解决无人机无人化自主巡检面对的新挑战-机载通信、控制及算力的AIBOX
之前的微文:基于无人机的无人化自主巡检-大疆机场3+M4TD,介绍了机场3的无人机无人机巡检的特点以及局限性。此处从通信增强、飞行及位置服务增强、智慧飞行以及无人机编队几个方面阐述如何解决无人机无人机化巡检面对的挑战。


挑战一、通信增强
大疆机场3+M4的无线通信仅一条完整的C2无线通信链路,即大疆私有的点到点的2.4G/5.8G。问题:大疆无线通信协议是私有协议,且仅支持点到点方式,遇到遮挡会导致无线信号下降,数据通信带宽下降严重,甚至无线通信中断。另外点到点更容易被干扰和侦测、无线数据通信安全也不够。
解决办法:通过机载AIBOX建立一条独立的基于运营商的C2和实时视频流的无线通信链路
为啥要脱离大疆的私有的点到点的无线通信?
脱离大疆的点到点-即无人机到遥控器或者机场无线通信的架构,带来的一个重要优势在于无人机无需和固定的遥控器或者机场绑定,就算没有遥控器或者机场,无人机依然可以完成飞行。这对于实现类似蛙跳飞行等一机多巢或者多机多巢的应用场景是重要的技术保障。
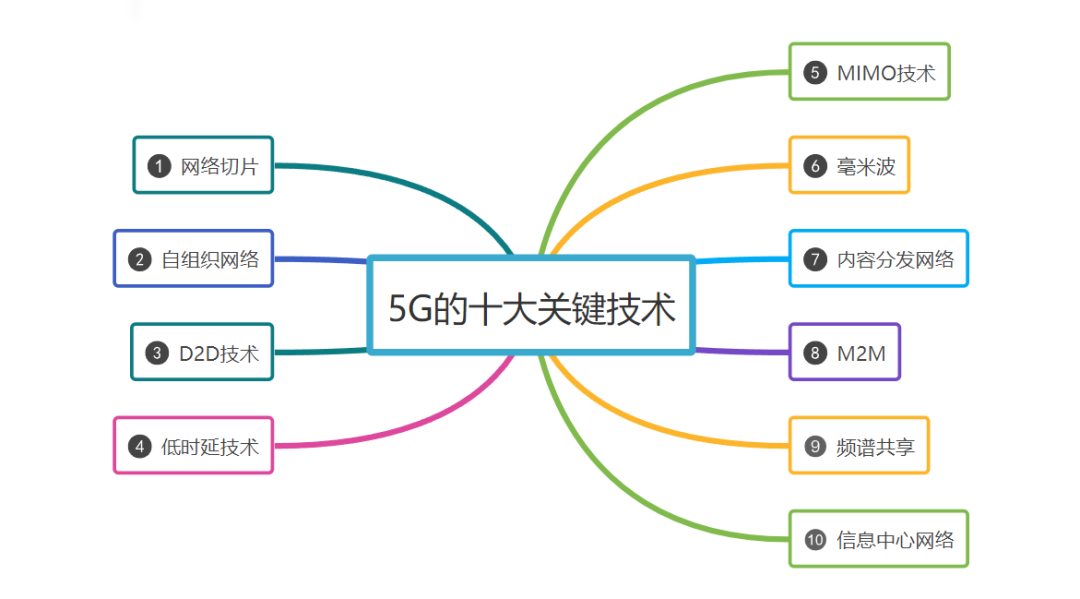
优点:蜂窝无线通信、不会因为距离远数据带宽下降、数据安全有保障、5G基站具备定位能力、MIMO、D2D以及低延时等技术,可以保证数据服务质量。
5G-A(5G-Advanced,又称5.5G)是5G技术的增强版本,相比传统5G,它在多个方面实现了显著提升,主要优势包括:
更快的网络速度:5G-A的理论峰值速率可达10Gbps,比普通5G(通常1Gbps左右)提升了约10倍。
更低的延迟:5G-A的延迟可低至1ms,普通5G通常在10-30ms。
通感一体化(通信+感知):5G-A基站不仅能提供通信,还能实时感知终端的位置、速度、轨迹,适用于无人机、车联网、低空经济等新场景。
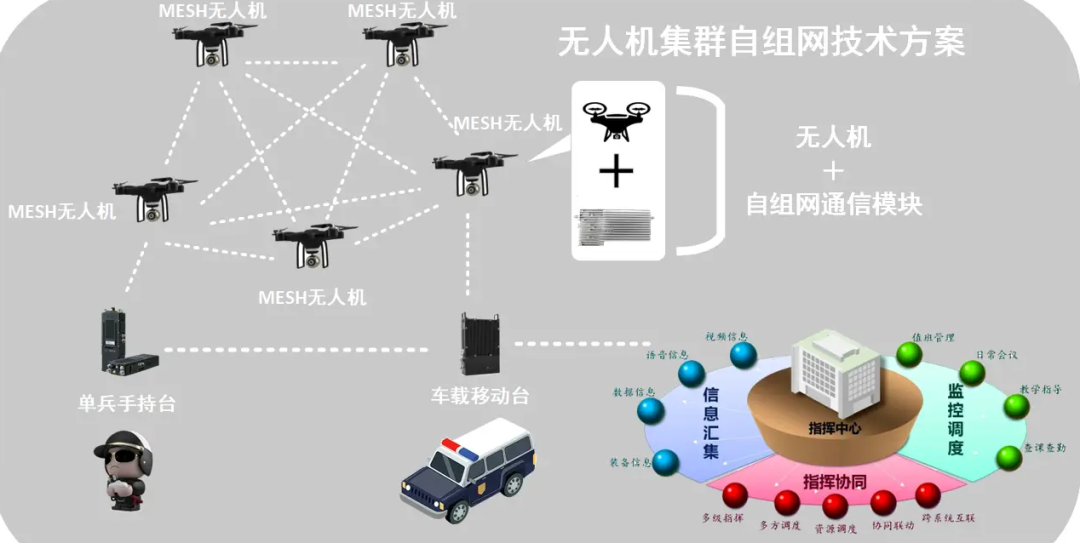
应急无线MESH自组网通信-AIBOX
特殊情况类似应急的情况,可能需要实现具备自组网的独立远程多点无线MESH的通信能力。
无线MESH的通信可以高效、快速组成无中心的无线宽带网络。支持多跳中继,能有效拓展无线网络的覆盖半径。无线MESH电台的网络具有自动选择最佳路由特性,自组织、自愈合,自动实现链式、星状等网络拓扑。
挑战二、飞行及位置服务
无人机无人化自主巡检按航线飞行有两个特点:
特点1:航点坐标要保证精度,才能保证每次飞行任务的重复准确执行
室外巡检需要基于RTK高精度定位飞行,室内飞行也需要高精度定位技术保障飞行。
- 室外巡检
通常在室外空旷的环境,RTK可以收敛并实现高精度定位。但是在附近有高层建筑等场景,RTK没有办法收敛定位,这就需要借助激光雷达SLAM,实现GNSS+LiDar+IMU的融合定位。这种融合定位算法技术是有具有挑战性的。
微文:WayFinder 集成 LiDAR 数据实时补偿缺失或错误的 GNSS 更新-在具有挑战性的 GNSS 条件下实现高精度定位
AIBOX实现了GNSS+LiDar+IMU的融合定位,在桥梁检测等RTK收敛和GNNS拒绝融合应用场景是必须的。
- 室内巡检
两条室内定位技术路线:
1:对于室内空间基本不变的环境,建议先建立空间的高精度三维建模,无人机采取基于已知地图的LIO激光里程计定位技术;
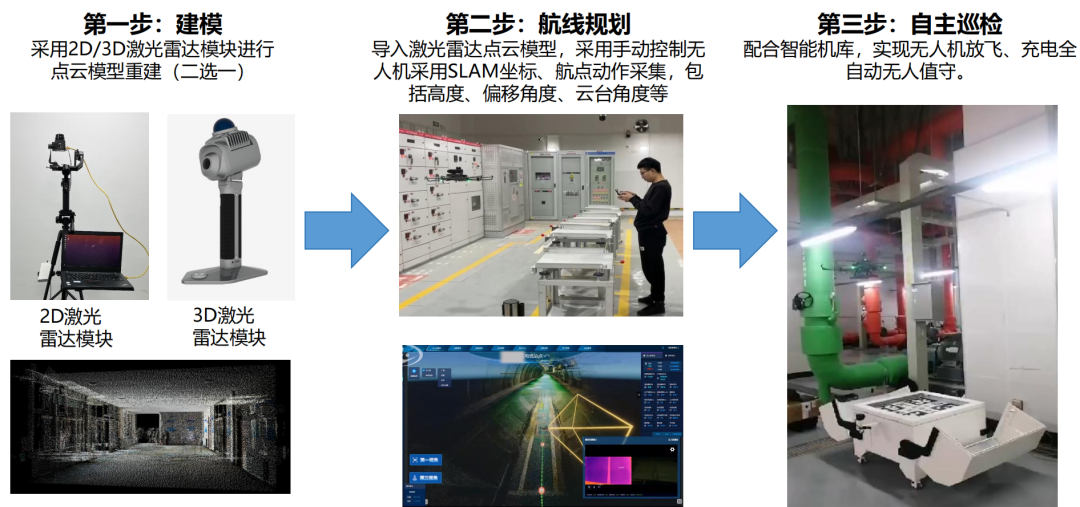
AIBOX支持基于离线三维点云地图+LIO激光里程计定位
2:对于室内空间有变化的环境,以及类似隧道这样没有办法提取地理特征的场景,需采用多模态3D空间协作定位技术实现无人机的高精度定位。
室内定位技术路线建议是多模态3D空间协作定位+LIO激光里程计的融合定位技术路线。
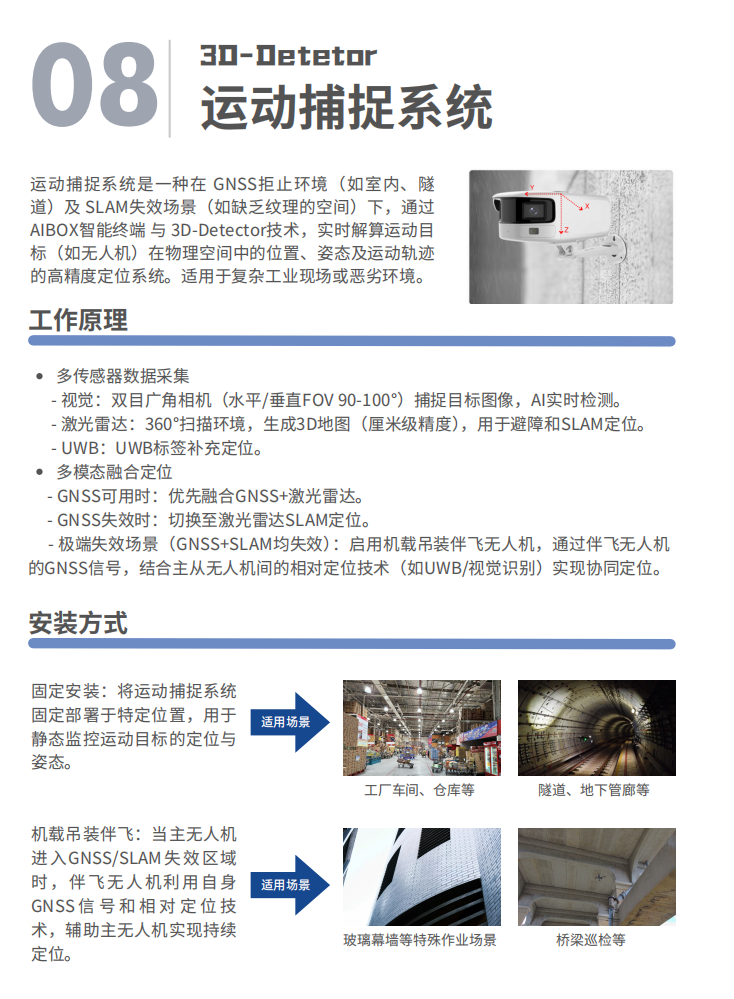
微文:多模态3D定位目标检测-3D_Detector技术白皮书
AIBOX支持基于多模态的运动捕捉高精度协同3D定位
特点2:规划航线的时候充分考虑了固定障碍物信息,实际飞行的时候还需要考虑一些突发的移动障碍物的情况
无论是室内还是室外巡检飞行,飞行安全永远是第一重要的事情。无人机本身的避障能力主要是感知近距离固定目标,对于移动目标需要增加激光雷达实现避障及动态局部路径规划。从大疆M4加载避障雷达可以看出这一技术路线的必要性。

避障雷达
全新避障雷达结合环扫激光雷达及毫米波雷达技术,配网交跨线路场景中可在 15 米/秒速度下实现 12 毫米导线级避障,且能在无光环境下辅助定位。即使面对环境多变的配网线路和线路复杂的变电站,也能精准避障,保障作业安全
AIBOX同样搭载了360°激光雷达实现避障感知增强以及动态局部路径规划
挑战三、智慧飞行
无人机无人化巡检飞行的目的有几种:
其一:定点拍照-拍照目的是读取数据(读表、或者读取二维码等),建议前端(机载)识别图片,这样才能提升飞行效率同时避免后台处理不及时或者异常导致重飞;
其二:定点发现目标-控制机载摄像机实现区域扫描,发现目标-建议前端(机载)识别,提升工作效率;
其三:在巡检路线发现异常事件-比如交通巡检发现交通事故,电力线巡检、桥梁巡检、铁路巡检、管道巡检发现漏气或者破坏等异常事件-此类巡检需要前端边缘AI能力,发现异常事件后,需要暂停航线飞行,执行异常处理机制后,再继续飞行巡检。
以上三种场景需求凸显了机载侧边缘AI的重要性,只有实现了智慧飞行的无人机才能称为人工智能无人机。
大疆无人机系列只有2025年3月的M4才具备边缘人工智能的能力,不同的应用环境需要无人机具备不同的边缘人工智能的能力,这就十分有必要扩展无人机的边缘AI的算力能力。
AIBOX具备了边缘算力的能力(32T),支持为客户定制边缘AI算法
巨视安防
,赞2
挑战四、无人化编队控制台
无人化编队包括自主无人机 (UAV)、无人地面机器狗 (UGV) 和无人船 (USV) 组成。无人机编队飞行可以提高单次完成任务的效率,指将多架无人机按照一定规则组成一个整体,实现 一些特定的任务。
允许执行体之间无缝转发信息,这意味着数据、视频、照片甚至控制命令都可以毫不费力地在不同的执行体之间传输,从而实现高效的数据共享和协调。实现了不同无人机执行体之间的无缝通信、协调和数据共享。

有几种情况需要编队飞行:对于大区域或者远距离的多架次无人机执行巡检任务,提升效率;比如高速公路的道路巡检、大型桥梁的巡检;抢险应急等特殊情况的不同功能性质的无人机的协同飞行。
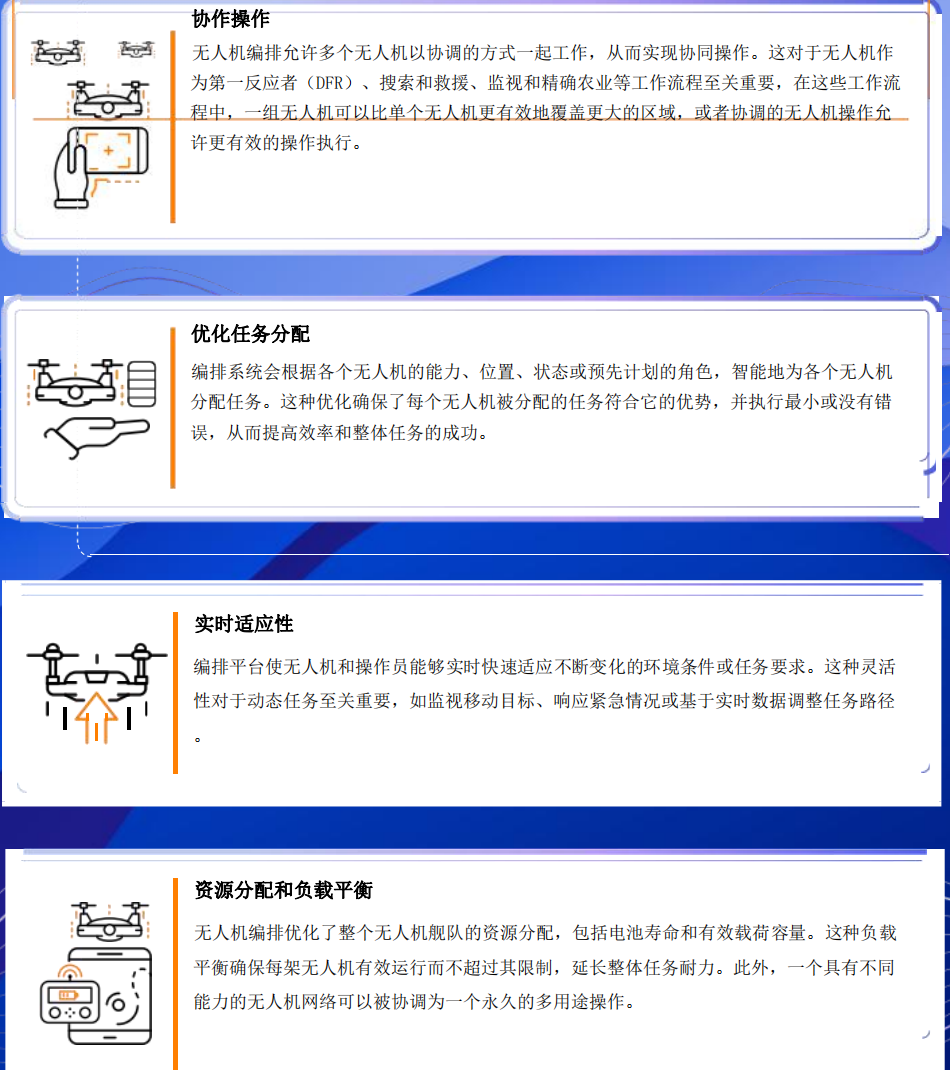
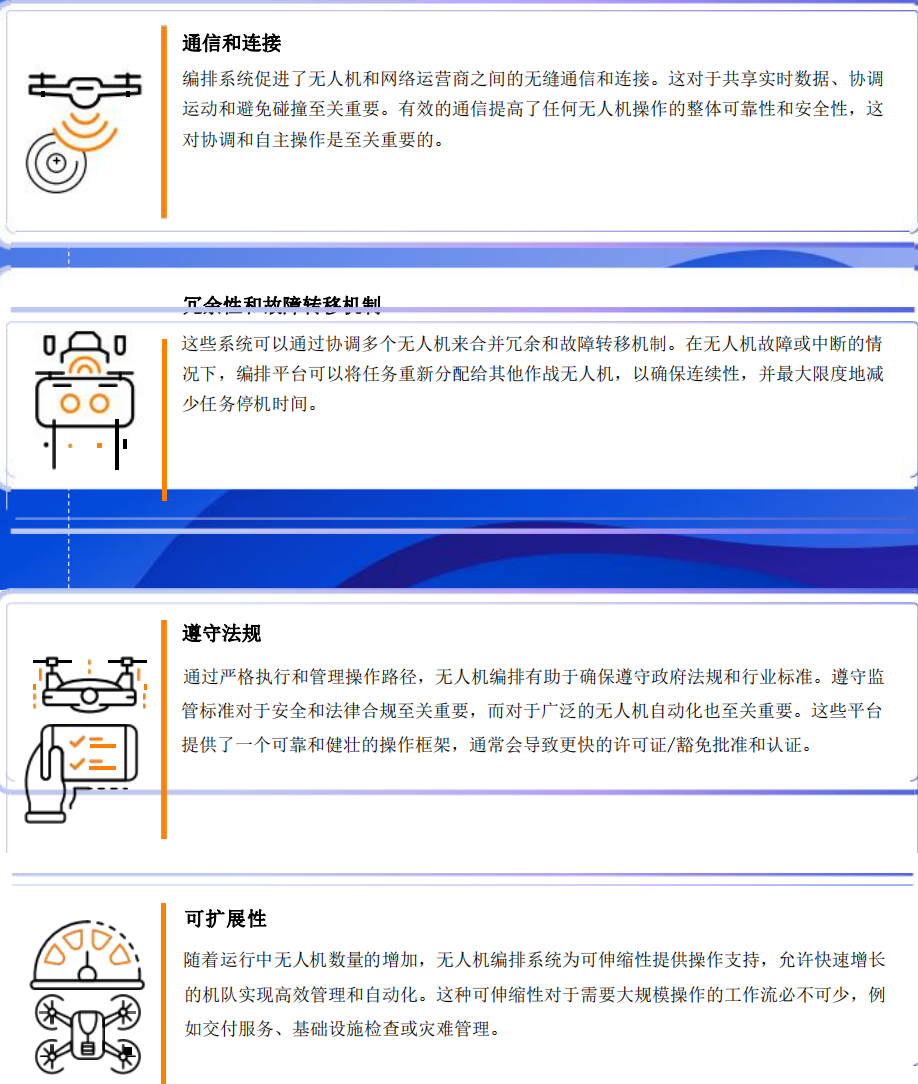
无人机编排是指在一个协作和互联的网络中系统地协调和管理多个无人机UAV。包括有效地分配任务,优化任务路径,并同步无人机的行动,以实现一个共同的目标。无人机编排利用了先进的软件和通信系统,以确保无缝协作、实时适应性和跨整个机队的资源的有效利用。
通过提供一个集中的监控、控制和决策平台,无人机编排提高了自主无人机操作的可扩展性、安全性和效率。这个框架对于释放无人机自动化的全部潜力至关重要,使不同的工作流程成为可能,如检查、监控、无人机作为急救人员、监视、搜索和救援、精确农业、物流,以及更大规模的应用。
以下是无人机的编排对于实现无人机自动化和复杂规模操作的全部潜力至关重要的一些关键原因: