写在前面
-
本文内容
本文所属《从零开始跑通3DGS教程》系列文章,将对colmap docker环境部署、使用进行说明
-
平台/环境
linux, nvidia GPU, docker
-
转载请注明出处:
目录
系列文章
-
数据(采集):
从零开始跑通3DGS教程:(一)数据(采集) -
SFM(colmap)计算初始点云和相机pose:
从零开始跑通3DGS教程:(二)SFM(colmap)计算初始点云和相机pose该步骤将通过structure from motion算法,计算出每张图像的pose,以及整个场景和目标的稀疏点云
-
坐标系与尺度编辑(CloudCompare):
从零开始跑通3DGS教程:(三)坐标系与尺度编辑(CloudCompare) -
修改sfm生成的原始数据
从零开始跑通3DGS教程:(四)修改(缩放、空间变换)colmap生成的sfm结果 -
3DGS训练:
从零开始跑通3DGS教程:(五)3DGS训练 -
Gaussian Model编辑与渲染:
从零开始跑通3DGS教程:(六)Gaussian Model编辑与渲染
docker
安装docker
docker常用命令docker安装 部分
可以使用以下命令,避免每次使用docker都需要sudo和密码
bash
sudo usermod -aG docker $USER
sudo service docker restart
sudo chmod 666 /var/run/docker.sock安装nvidia-docker依赖
Installing the NVIDIA Container Toolkit
bash
curl -fsSL https://nvidia.github.io/libnvidia-container/gpgkey | sudo gpg --dearmor -o /usr/share/keyrings/nvidia-container-toolkit-keyring.gpg \
&& curl -s -L https://nvidia.github.io/libnvidia-container/stable/deb/nvidia-container-toolkit.list | \
sed 's#deb https://#deb [signed-by=/usr/share/keyrings/nvidia-container-toolkit-keyring.gpg] https://#g' | \
sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list
sed -i -e '/experimental/ s/^#//g' /etc/apt/sources.list.d/nvidia-container-toolkit.list
sudo apt-get update
sudo apt-get install -y nvidia-container-toolkitcolmap docker
关于colmap
colmap是一个SFM(Structure From Motion)+MVS(Multi VIew Stereo)的开源框架,SFM用于从不同视角采集的多张图像中,恢复相机pose以及场景结构(稀疏点云),MVS用于对场景进行稠密重建(稠密点云)以及表面重建(Mesh)
其官方github为
https://github.com/colmap/colmap
官方文档
https://colmap.github.io/index.html
docker
这里使用现成的colmap docker镜像,如果熟悉环境配置、编译或者本地已有colmap的可以不用
pull docker:https://hub.docker.com/r/colmap/colmap/tags
这里选择colmap:20240219.29版本
bash
docker pull colmap/colmap:20240219.29创建新的容器,请修改你的宿主机路径"YOUR_PATH"
# docker pull colmap/colmap:20240219.29
xhost +
docker run \
--name=colmap \
-e DISPLAY=$DISPLAY \
-w /working \
-v YOUR_PATH/3dgs_tutorial:/working/3dgs_tutorial \
-v /tmp/.X11-unix:/tmp/.X11-unix \
--gpus all \
--privileged \
-it colmap/colmap:20240219.29 /bin/bash创建成功如下
可以先输入exit退出

计算
本文相关:
3DGS需要的输入是相机pose,内参,以及场景的稀疏点云,因此我们将只会使用SFM相关的计算;
colmap提供图形化交互界面,以及命令行的方式,来完成SFM的计算
gui
进入图形化界面
启动容器
bash
docker start colmap进入容器,开启图形化界面
bash
docker exec -it colmap /bin/bash
colmap gui可能会遇到界面是黑色的,ctrl+c多试几次就行
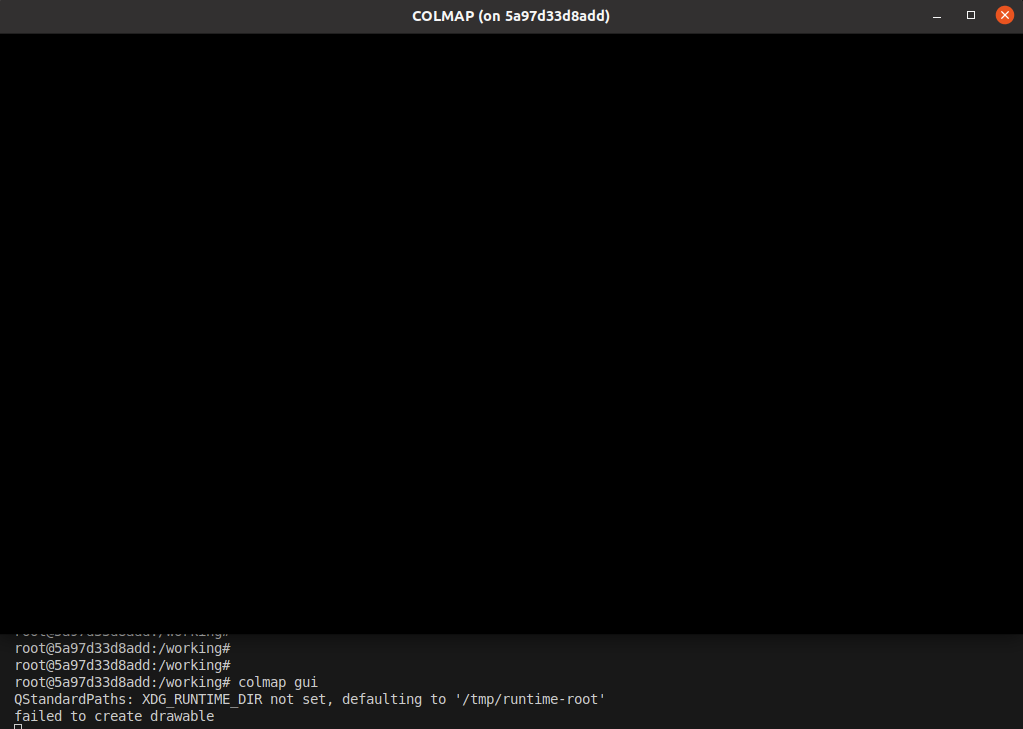
正常进入如图

使用
-
新建project
File--->New project--->New
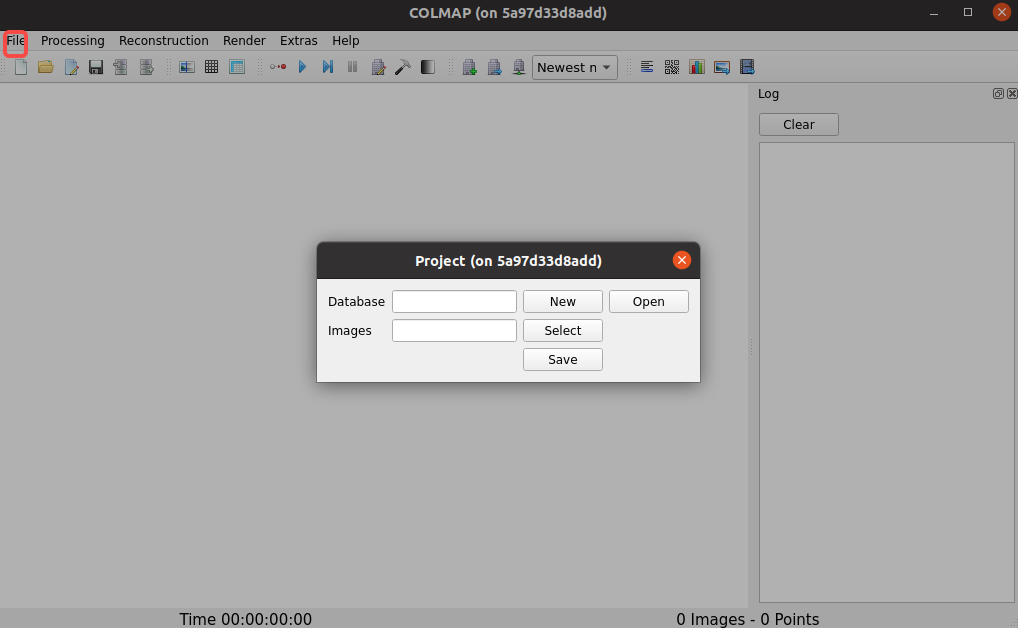
选择之前放好的数据路径,输入database, 保存
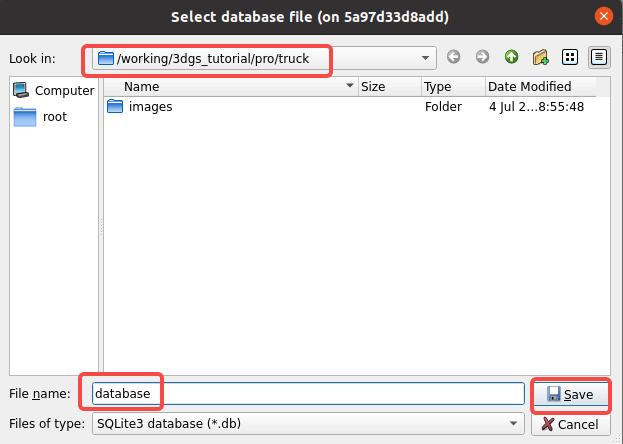
然后选择图像路径为之前放好的images
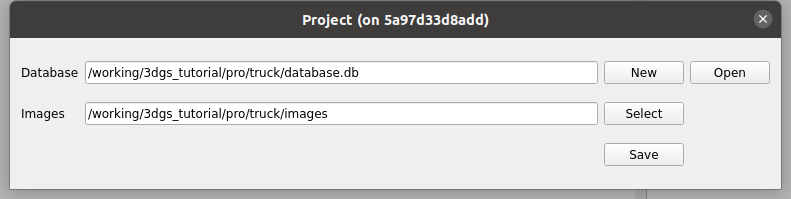
然后点击save
-
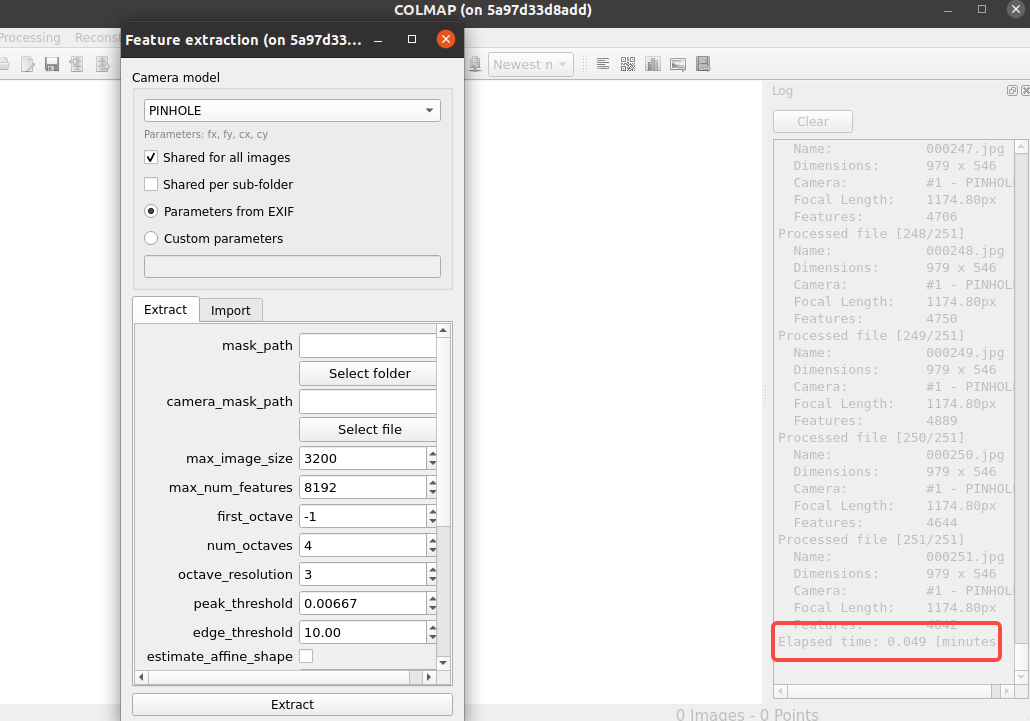
特征提取
Processing--->Feature extraction

处理完成会显示时间
特征匹配
Processing--->Feature matching
如果是无序图像,使用Exhaustive

如果是视频提取的有序图像,使用Sequential

这里truck数据是有序的数据,我们使用Sequential,点击run,等待处理完成
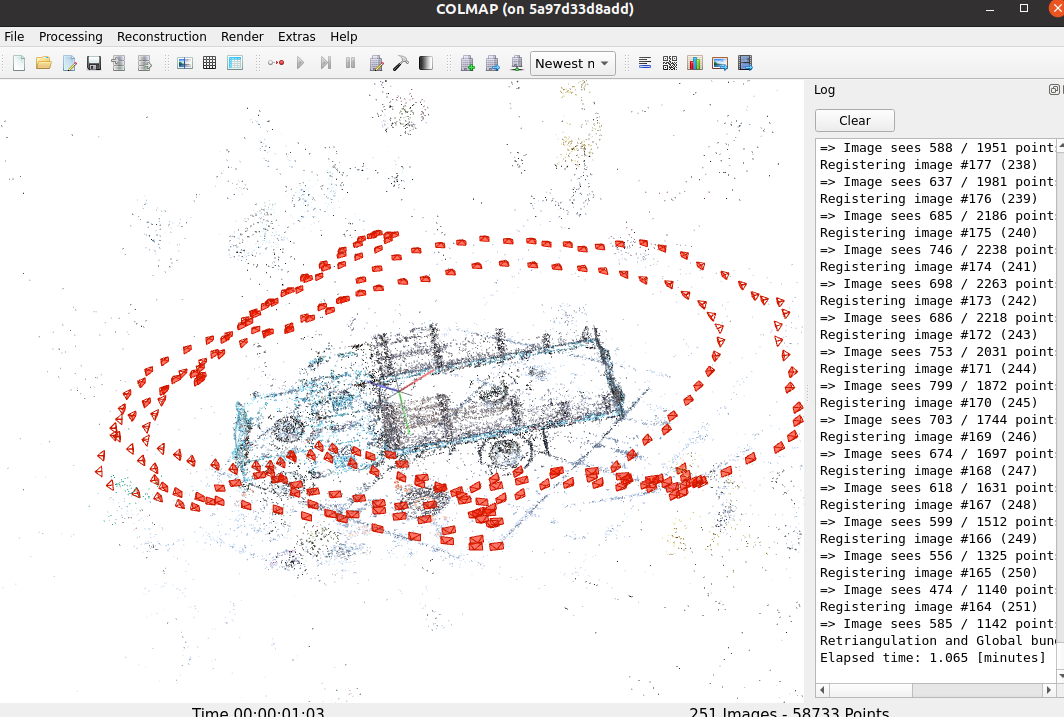
- SFM重建
Reconstruction--->start reconstruction
等待计算完成
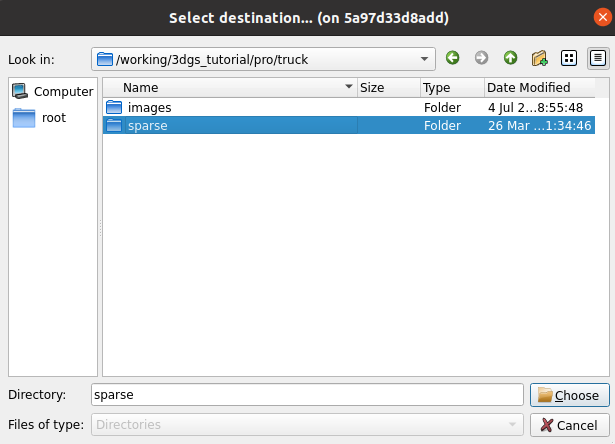
- 导出
bash
cd 3dgs_tutorial/pro/truck
mkdir sparseFile--->export model
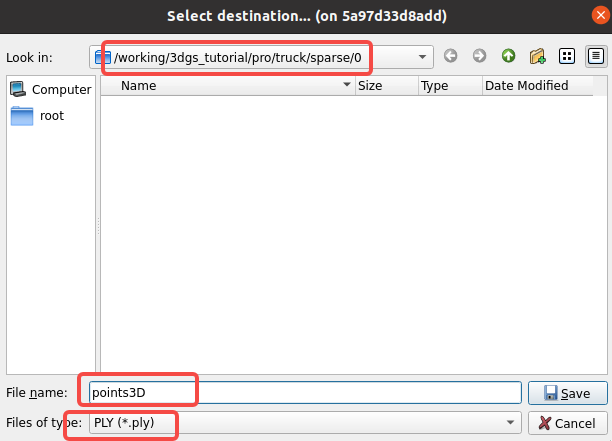
导出点云
File--->export model as
命令行
启动容器
bash
docker start colmap进入容器
bash
docker exec -it colmap /bin/bash计算
bash
cd 3dgs_tutorial/pro
cp sfm.sh truck/
cd truck
sh sfm.sh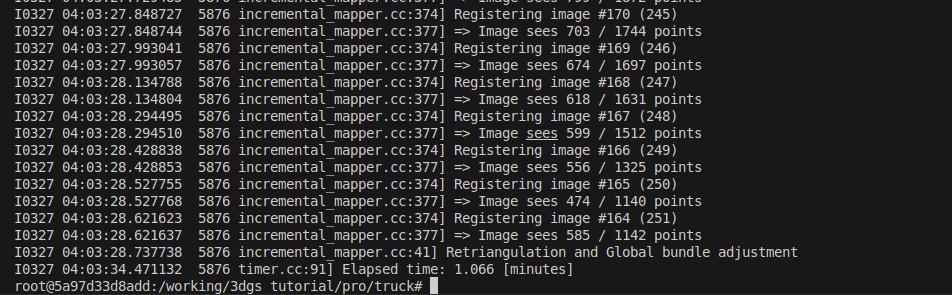
其中,sfm.sh为以下脚本,如果是无序图像,请使用colmap exhaustive_matcher
bash
DATASET_PATH=$(pwd)
echo "processing: $DATASET_PATH"
colmap feature_extractor --database_path \
$DATASET_PATH/database.db --image_path $DATASET_PATH/images \
--ImageReader.camera_model=PINHOLE
# colmap exhaustive_matcher \
# --database_path $DATASET_PATH/database.db
colmap sequential_matcher \
--database_path $DATASET_PATH/database.db
mkdir $DATASET_PATH/sparse
colmap mapper \
--database_path $DATASET_PATH/database.db \
--image_path $DATASET_PATH/images \
--output_path $DATASET_PATH/sparse
colmap model_converter \
--input_path $DATASET_PATH/sparse/0 \
--output_path $DATASET_PATH/sparse/0/points3D.ply \
--output_type PLY权限
因为docker是root权限,生成的文件也就是,需要回到宿主机,修改权限
cd YOUR_PATH/3dgs_tutorial/scripts
sh chown.sh
可视化
将生成好的sparse/0/point3D.ply放进Cloudcompare可视化

编辑
下一步将进行坐标系编辑和尺度修正:
从零开始跑通3DGS教程:(三)坐标系与尺度编辑(CloudCompare)
如果不关心坐标系和尺度,可以直接进行3dgs训练:
从零开始跑通3DGS教程:(四)3DGS训练
参考
文中已列出
完
主要做激光/影像三维重建,3DGS,配准、分割等常用点云算法,熟悉open3d、pcl等开源点云库,技术交流、咨询可私信