本文介绍了 sherlock 连接相机时的插件使用。通过本套插件可连接海康的工业相机。
**一.环境配置
- 拷贝动态库**
在用户安装 MVS 目录下按照如下路径 Development\ThirdPartyPlatformAdapter 找到目
录为 DalsaSherlock 的文件夹,根据 Sherlock 版本找到对应的 UsrAcqDrv.dll,将其
拷贝到相应目录下 C:\Program Files (x86)\Teledyne DALSA\Sherlock\Drivers,视安
装目录而定(如果是 64 位,则拷贝到 64 对应目录)。

2. 相机环境配置
打开 MVS,若 PC 与相机不在同一网段,则配置下 IP,设置好相机参数。确保相机能在
MVS 上正常取流。
3. 相机驱动配置
打 开 Sherlock 菜 单 栏 中 : 选 项 - 采 集 -Sample driver ( 英 文 版 本 :
Options-Acquisition-Sample driver),选为 Enabled。设置完成后,关闭 Sherlock,重
启生效。

4. 相机配置
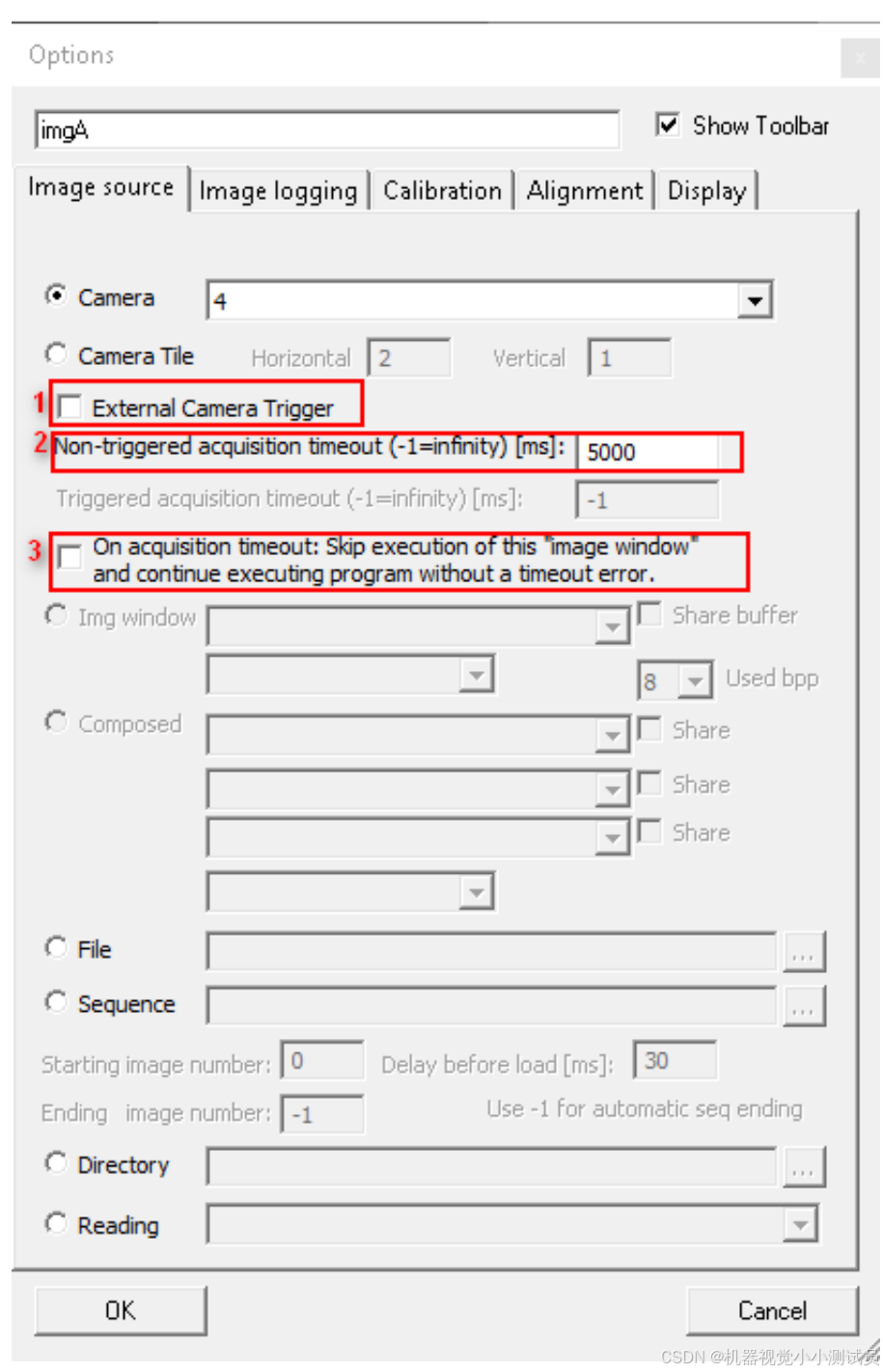
(1) 设置是否开启触发模式。菜单栏中:图像窗口-选项(英文版本:Image
window-Options),通过是否勾选 1 来设置时触发模式还是连续模式(未勾选
时对应连续模式,勾选时对应触发模式 line0);2 处用于连续模式超时时间设
置;不管是连续模式还是触发模式,3 处的勾必须勾选。
(2) 设置相机的 IO 输出。菜单栏中:View-勾选 Digital Outputs 使 sherlock 的右
下角显示相机的 IO 输出情况,当 IO 输出为 on 时相机输出 IO 信号(对应为勾
选相机的 line inverter 参数);当 IO 输出为 off 时相机不输出 IO 信号(对
应为不勾选相机的 line inverter 参数)。
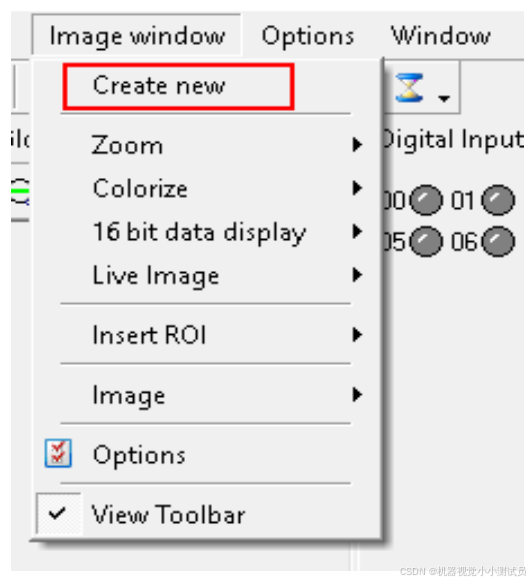
(3) 支持 sherlock 内部开启多个相机操作。菜单栏中:图像-新建 可开启新窗口。
右键新窗口图像,选择 Camera 可选择新窗口所需的取流相机。

二.打开多个 Sherlock
1.设置 Drivers.ini 文件
在路径 C:\ProgramData\Teledyne DALSA\Sherlock\Drivers 下找到 Drivers.ini,打开
Drivers.ini 文件,将文件中的 Sample driver 这个驱动中的 ENABLE 设置成 1,保存关闭。
注意:ProgramData 文件夹默认被隐藏,需要将隐藏文件夹显示出来才能找到相应路径。
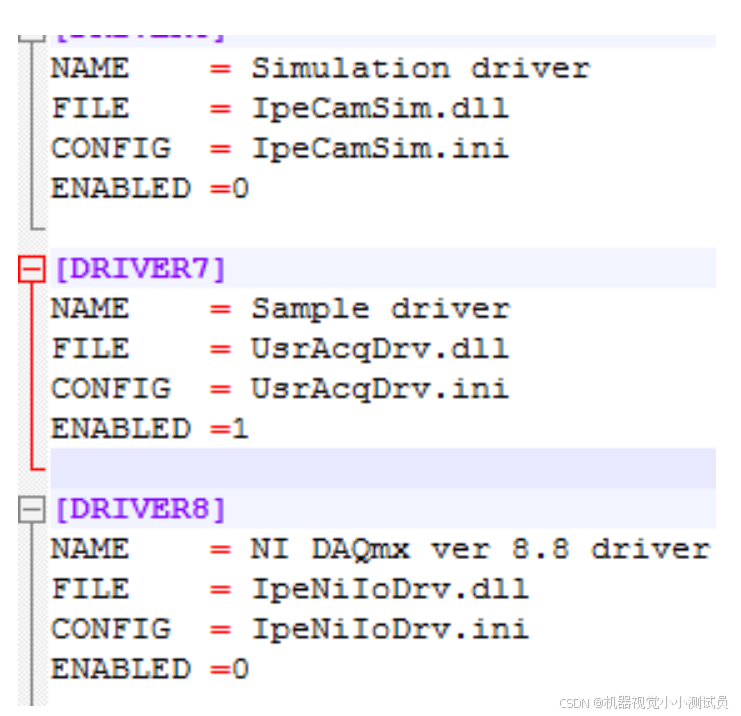
2.复制 Driver1.ini 和 Drivers2.ini 文件
复制上面的 Drivers.ini 文件两份,放在 Drinvers.ini 同一目录,分别命名为
Driver1.ini 和 Drivers2.ini,并将文件中的 Sample driver 这个驱动分别编辑为下图所
示,注意驱动中的 ENABLE 设置成 1,保存关闭。

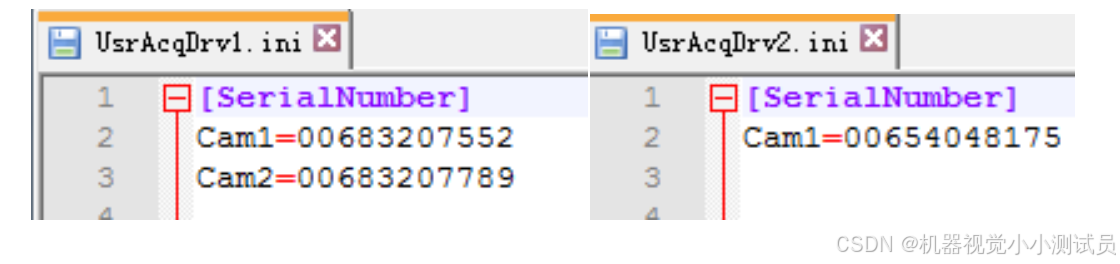
3.新建 UsrAcqDrv1.ini 和 UsrAcqDrv2.ini 文件
在 C:\Program Files (x86)\Teledyne DALSA\Sherlock\Bin 路 径 下 新 建 两 个 文 件
UsrAcqDrv1.ini 和 UsrAcqDrv2.ini(这两个文件名字要与步骤 2 中 Divers1.ini 和
Drivers2.ini 中的 CONFIG 那一行相对应),填入需要打开相机的序列号(SN 号),单个
ini 文件最多可填入 16 个相机,从 Cam1 到 Cam16,保存关闭。
4.保存 MyTest.ivs 文件
打开 Sherlock 软件,选择主菜单 Program->Save As,设置文件名为 MyTest.ivs, 保存路
径为 C:\Program Files (x86)\Teledyne DALSA\Sherlock\Bin,保存,然后关闭 Sherlcok
软件。
5.新建 Cam1.bat 和 Cam2.bat 文件
在 C:\Program Files (x86)\Teledyne DALSA\Sherlock\Bin 路径下新建两个文件 Cam1.bat
和 Cam2.bat,将 Cam1.bat 编辑为:
start "" "C:\Program Files (x86)\Teledyne DALSA\Sherlock\Bin\IpeStudio.exe"
-acq:Drivers1.ini -load: MyTest.ivs
将 Cam2.bat 编辑为:
start "" "C:\Program Files (x86)\Teledyne DALSA\Sherlock\Bin\IpeStudio.exe"
-acq:Drivers2.ini -load: MyTest.ivs
注意:
(1)这里的 C:\Program Files\Teledyne DALSA\Sherlock\Bin 是 win7 32bit 环境下
sherlock 的安装路径,如果是 win7 64bit,这里应该写 C:\Program Files\Teledyne
DALSA\Sherlockx64\Bin;
(2)ini 和 ivs 文件名字都要前面的命名对应;
6.双击.bat 文件
双击 Cam1.bat,可以打开一个 sherlcok 连接相机 1 和相机 2,双 击 Cam2.bat,可以打
开第二个 sherlcok 连接相机 1。如果想要改变连接的相机,只需修改 UsrAcqDrv*.ini 中
的序列号即可。
注意:UsrAcqDrv*.ini 文件如果不存在或者 UsrAcqDrv*.ini 文件中的关键字 Cam*不存在,
则会默认枚举到所有相机。