技术栈
柔性关节双臂机器人奇异摄动鲁棒自适应PD控制
Abcdsa
2025-04-09 18:54
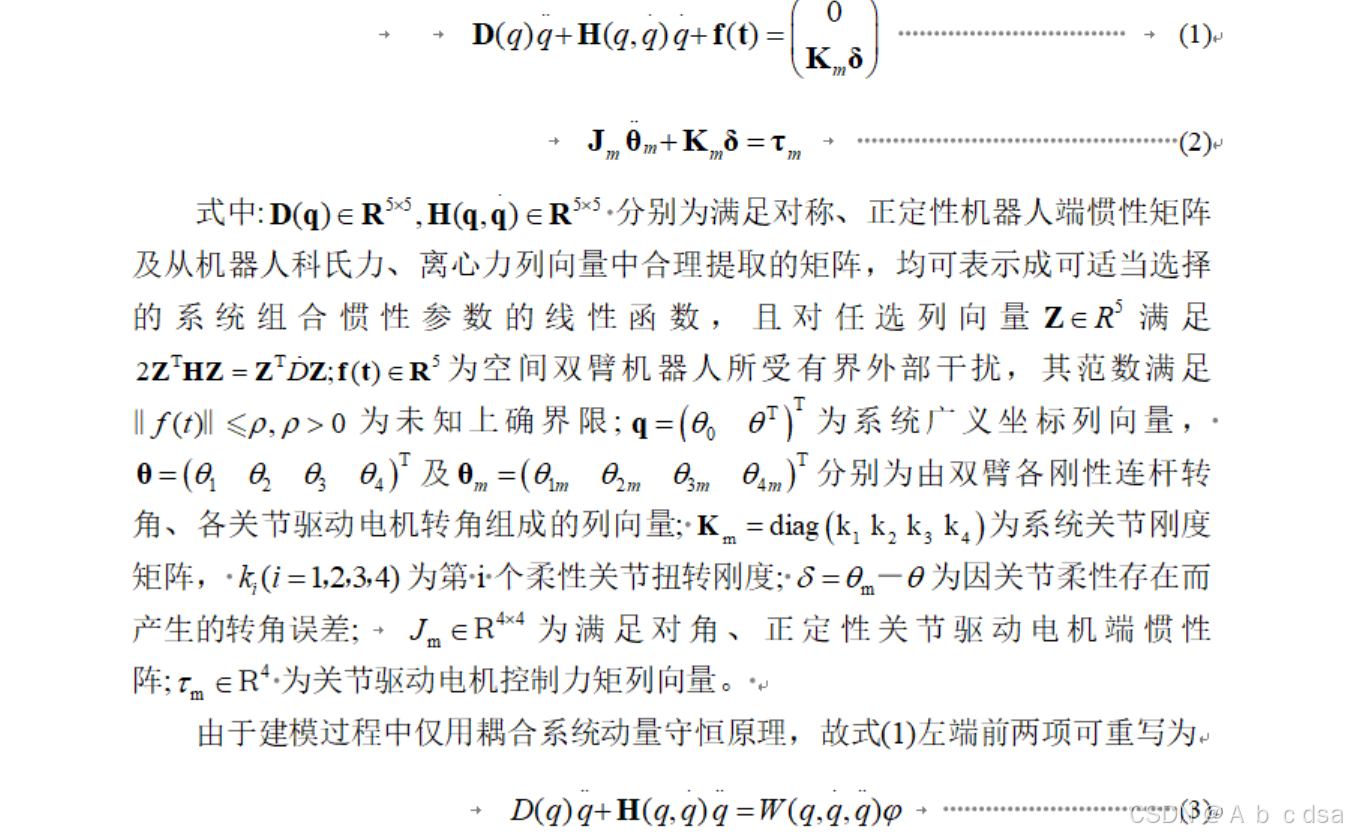
1 双臂机器人动力学模型
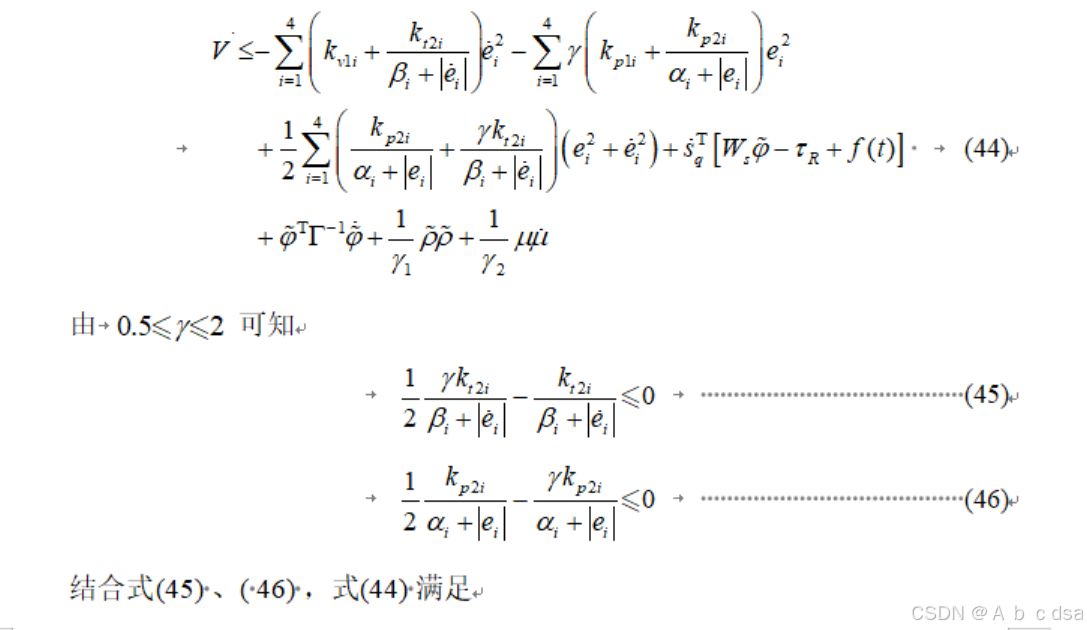
对于一个具有多个关节的机器人来说,机器人端动力学子方程及关节驱动电机端动力学子方程为:
以上为推导过程,MATLAB程序已完成,若需要可找我。
机器人
上一篇:
Kotlin 操作符重载
下一篇:
ColorStateList 用法详解
相关推荐
阿里云大数据AI技术
9 小时前
莫刻机器人LJM登榜WorldArena第二!阿里云PAI提供全流程训练支撑
人工智能
·
机器人
guanchabao
13 小时前
教育培训行业招生外呼机器人怎么设置话术?
机器人
科技圈快迅
15 小时前
在机场与高铁站:智能服务机器人正在深度对接业务系统,实现从信息孤岛到移动服务窗口的转变
大数据
·
人工智能
·
机器人
renhongxia1
15 小时前
WAIC 2026闭幕:机器人从跳舞变成拧螺丝
机器人
武子康
15 小时前
VLA 已经能输出动作,为什么机器人仍需要多时间尺度闭环
人工智能
·
机器人
·
agent
workflower
16 小时前
情境感知系统
人工智能
·
机器学习
·
设计模式
·
自然语言处理
·
机器人
CoreTK_EMC
17 小时前
机器人 EMC 器件选型指南:适配多关节伺服与灵巧手的量产级选型方法论
机器人
·
芯通康
·
机器人 emc 器件选型
·
伺服电机 emc 器件
·
灵巧手 esd 选型
·
工业级共模电感
·
机器人关节防护器件
q***o69
18 小时前
承接“高频碎片化问询”:服务机器人如何协同枢纽运营,优化旅客体验
机器人
国科安芯
18 小时前
还是4位?ASC8T245S 与 ASC4T245S 的双向电平转换选型实战
单片机
·
嵌入式硬件
·
物联网
·
fpga开发
·
机器人
·
云计算
TMT星球
18 小时前
荣耀将阿莱电影工作流融入机器人手机
人工智能
·
智能手机
·
机器人
热门推荐
01
GitHub 镜像站点
02
如何新建文件夹? 电脑新建文件夹的4种方法
03
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
04
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
05
AI科技热点日报 | 2026年07月01日
06
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?
07
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
08
微信历史版本含下载地址( Windows PC | 安卓 | MAC )及设置微信不更新
09
幻兽帕鲁 - 服务器管理员权限与 GM 命令完全指南
10
Agnes AI 免费 API 接入指南:文本、生图、生视频,一套接口全免费