* 本文只做阅读笔记分享 *
一、灵感来源:向植物取经
大家好!今天来聊一款超酷的软爬机器人,它的灵感来自会攀爬的植物------爬山虎。
大家都知道,爬墙高手爬山虎能在各种复杂墙面轻松生长攀爬,可现有的攀爬机器人在复杂表面作业时却困难重重。那能不能让机器人学学爬山虎呢?
研究人员就想到了这个超棒的点子,从爬山虎的生长攀爬特性里找到了灵感,发明了这款厉害的软爬机器人!
二、生长攀爬机制:步步为"营"
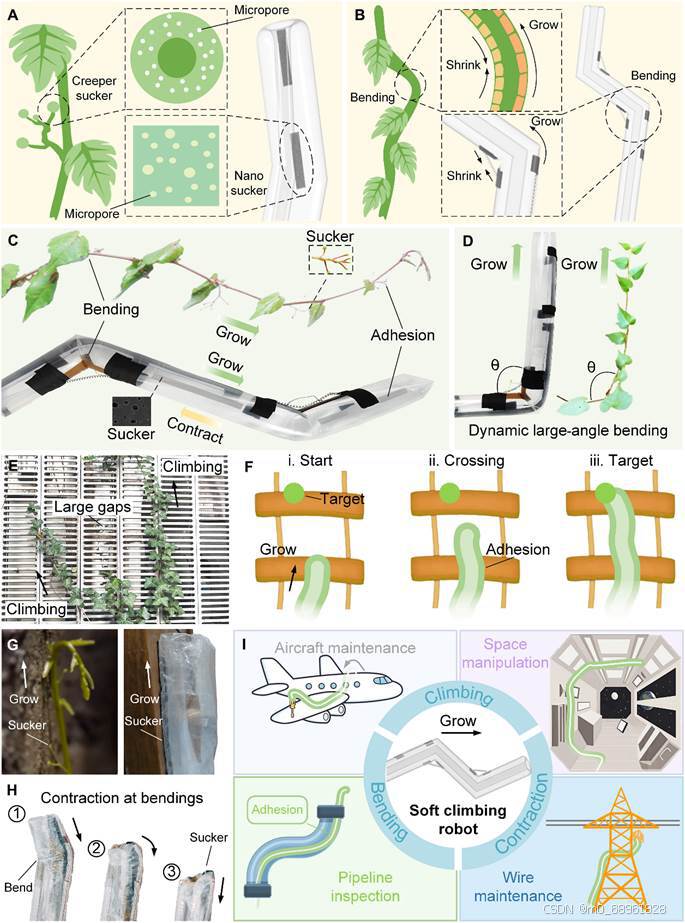
这款软爬机器人有个超厉害的生长攀爬机制,和爬山虎的原理很像哦!它的动力来源是气压,就像爬山虎靠细胞膨胀压力生长一样。
机器人在生长时,材料会像翻花一样向外翻,同时把营养物质(这里可以理解为机器人的"生长材料")运到前端,实现身体的延伸。
而且,它还模仿了爬山虎的吸盘,在身体上装了微结构生物膜。这个生物膜就像一个个超小的吸盘,利用范德华力和负压效应紧紧吸附在物体表面,不管是光滑的玻璃,还是粗糙的墙面,它都能牢牢抓住,轻松攀爬。
为了让大家更清楚,研究人员还建立了物理模型呢。
从模型里能看出,压力越大,机器人长得越快;生物膜和物体表面的吸附力也有公式计算,这就解释了为啥它在不同表面都能稳稳吸附。
通过实验也能发现,生物膜在光滑表面的吸附应力能达到10kPa,在粗糙表面也有7kPa,摩擦力比吸附力还强,像在陶瓷表面,摩擦力能到26.2±3.2kPa,超强的吸附能力让机器人能抓起各种不同的东西。
不管是在复杂材料表面,像木头、陶瓷、金属,还是复杂结构的表面,比如格栅、管道、墙角,它都能如履平地,轻松攀爬。

三、生长弯曲机制:灵活转向
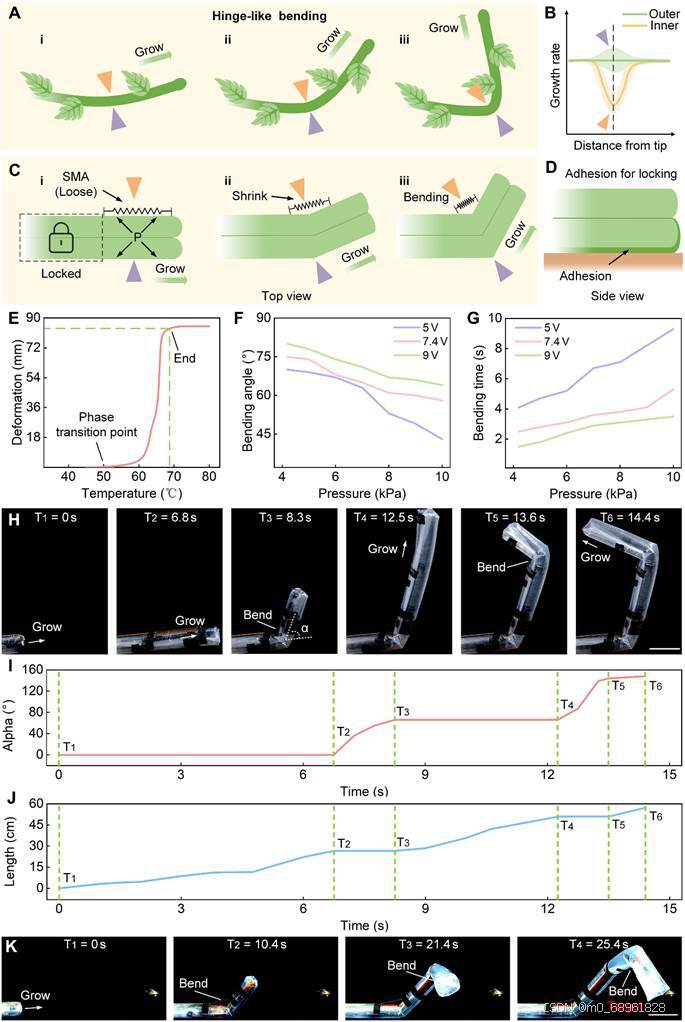
爬山虎在生长过程中能像铰链一样弯曲,而且弯曲的位置固定,不会影响后续生长。
软爬机器人也借鉴了这个特点!它的弯曲靠的是形状记忆合金(SMA)弹簧。当给SMA弹簧通电,因为热效应,弹簧会快速缩短,让机器人一侧产生褶皱,这一侧就会比另一侧短,机器人就弯曲啦。
而且,断电后弹簧的内力还在,能抵抗主气室的气压,让机器人保持弯曲状态一段时间。等温度降下来,弹簧又能拉伸。
实验测试发现,SMA弹簧可厉害啦,能拉伸到15cm,加热后回弹到1.5cm,变形量有13.5cm。当温度达到50°C,弹簧开始相变,68°C时就完全收缩。
在不同电压和气压下测试机器人的弯曲性能,结果显示,气压越小,弯曲角度越大,在4.2kPa、9V电压时,弯曲角度能达到80°;电压越大,弯曲角度也越大,弯曲时间还越短。在实际运动中,机器人能连续弯曲,还能进行复杂的3D生长,轻松到达目标位置。
四、收缩机制:任务完成,完美退场
一般的生长机器人收缩起来可难了,但咱这款软爬机器人有独特的收缩办法!它完成任务后,要收缩身体避免损坏场地。
收缩的原理就是让机器人的生长材料反向运动,就像把伸出去的部分拉回来。不过,在弯曲状态下收缩有点麻烦,因为内部材料的拉力不沿轴向,会产生径向力,可能让机器人弯曲变形。
为了解决这个问题,机器人利用了和墙面的吸附力。它身上的微结构生物膜产生的吸附力能抵消径向力,让机器人收缩时保持稳定。
实验中,弯曲的机器人收缩时,生物膜会像撕胶带一样从平面上剥离,然后机器人慢慢从墙上脱离。它不仅能在平面上收缩,在弯曲的窄管道里也能顺利完成收缩,是不是超厉害!

五、应用领域:大显身手
软爬机器人在实际生活中有超多厉害的应用!它装上摄像头模块,利用图像处理技术,就能进行实时路况分析和路径规划啦。
在遇到各种复杂环境,像有障碍物的地方,它能通过摄像头识别目标,然后根据指令左转、右转或者直走,就像有了"智慧大脑"一样。
而且,它还能利用生长产生的力量完成一些操作任务,比如关灯,只要碰到开关,就能轻松完成,是不是很有趣?

它还能和无人机合作呢!在一些像建筑工地这样的场景,有很多不连续的表面,传统机器人根本爬不上去。
但软爬机器人就能装在无人机上,无人机把它带到指定位置后,它就能从生长模块里伸出来,爬上脚手架,穿过狭窄缝隙,去探索目标。
无人机负责大范围移动,软爬机器人负责小范围侦察,它们配合得超默契,和其他攀爬机器人比起来,这款软爬机器人的攀爬适应性更广,特别是在不连续表面,优势特别明显。

六、一起来做做题吧
1、关于爬山虎的生长攀爬,下列说法正确的是( )
A. 爬山虎生长的驱动力是细胞渗透压
B. 其攀爬主要依靠茎的缠绕
C. 生长和攀爬过程中不需要营养物质运输
D. 爬山虎的吸盘有许多微结构来增强吸附
2、软爬机器人的生长攀爬机制中,驱动其生长的是( )
A. 细胞膨压
B. 气压
C. 液压
D. 电力
3、软爬机器人的微结构生物膜在吸附方面,以下说法错误的是( )
A. 吸附力会随使用次数增加而减弱
B. 可利用范德华力进行吸附
C. 能在多种表面产生足够吸附力
D. 吸附应力在光滑表面比粗糙表面高
4、软爬机器人实现弯曲的部件是( )
A. 液压杆
B. 形状记忆合金弹簧
C. 电动马达
D. 普通金属弹簧
5、在软爬机器人的收缩机制中,为防止收缩时机器人弯曲,需要满足的条件是( )
A. 轴向力大于径向力
B. 径向力大于吸附力
C. 径向力小于吸附力
D. 轴向力小于吸附力
参考文献:
Kecheng Qin et al. Parthenocissus-inspired soft climbing robots. Sci. Adv.11, eadt9284(2025).