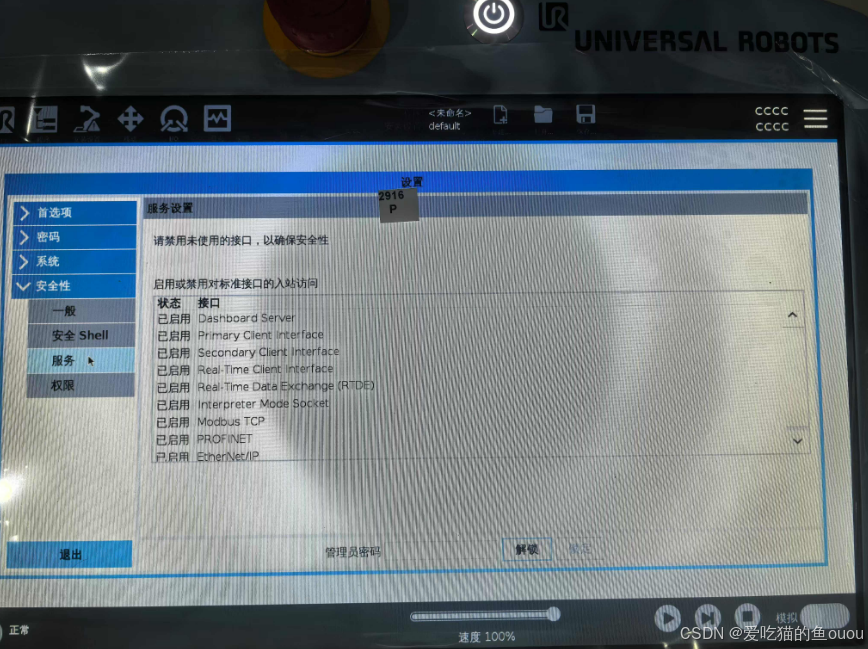
第二项启用端口权限:设置→系统→服务,启用端口的权限(这里全启用了)。
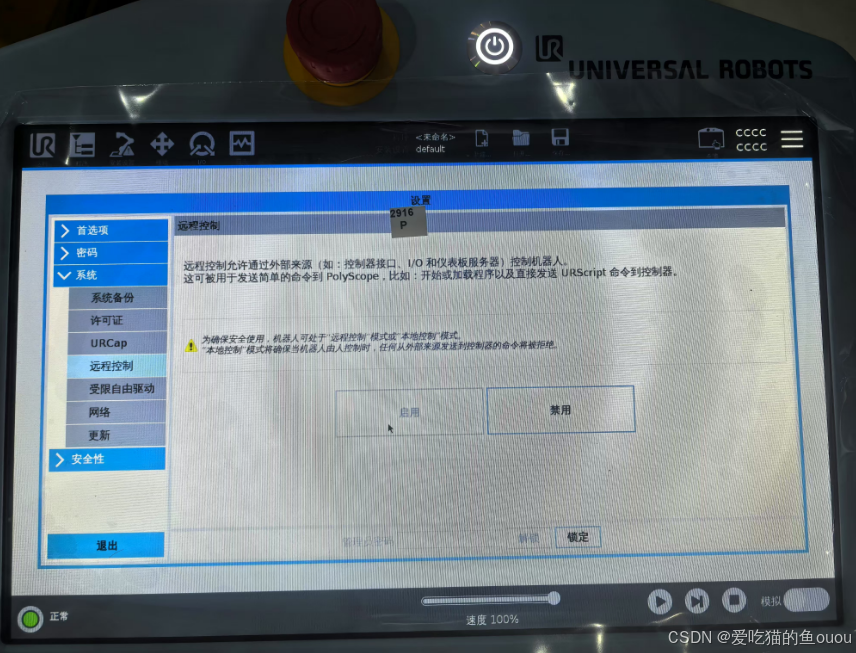
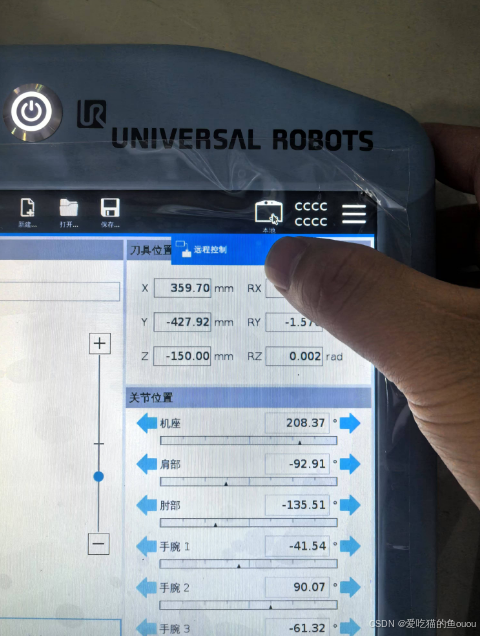
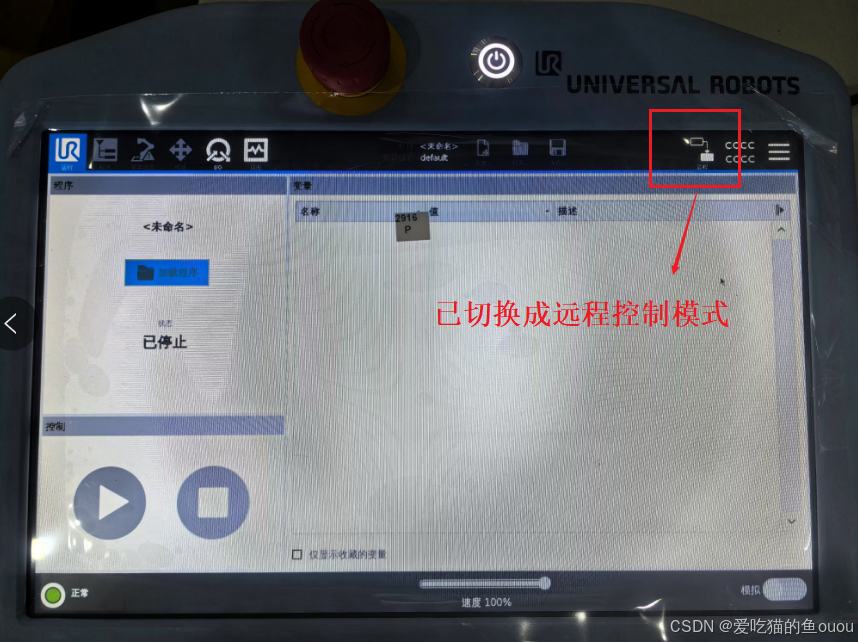
3.示教器切换远程控制(注)
找到右上角:本地→远程控制。
4.客户端与协作机器人建立连接
利用网络调试助手(或上位机)作为客户端,填写机器人ip,通过30001/30002/30003其中一个特定的编程端口,与协作机器人建立连接。就可以在网络调试助手(或上位机)上按照URScript语言格式编写脚本程序,直接发送给机器人控制器,机器人就可以执行相应动作。
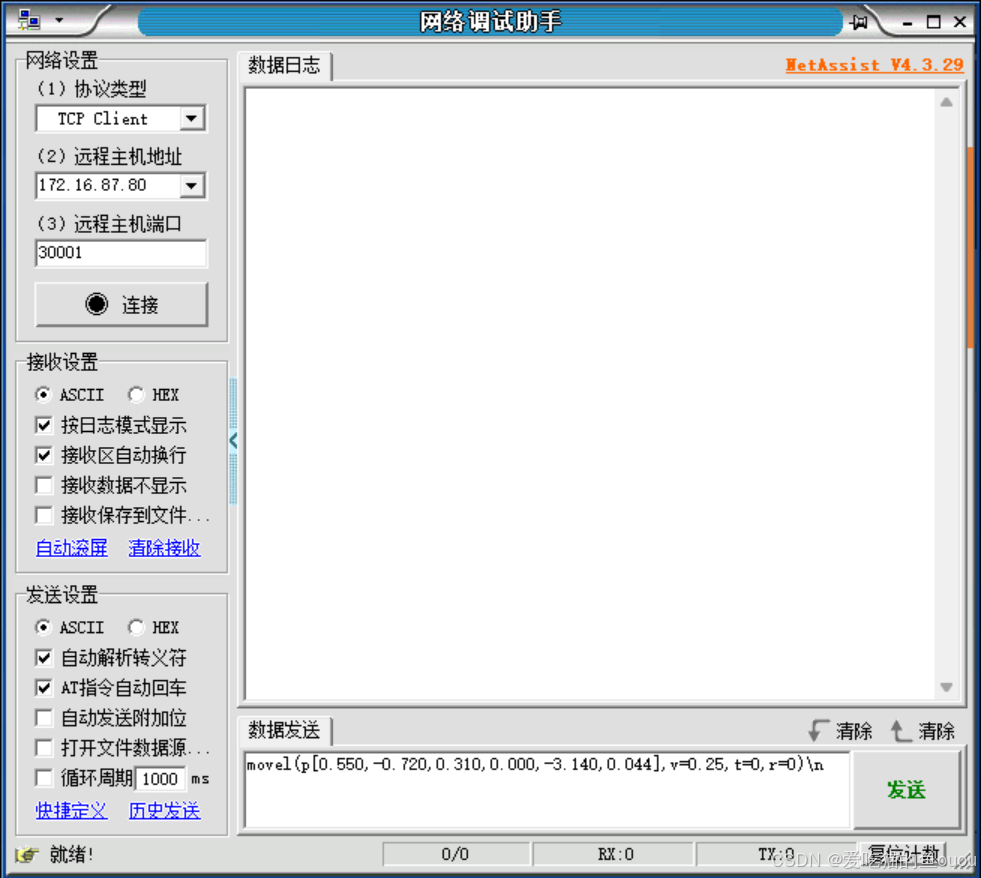
5.连接测试
在输入框内输入movel(p0.550,-0.720,0.310,0.000,-3.140,0.044,v=0.25,t=0,r=0)\n**(注:位置单位均为m,角度单位均为弧度,速度单位为m/s,加速度单位为m/s2。指令后面必须加回车换行,即"\n"。)**
注:参数根据实际定,防止撞击危险,注意安全。
movel(p[0.550,-0.720,0.310,0.000,-3.140,0.044],v=0.25,t=0,r=0)\n机器人就会根据指令进行运动,至此完成了连接的测试。
三、电脑(服务端)连接协作机器人(客户端)
1.设置网络方法(同上)
2.检查设置(同上)
3.在示教器上编写程序(注)
利用示教器编程socket代码,socket_open函数的IP参数填写电脑的172.16.87.88、端口号参数填写电脑设置的,这里用7070。
程序
变量设置
开始前
connection≔ False
send_data≔"connection successful"
循环 connection≟ False
connection=socket_open("172.16.87.88",7070,"socket_1")
socket_send_string(send_data,"socket_1")
机器人程序4.服务端与协作机器人建立连接
利用网络调试助手(或上位机)作为服务端,填写电脑ip:172.16.87.88、端口号:7070,与协作机器人建立连接。
5.连接测试
运行示教器socket程序,连接成功后,网络调试助手收到connection successful。