随着自动驾驶技术的发展,车道线识别和前车检测成为智能驾驶系统中的核心技术之一。本实训报告围绕基于计算机视觉的车道线识别与前车检测系统展开,旨在通过处理交通视频数据,实时检测车辆所在车道及其与前车的相对位置,从而为车道偏离预警和前车碰撞预警提供支持。
系统主要由车道线识别模块和前车检测模块构成。车道线识别通过使用图像处理与机器学习方法(如ACF检测器),检测车辆所在的车道及车道边界;前车检测则通过视频帧中的车辆定位框,结合车辆位置、速度等信息,判断前车的距离与运动状态。此外,系统还实现了基于鸟瞰图的车辆定位与车道标记识别,为车辆行驶安全提供有效保障。
实验结果表明,系统能够准确识别不同条件下的车道线及前车信息,具有较高的准确性和实时性,能够为自动驾驶系统提供关键的环境感知能力。本项目的研究与实现为智能驾驶领域中的车道保持与碰撞预警系统提供了有效的技术支持。
算法流程

运行效果
运行 main.m
图1:原始视频帧显示

内容:这是原始摄像头视角下的道路场景,呈现了自然环境中的车辆和车道。
细节:
(1)红色线条标注了左侧车道线。
(2)绿色方框表示检测到的前方车辆,并显示了车辆的位置(X=9.90, Y=1.62),单位可能为米。
(3)图像清晰地展示了道路、天空和周围环境,提供了基础数据供后续处理。
目的:展示原始视频数据和初步的车辆检测结果,提供输入图像。
图2:鸟瞰图原始分割:

内容:这是从普通摄像头视角转换到鸟瞰视角后的图像,车道线的初步分割结果。
细节:
(1)蓝色线条表示检测到的车道线特征。
(2)黄色方框标注了感兴趣区域(ROI),该区域用于进一步分析车道线。
(3)图像已经转为灰度格式,为后续处理提供简化的视觉信息。
目的:展示图像从摄像头视角到鸟瞰图的转换过程,以及初步的车道线分割结果。灰度图和ROI标注为后续的车道检测做准备。
图3:车道线拟合结果
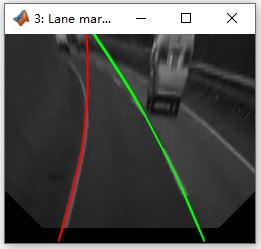
内容:同样是鸟瞰视角,展示了车道线的最终拟合结果。
细节:
(1)红色线条表示拟合后的左侧车道线。
(2)绿色线条表示拟合后的右侧车道线。
(3)图像展示了车道线拟合的最终结果,车道线已经被有效识别和标记。
目的:展示车道线拟合的精确结果,标示出车道的边界,帮助实现车辆定位和路径规划。
这三张图清晰地展示了整个车道检测和车辆定位系统的处理流程:
(1)原始图像采集和车辆检测:通过摄像头获取道路场景,检测到车辆并标注其位置。
(2)图像转换到鸟瞰视角并进行车道线特征提取:将原始图像转换为鸟瞰图,提取车道线的特征,并标记感兴趣区域。
(3)车道线拟合和最终结果标注:对车道线进行数学模型拟合,得到最终的车道边界,便于后续的驾驶决策。
系统成功实现的功能:
(1)准确的车辆检测和定位:通过边界框准确定位车辆的位置。
(2)稳定的车道线检测:从鸟瞰视角中检测到稳定的车道线特征。
(3)从普通视角到鸟瞰图的转换:实现了将图像从普通摄像头视角转换为鸟瞰视角的过程。
(4)车道线的数学模型拟合:通过拟合算法精确地表示车道线,提高车道检测的准确性。
通过这些步骤,系统能够实现精确的车道检测和车辆定位,为自动驾驶或辅助驾驶系统提供可靠的数据支持。