主要参考学习资料:
B站@江协科技
STM32入门教程-2023版 细致讲解 中文字幕
开发资料下载链接:https://pan.baidu.com/s/1h_UjuQKDX9IpP-U1Effbsw?pwd=dspb
单片机套装:STM32F103C8T6开发板单片机C6T6核心板 实验板最小系统板套件科协
实验:
- OLED调试
- 对射式红外传感器计次
- 旋转编码器计次
新函数:
- GPIO库函数(剩余)
- EXTI库函数
- NVIC库函数
目录
- 调试方式
- OLED简介
- 硬件电路
- OLED驱动函数
- [实验5 OLED调试](#实验5 OLED调试)
- 中断系统
- EXTI简介
- 硬件模块
- 函数详解
- [实验6 对射式红外传感器计次](#实验6 对射式红外传感器计次)
- [实验7 旋转编码器计次](#实验7 旋转编码器计次)
调试方式
- 串口调试:通过串口通信,将调试信息发送到电脑端,电脑使用串口助手显示调试信息。
- 显示屏调试:直接将显示屏连接到单片机,将调试信息打印在显示屏上。
- Keil调试模式:借助Keil软件的调试模式,可使用单步运行、设置断点、查看寄存器及变量等功能。
其他调试方式:
- 点灯调试:如果不清除程序是否执行到了某个位置,可以在该位置写一个点灯的代码,执行到了灯就会亮。
- 注释调试:如果程序添加了一段代码就跑不动了,则把添加的代码全部注释,再一行行解除注释运行,直到错误出现。
- 对照调试:参照他人能正常运行的代码,将其中的程序逻辑逐步替换成自己的。
OLED简介
- OLED:有机发光二极管
- OLED显示屏:性能优异的新型显示屏,具有功耗低、响应速度快、宽视角、轻薄柔韧等特点。
- 0.96寸OLED模块:小巧玲珑、占用接口少、简单易用,是电子设计中非常常见的显示屏模块。
- 供电:3~5.5V;通信协议:I2C/SPI;分辨率:128×64
OLED及本期实验效果图:
硬件电路

除了GND和VCC,4针脚OLED的剩下两个引脚为I2C通信引脚,7针脚OLED的剩下五个引脚为SPI通信引脚。外设的通信引脚需要与单片机对应通信协议的引脚相连,如果使用GPIO口模拟通信也可以接在任意GPIO口上。本次使用4针脚OLED。
OLED驱动函数
由于通信协议在后期学习,我们目前先使用资料包提供的硬件驱动,其包括以下函数:

其中显示函数的前两个参数为显示起始位置的坐标,数字显示函数的第四个参数为显示数字长度,过长则高位补零,过短则不显示高位。
实验5 OLED调试
电路连接

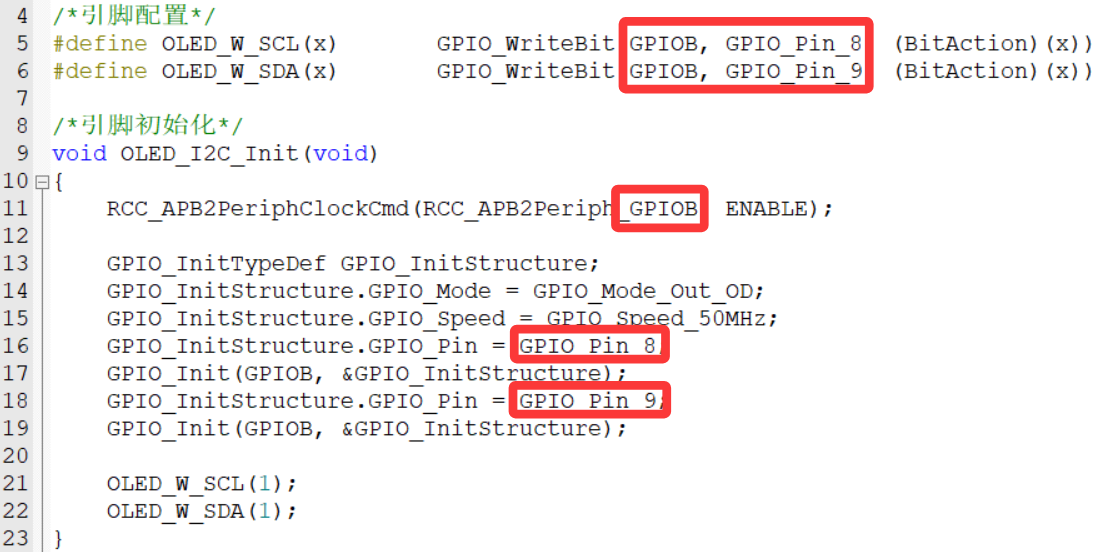
SCL接PB8,SDA接PB9。
OLED驱动
将资料包中程序源码 > STM32Project-无注释版 > 1-4 OLED驱动函数模块 > 4针脚I2C版本的三个文件复制粘贴到工程的Hardware文件夹并在Keil5中添加到组。
如果SCL和SDA接在了其他GPIO引脚上,则需要修改图中OLED.c对应的部分:
主程序
c
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
int main(void)
{
OLED_Init();
OLED_ShowChar(1, 1, 'A');
OLED_ShowString(1, 3, "HelloWorld!");
OLED_ShowNum(2, 1, 12345, 5);
OLED_ShowSignedNum(2, 7, -66, 2);
OLED_ShowHexNum(3, 1, 0xAA55, 4);
OLED_ShowBinNum(4, 1, 0xAA55, 16);
while(1)
{
}
}中断系统
- 中断:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行。
- 中断优先级:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源。
- 中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请终端,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回。
中断执行流程
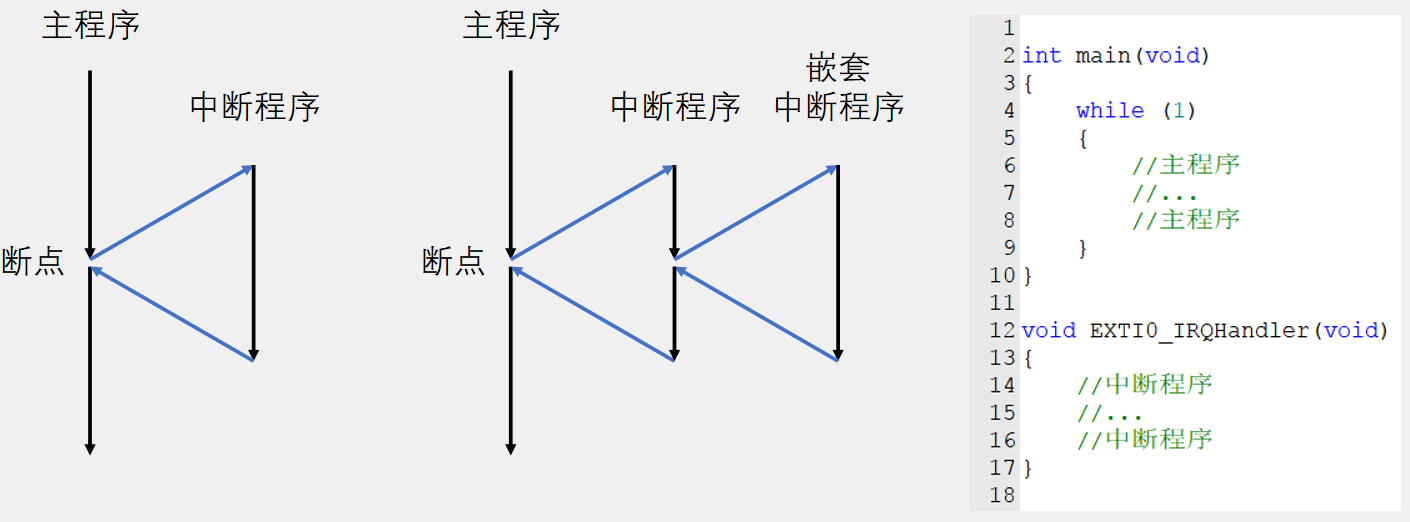
中断程序在子函数里,该子函数不需要我们调用,在触发中断时硬件会自动调用。
STM32中断
- F1系列最多有68个可屏蔽终端通道,包括EXTI、TIM、ADC、USART、SPI、I2C、RTC等多个外设。
- 使用NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先等级进行分组,进一步设置抢占优先级和响应优先级。
STM32中断向量表
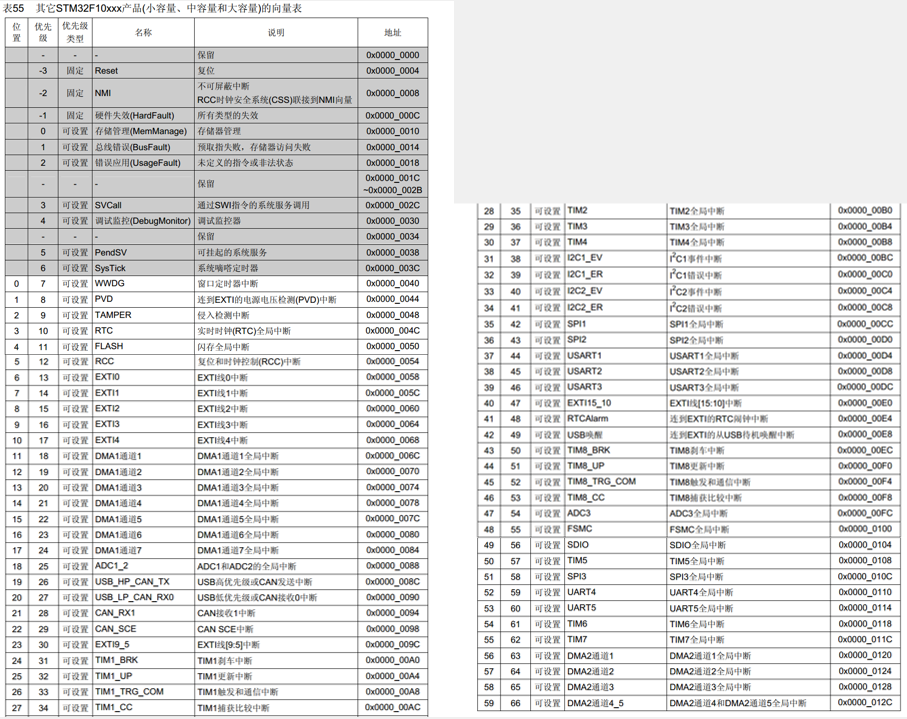
灰色部分为内核中断,一般用不到。白色部分为外设中断,本节用到EXTI9_5和EXTI15_10。
中断地址:由于程序中的中断函数的地址由编译器分配,是不固定的,但中断跳转由于硬件限制只能跳到固定的地址执行程序。为了让硬件跳转到地址不固定的中断函数里,需要再内存中定义一个地址列表(中断向量表),中断发生后跳转到固定地址,在固定地址再由编译器加上一条跳转到中断函数的代码。在C语言编程中编译器已经帮我们配置好了,无需中断向量表。
NVIC介绍
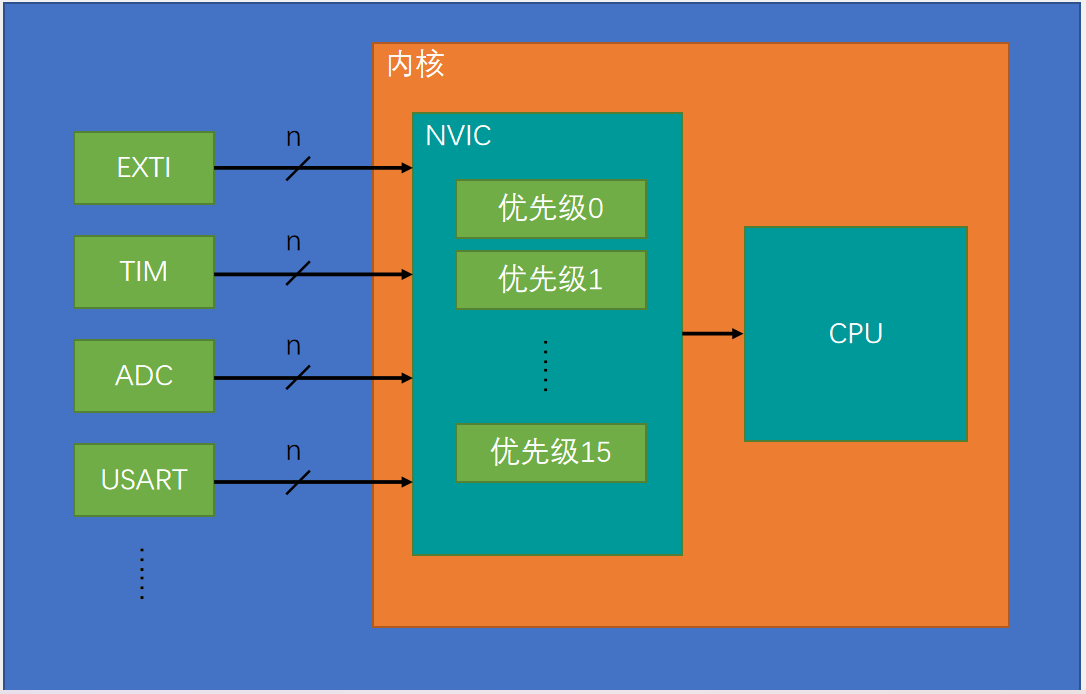
NVIC是嵌套中断向量控制器,用来统一分配中断优先级和管理中断,并告诉CPU应该处理哪个中断,为CPU分担任务。
NVIC优先级分组
- NVIC的中断优先级由优先级寄存器的4位决定,这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级。
- 抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均按中断号排队。

EXTI简介
- EXTI(Extern Interrupt)外部中断
- EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序。
- 支持的触发方式:上升沿/下降沿/双边沿/软件触发
- 支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断
- 通道数:16个Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒,后四个功能均为从低功耗模式的停止模式下唤醒STM32。
- 触发响应方式:中断响应/事件响应(不会触发中断而是触发别的外设操作)
EXTI基本结构
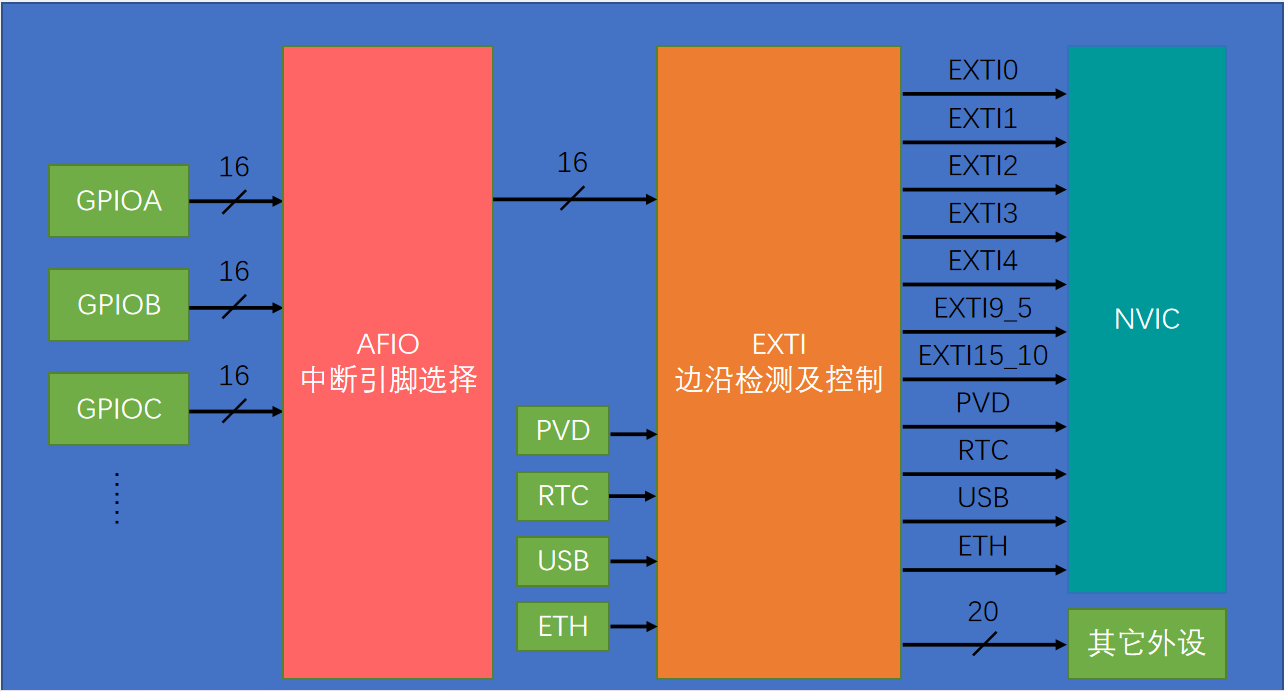
对于GPIO的16个Pin,AFIO从所有GPIO外设中选择其中一个连接到EXTI通道,因此相同的Pin不能同时触发中断。16个Pin和4个外加组成了EXTI的20个输入通道,而输出通道中EXTI的9~5、15~10被分配到一个通道里,需在中断函数中要根据标志位区分到底是哪个中断,20个连接到其他外设的输出通道为事件响应。
AFIO复用IO口
- AFIO主要用于引脚复用功能的选择和重定义。
- 在STM32中,AFIO主要完成两个任务:复用功能引脚重映射、中断引脚选择。

EXTI框图
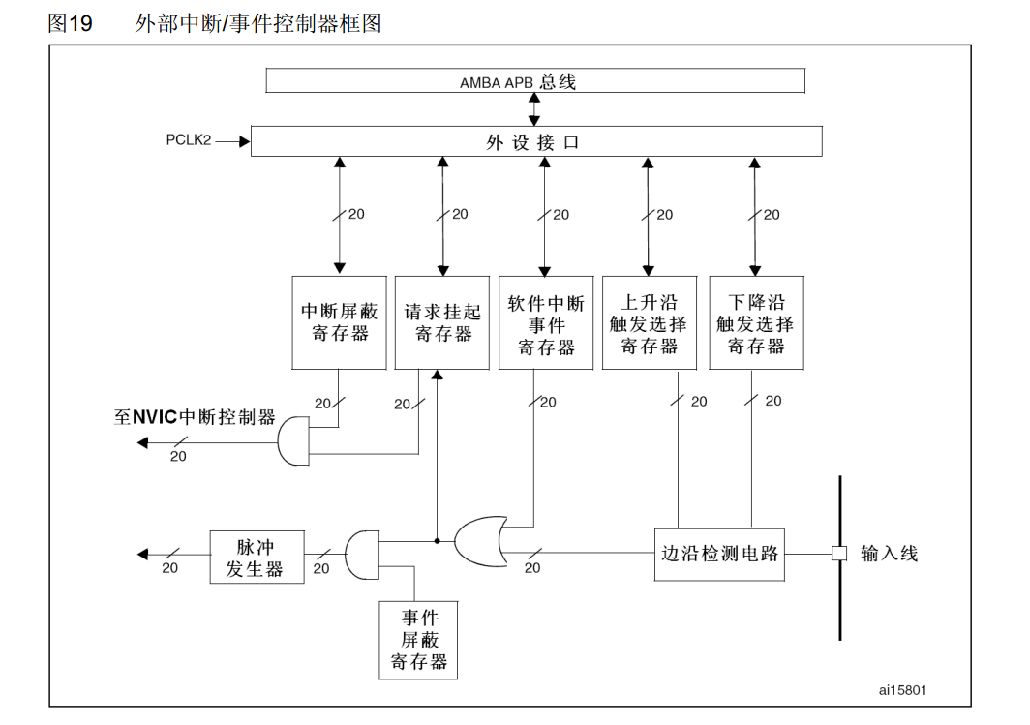
上升沿/下降沿触发选择寄存器控制上升沿/下降沿/双边沿触发方式是否有效,经边沿检测后,硬件触发和软件中断事件寄存器接到一个或门,随后分为两路,上一路触发中断响应,下一路触发事件响应。触发中断响应首先会经过请求挂起寄存器,相当于中断标志位,通过读取该寄存器判断中断由哪个通道触发。请求挂起寄存器置一后,中断信号和中断屏蔽寄存器接到一个与门,只有中断屏蔽寄存器置一才允许中断,事件屏蔽寄存器同理。
硬件模块
旋转编码器介绍
- 旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向。
- 类型:机械触点式/霍尔传感器式/光栅式

硬件电路
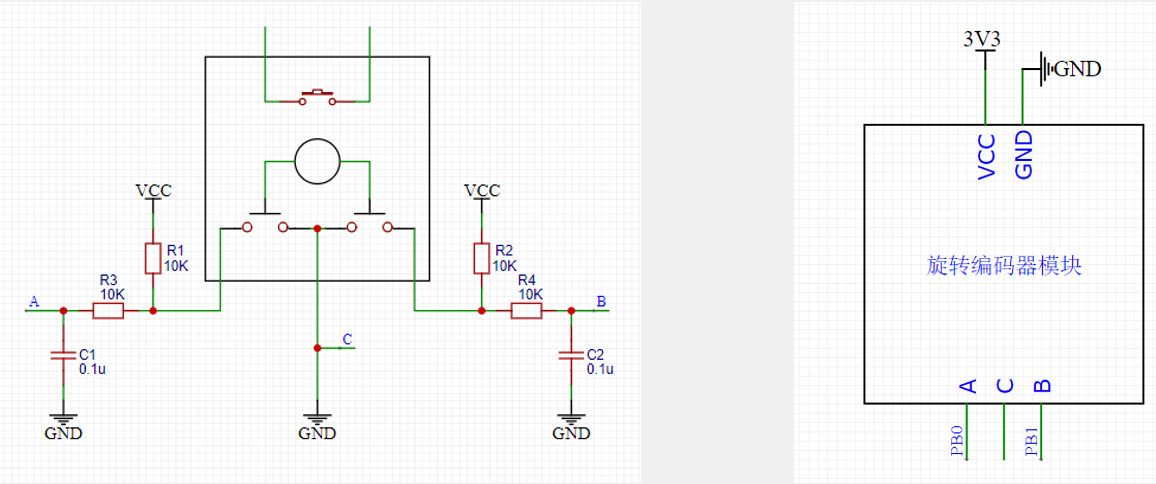
本次使用机械触点式旋转编码器,方框中上方按键模块悬空并未使用,下方即编码器内部的两个触点,旋转轴旋转时,这两个触点以相位差90°的方式交替导通,通过两个触点产生下降沿的先后次序判断旋转方向。
A、B端口各有一个上拉电阻、输出限流电阻和滤波电容,C端口接GND,触点导通为低电平,断开为高电平。使用模块时上方VCC、GND接电源,下方A、B接到两个Pin不一样的GPIO口,C暂时不用。
函数详解
GPIO库函数
本次展示剩余的GPIO库函数,其中包括AFIO函数。
GPIO_AFIODeInit函数
简介:清除AFIO外设配置。
参数:空
GPIO_PinLockConfig函数(不常用)
简介:锁定GPIO配置。
参数一:GPIO外设名称
参数二:引脚编号
GPIO_EventOutputConfig函数(不常用)
简介:选择GPIO引脚用作事件输出。
参数一:GPIO外设源
GPIO_PortSourceGPIOA, ..., GPIO_PortSourceGPIOE参数二:GPIO引脚源
GPIO_PinSource0, ..., GPIO_PinSource15GPIO_EventOutputCmd函数(不常用)
简介:使能或失能事件输出,跟在GPIO_EventOutputConfig函数之后,对相应引脚进行使能或失能。
参数:使能/失能
ENABLE, DISABLEGPIO_PinRemapConfig函数
简介:引脚重映射。目前未学到需要映射引脚的外设,实际调用之后展示。
参数一:重映射方式
参数二:新的状态(使能/失能)
GPIO_EXTILineConfig函数
简介:配置AFIO数据选择器来选择想要的中断引脚。
参数一:GPIO外设源
参数二:GPIO引脚源
GPIO_ETH_MediaInterfaceConfig函数(不常用)
简介:选择以太网接口。套件没有以太网外设。
参数:GPIO以太网接口
GPIO_ETH_MediaInterface_MII, GPIO_ETH_MediaInterface_RMIIEXTI库函数
EXTI_DeInit函数
简介:清除EXTI配置,恢复上电默认状态。
参数:空
EXTI_Init函数
简介:EXTI外设配置函数,使用方法和GPIO_Init同理。
参数:指向初始化信息EXTI_InitTypeDef结构体的指针
EXTI_InitTypeDef结构体
成员EXTI_Line:中断线路
EXTI_Line0, ..., EXTI_Line19成员EXTI_LineCmd:中断线路状态(开启/关闭)
ENABLE, DISABLE成员EXTI_Mode:中断线路模式
中断模式:EXTI_Mode_Interrupt
事件模式:EXTI_Mode_Event成员EXTI_Trigger:触发信号的有效边沿
上升沿:EXTI_Trigger_Rising
下降沿:EXTI_Trigger_Falling
双边沿:EXTI_Trigger_Rising_FallingEXTI_StructInit函数
简介:给EXTI_InitTypeDef结构体赋默认值。
参数:指向初始化信息EXTI_InitTypeDef结构体的指针
EXTI_GenerateSWInterrupt函数
简介:软件触发指定中断线路。
参数:中断线路
EXTI_GetFlagStatus函数
简介:在主程序中获取指定的挂起标志位状态。
参数:中断线路
返回值:SET/RESET
EXTI_ClearFlag函数
简介:在主程序中对置一的挂起标志位进行清除。
参数:中断线路
EXTI_GetITStatus函数
简介:在中断程序中获取指定的挂起标志位状态。
参数:中断线路
返回值:SET/RESET
EXTI_ClearITPendingBit函数
简介:在中断程序中对置一的挂起标志位进行清除。
参数:中断线路
NVIC库函数
以下NVIC库函数声明于负责杂项的misc.h中。
NVIC_SetVectorTable函数(设置向量表的位置和偏移)和NVIC_SystemLPConfig函数(选择系统进入低功耗模式的条件)不常用,不单独解释。
NVIC_PriorityGroupConfig函数
简介:中断优先级分组。
参数:分组方式
NVIC_PriorityGroup_0, ..., NVIC_PriorityGroup_4
(数字为分配给抢占优先级的位数)NVIC_Init函数
简介:初始化NVIC。
参数:指向初始化信息NVIC_InitTypeDef结构体的指针
NVIC_InitTypeDef结构体
成员NVIC_IRQChannel:中断通道
库函数兼容所有F1系列芯片,不同芯片中断通道列表不一样,根据条件编译选择
套件芯片对应库函数中STM32F10X_MD
中断通道较多,不一一列举,基本为'通道名称_IRQn'格式,例如EXTI15_10_IRQn成员NVIC_IRQChannelCmd:使能/失能
成员NVIC_IRQChannelPreemptionPriority:抢占优先级(取值范围取决于优先级分组方式)
成员NVIC_IRQChannelSubPriority:响应优先级(取值范围取决于优先级分组方式)
实验6 对射式红外传感器计次
电路连接

对射式红外传感器的DO口接B14,当挡光片或编码盘从对射式红外传感器中间经过,DO输出电平跳变信号,触发PB14口中断。
对射式红外传感器计数驱动
以后若无特殊说明,驱动都放Hardware文件夹及组中。
CountSensor.h
c
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
void CountSensor_Init(void);
uint16_t CountSensor_Get(void);
//中断函数自动调用,无需声明
#endifCountSensor.c
c
#include "stm32f10x.h"
#include "Delay.h"
//计数全局变量,默认初始化为0
uint16_t CountSensor_Count;
void CountSensor_Init(void)
{
//配置时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//EXTI和NVIC的时钟默认打开
//配置GPIO
GPIO_InitTypeDef GPIO_InitStructure;
//EXTI可选浮空/上拉/下拉输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//配置AFIO
//将PB14接到EXTI14中断线路
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);
//配置EXTI
//将EXTI14中断线路配置为中断模式,下降沿触发,并开启中断
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line14;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
//配置NVIC
//根据实际需求选择中断分组,中断不多时随意
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
//只有一个中断,优先级随意
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
//返回计数值
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
//中断函数名称在启动文件startup_stm32f10x_md.s中规定
void EXTI15_10_IRQHandler(void)
{
//检查中断挂起标志位
if(EXTI_GetITStatus(EXTI_Line14) == SET)
{
//若传感器不稳定可消抖
Delay_ms(100);
CountSensor_Count ++;
Delay_ms(100);
//中断程序结束时清除标志位,否则会持续申请中断
EXTI_ClearITPendingBit(EXTI_Line14);
}
}主程序
c
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
int main(void)
{
OLED_Init();
CountSensor_Init();
OLED_ShowString(1, 1, "Count:");
while(1)
{
OLED_ShowNum(1, 7, CountSensor_Get(), 5);
}
}实验7 旋转编码器计次
电路连接

旋转编码器A端接PB0,B端接PB1。
旋转编码器驱动
Encoder.h
c
#ifndef __ENCODER_H
#define __ENCODER_H
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endifEncoder.c
c
#include "stm32f10x.h"
int16_t Encoder_Count;
//初始化函数框架沿用实验6,但要配置PB0和PB1两个端口
void Encoder_Init(void)
{
//配置时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//配置GPIO
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//配置AFIO
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);
//配置EXTI
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
//配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
//重复利用结构体变量初始化另一个引脚
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStructure);
}
//返回Encoder_Count自上次清零前的变化量
//该操作的好处是也可以通过每隔一段时间调用检测转速
int16_t Encoder_Get(void)
{
int16_t Temp;
Temp = Encoder_Count;
Encoder_Count = 0;
return Temp;
}
//中断函数由第一个下降沿触发,再判断另一个引脚是否产生第二个下降沿
//旋转方向自行指定
void EXTI0_IRQHandler(void)
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
Encoder_Count --;
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
void EXTI1_IRQHandler(void)
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
Encoder_Count ++;
}
EXTI_ClearITPendingBit(EXTI_Line1);
}主程序
c
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1, 1, "Num:");
while(1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1, 5, Num, 5);
}
}