一. 傅利叶为什么要开源?
2025年3月17日,傅利叶正式开源全尺寸人形机器人数据集Fourier ActionNet。
2025年4月11日,傅利叶正式发布首款开源人形机器人 Fourier N1。
傅利叶为什么要做这些开源工作呢?4月11日,在Fourier N1开源人形机器人线上媒体见面会上,傅利叶产品研发总监蔡宇圣对媒体记者提出的这方面的问题做出了很好的解答。
他表示,"机器人技术具有多元化、跨学科的特性,技术链路非常长,导致其进入门槛非常高。我们做开源的宗旨,简单来讲,就是希望加速行业社区探索具身智能机器人产品的进程。"
"虽然,一些机器人社区成立时间很早,但面对当下的机器人浪潮,社区体量却不足以支撑其高速发展。 傅利叶希望降低这个门槛,吸引更多的新鲜血液参与到这个行业里面来,包括正在观望的一些学者,或者感兴趣的学生等。"
"随着更多开发者的加入,我们相信会有更多别出心裁的思路能够融入到人形机器人产品中来,激发出更具建设性、更契合产品发展需求的修改意见,助力产品实现质的跨越。"
二、 傅利叶具体做了哪些开源工作?
随着数据集Fourier ActionNet,以及人形机器人产品Fourier N1的开源,傅利叶已逐步构建出其通用机器人生态网络,即"Fourier Nexus" 。它的构建是以机器人本体技术为基础,贯通算法开发、硬件制造与商业化应用的全链条技术共享平台。
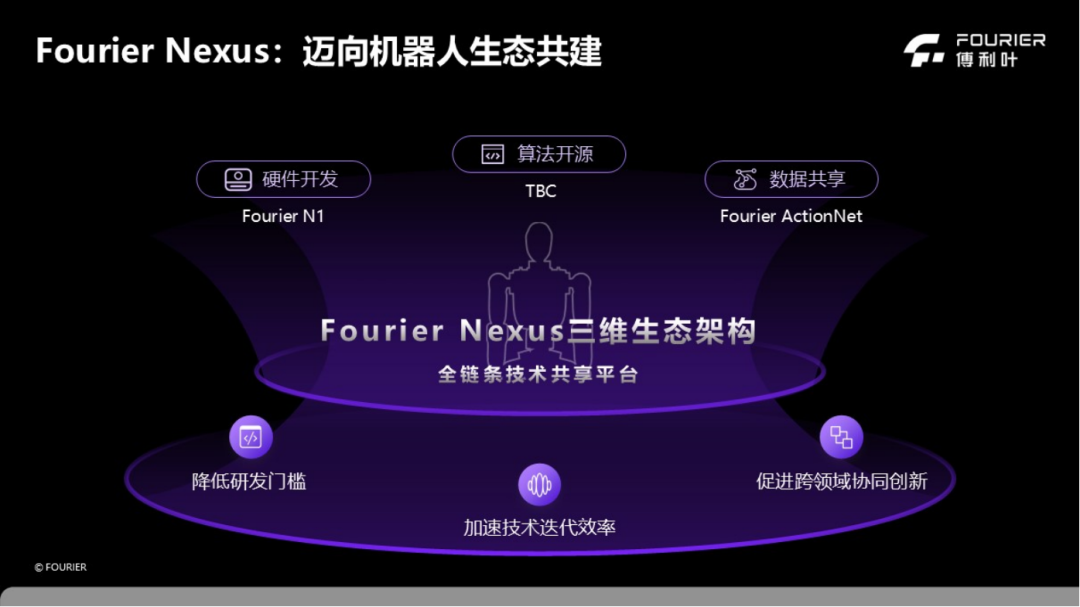
Fourier Nexus:迈向机器人生态共建
1) 硬件开发:Fourier N1
首批开源材料覆盖从硬件 到基础控制系统的核心构建要素,帮助开发者在最短时间内完成 N1 的完整复刻:
a. 硬件制造体系 ****:****完整物料清单(BOM)、可直接加工的结构图纸、详细装配指南与操作演示视频;
b. ****基础控制系统:****基础操作软件代码(已开放 GitHub)、通讯接口封装。
未来,傅利叶还将逐步开放针对该平台的推理代码 与训练框架,为全球开发者提供更加完善的验证与开发环境。
2)数据集及全流程工具链共享:Fourier ActionNet
Fourier ActionNet首批上线超++3万条高质量真机训练数据,++包含多种自由度灵巧手的训练数据及专门针对手部任务的模仿学习数据。Fourier ActionNet数据集囊括傅利叶GRx系列所有机型的各类任务训练,完整记录机器人在真实环境中的任务执行数据,涵盖了对++常++++用工具++++、家居用品、食物++等多种物体的精确取放、倾倒等操作,以及在不同环境条件下实现泛化执行。

遥操作机器人使用工具
除了数据集的开源以外,傅利叶同步开放了包含**++采集算法、训练算法以及数据部署算法++**的全流程工具链,最大程度上与全球开发者共享研究成果。开源的训练框架(如DP、ACT、iDP3)和部署工具,进一步降低了人形机器人技术研发门槛。
Fourier Nexus技术共享平台依托 **++"硬件开发 + 算法开源 + 数据共享"++**的三维架构,能系统性地降低研发门槛,加速技术迭代,促进跨领域协同创新,同时,也展现了傅利叶在推动人形机器人共建生态方面的长远决心。
三、傅利叶首款开源产品: Fourier N1
Fourier N1 是傅利叶的首款开源产品。在整机的用材方面,它主要应用铝合金与工程塑料。在体型上,相比GR-1(身高165cm,重量55kg)和GR-2(身高175cm,重量63kg),Fourier N1 (身高 131cm,体重 38 kg)体型明显要更小巧一些。
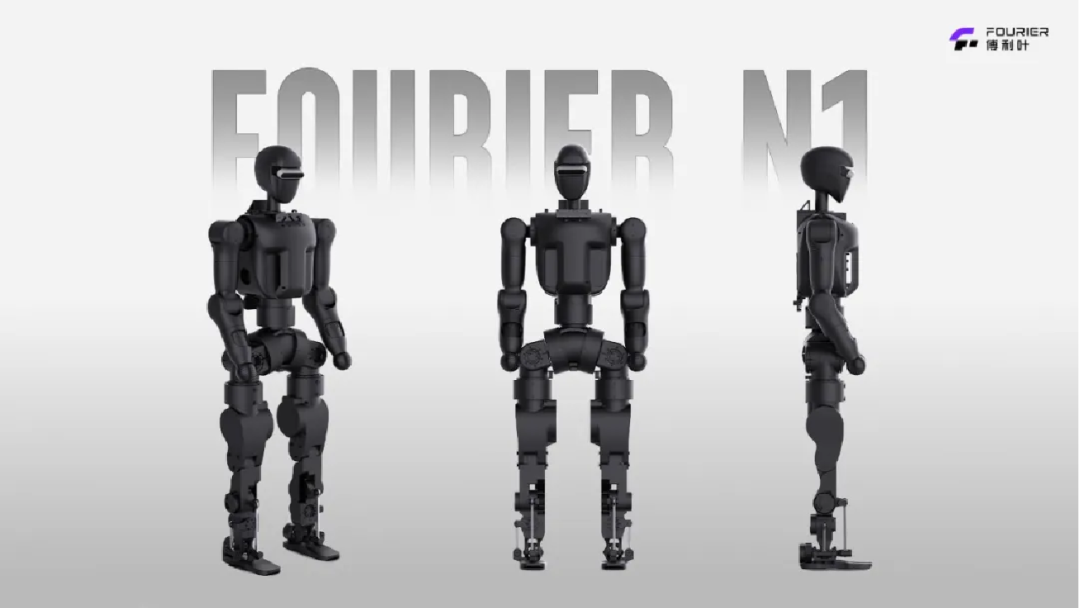
傅利叶首款开源产品:Fourier N1
虽然Fourier N1个头小,但是整体性能并不弱:全身自由度达到23个;在执行器方面,搭载傅利叶++自研的 FSA 2.0 一体化执行器,最大关节扭矩达96N.m,++再结合自研控制系统,在提升运动稳定性与抗冲击能力的同时,实现更高精度的位姿控制。据傅利叶透露,Fourier N1实测最高稳定奔跑速度可达 3.5 米/秒;在动力能源方面,电池采用背部插拔式设计,单次连续运动续航可达2小时以上,满足高频测试与便捷部署需求。
据蔡宇圣介绍,在Fourier N1的构型上,傅利叶花了很大功夫去钻研++Si++++m2Real gap问题、控制器设计的合理性以及现如今仿真技术和实际平台的映射++++关系,以及匹配度做到何种程度。++例如,在N1脚踝构型设计上做了一些小的创新,能够跟现有的仿真器更好地对应。
另外,针对行业里面普遍关注长时序机器人系统的稳定性问题。比如,过去在初始投入使用的第一个月,其运行状态良好,能够满足各项既定任务需求。然而,仅仅两个月之后,就不得不对控制器设计进行调试。这是由于随着时间的推移,机器人在机械结构以及整体设计层面均出现了衰变现象。傅利叶针对这方面做了很多测试工作,对系统进行了全方位改进。
例如,在工程验证环节,Fourier N1已累计完成++超过1000小时的户外复杂地形测试,单次连续运行时间超过72小时++,全面验证了其结构设计的稳定性、耐久性与环境适应性。同时,N1可稳定实现15°~20°坡度斜坡通行、20厘米高度楼梯攀爬、单足站立及撑地爬起等高难度动作,展现出卓越的本体可靠性与在非结构化场景下的运动鲁棒性。

Fourier N1高动态性能演示