目前随着科技的快速发展,各种自动化设备越来越多,无论是工业还是农业等各个领域都已经出现了越来越多的便捷设备来帮助人减少劳动或者降低劳动风险,而最近几年,最热门的莫过于采摘机械手。采摘机械手是通过将传统的传导机构与可控夹子组合的方式,来完成物体的抓取等,其结合PLC或者单片机等控制器可以极大的方便用户。
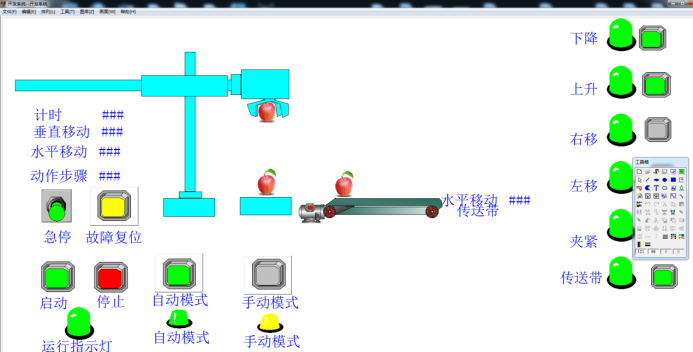
本次设计围绕基于PLC的采摘机械手系统进行设计, PLC即可编程控制器其是一种常见的微处理器,本次拟采用西门子是S7-200 PLC,一方面对整个设计从器件选型到I/O分配,图纸绘制等进行设计,另一方面还通过组态王仿真软件进行仿真验证。通过仿真测试,本次设计的采摘采摘机械手在步进电机驱动下可以完成对采摘机械手在搬运过程中的下降、夹紧、上升、右旋、下降等全过程自动化控制,对后来学者具有一定的参考意义。