连上PC机上的USB网卡配置
首先打开Windows设备管理器,截图记录下当前的网络适配器,作为插上USB网卡后的对比:


然后打开"更改适配器选项",也截张图,作为插上USB网卡后的对比:


插上USB网口,然后再看设备管理器,与之前的截图进行对比:


这里要注意:如果插上USB网卡后没有多出来网络适配器,怎么办?一般情况下换个USB接口就好了,比如我第一次插我主机第1排USB口中靠非主板一侧的USB口就没有反应,但是插第1排USB口中靠主板一侧的USB口就有反应了。
接下来设置这个网卡的IP:



这样就把连接于PC机上的USB网卡设定好了。
设置VMware中的Ubuntu的桥接网卡
设置前请先保证VMware中的Ubuntu添加了桥接网卡,具体方法如下:
https://blog.csdn.net/wenhao_ir/article/details/144321370
Windows搜索"虚拟网络编辑器",




接下来启动Ubuntu
然后左下角菜单调出Settings


从图中我们可以看出有两个以太网口,一个是ens33 ,另一个是ens38,显然ens33是NAT网口,处于连接状态,而ens38因为我还没有用网线将开发板和USB网口连接起来,所以处于网线拔出的状态,这种情况你点击那个开关想打开它也是没有用的,我们可以先把其IP设置好,点击旁边的设置按钮:

192.168.5.11
255.255.255.0
192.168.5.1
这样Ubuntu中的网卡也设置好了
设置开发板的IP
设置方法见 https://blog.csdn.net/wenhao_ir/article/details/144408573
开发板、Windows系统、VMware中的Ubuntu三者互Ping测试
首先把网线连接上:

然后检查下PC上的网卡设置好没有,有时候插上网线后之前的设置没有了,像我这次就没有了:

重新设置下吧:
通过上面的设置,三个的IP如下:
windows ip:192.168.5.10
Ubuntu ip:192.168.5.11
开发板 ip:192.168.5.9
01-Windows向开发板和Ubuntu发Ping包
bash
ping 192.168.5.9
ping 192.168.5.11 没有问题:

02-开发板向Windows和Ubuntu发包
bash
ping 192.168.5.10
ping 192.168.5.11 
没有问题
03-Ubuntu向开发板和Windows发包
bash
ping 192.168.5.9
ping 192.168.5.10 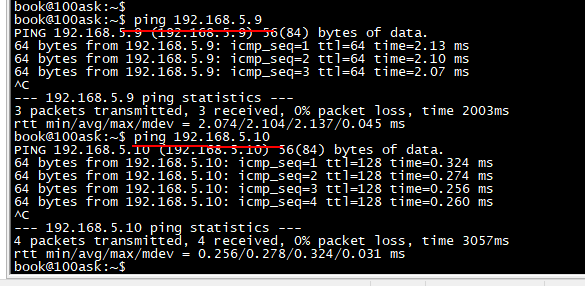
没有问题~