目录
[1.2、安装 PX4 主固件、测试版固件或定制固件](#1.2、安装 PX4 主固件、测试版固件或定制固件)
1、QGC中升级固件
QGroundControl 桌面 版本可用于将 PX4 固件安装到 Pixhawk 系列 飞行控制器板。
警告
开始安装固件之前 与载具的所有 USB 连接必须 断线 (直接或通过遥测无线电)。载具必须 没有 由电池供电。
1.1、详细流程:更新加载固件
更新 PX4固件:
-
开始 QGroundControl 并连接载具。
-
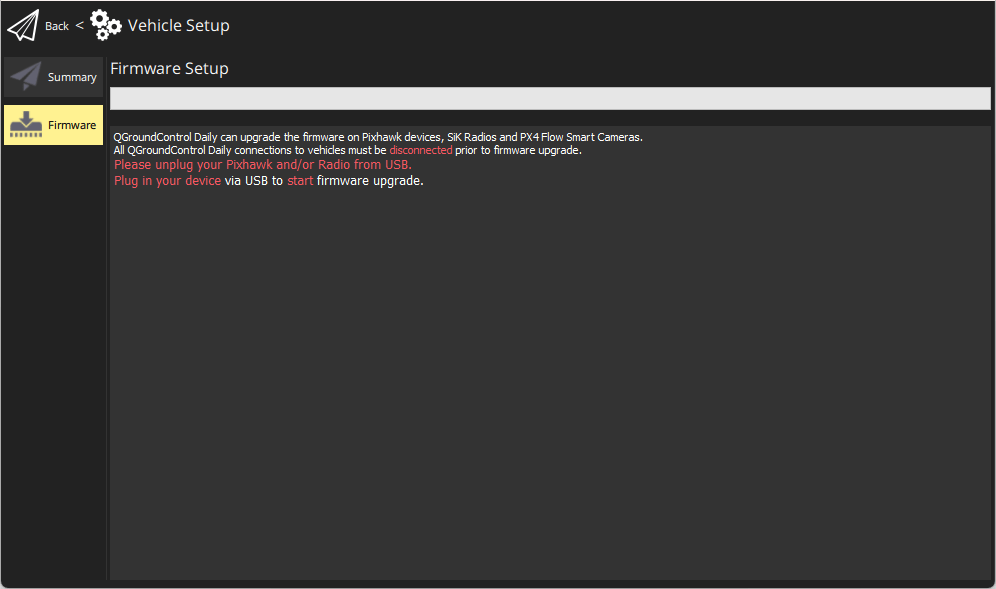
选择 Q" 图标 > 载具设置 > 固件 (侧边栏)打开 固件设置.
-
按照红字部分进行操作,红字提示拔掉usb以升级加载固件,然后再插上usb口,就会出现下图的提示
-
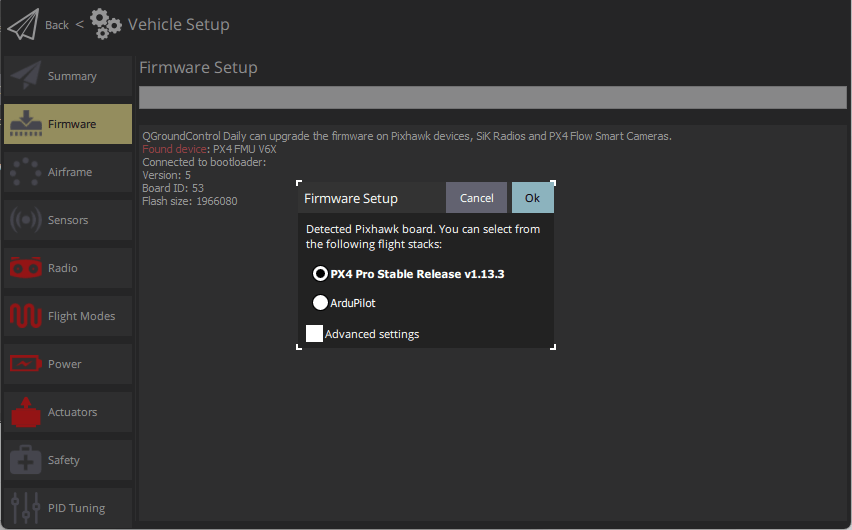
选择 PX4 Pro 稳定版 vX.x.x 选项来安装 PX4 的最新稳定版本 飞行控制器 (自动检测到)。
-
点击 好的 按钮开始更新。
然后,固件将进行一系列升级步骤(下载新固件、清除旧固件等)。每个步骤都会打印到屏幕上,整体进度会显示在进度条上。
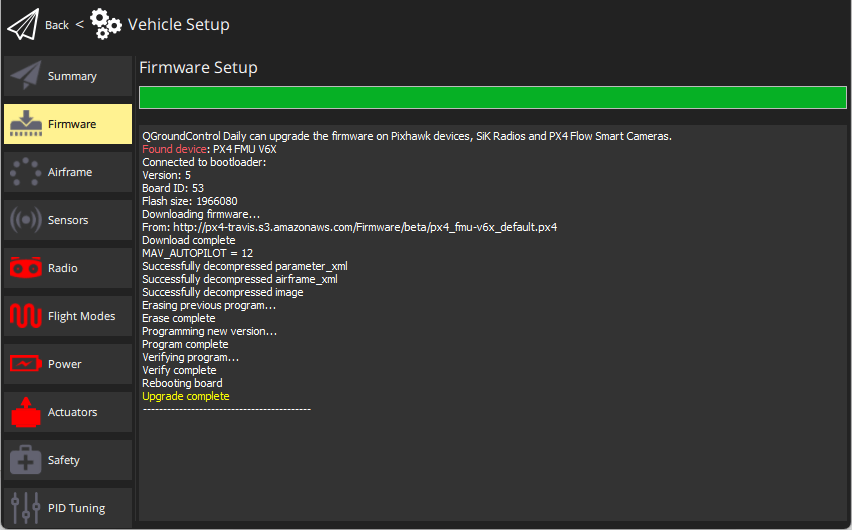
固件加载完成后,设备/载具将重新启动并重新连接。
1.2、安装 PX4 主固件、测试版固件或定制固件
安装不同版本的 PX4:
-
按上述步骤连接载具,然后选择 PX4 Pro 稳定版 vX.x.x .
-
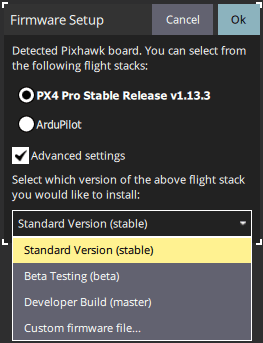
检查 高级设置 并从下拉列表中选择版本:
- 标准版本(稳定): 默认版本(即无需使用高级设置即可安装!)。
- Beta 测试(测试版): 测试版/候选版。仅在准备发布新版本时可用。
- 开发人员版本(主版本): PX4/PX4-Autopilot 的最新版本 主要 分支。
- 自定义固件文件.....: 自定义固件文件(例如 您在本地创建的).如果选择此选项,则必须在下一步中从文件系统中选择自定义固件。
然后继续进行固件更新。
2、加载指定版本固件
2.1、下载固件
参考:【飞控】Pixhawk系列飞控烧写PX4指定版本固件的方法_px4固件版本-CSDN博客
有时打开不了,多刷新几次,下载的网页: https://github.com/PX4/PX4-Autopilot
想要在飞控中烧录指定版本的px4固件,那么就需要去下载指定版本的固件文件。
进入PX4官方github找到页面右侧的Releases点进去:

在跳转的页面中找到需要的固件版本,可以点Tags查看列表方便查找。比如v1.11.0(翻了好多页才找到):

点进去在跳转的页面底部找到px4_fmu-v5_default.px4(对应Pixhawk 4),点击即下载。

PS:目前1.13以下的版本是可以直接下载固件版本的
更高的版本px4固件,下载的是源码文件,需要在px4编译环境中,编译生成固件文件
2.2、烧录固件
1、打开QGC,将Pixhawk 4飞控通过USB连接到电脑上,点击左上角图标,在弹出的 Select Tool 页面点击 Vehicle Setup,
2、点击 Firmware 进入固件烧写界面,选择 PX4 Pro ,勾选 高级设置 ,在下拉菜单中选择自定义固件文件(第4个选项)...,在弹出的页面中选择刚才下载的固件文件(px4_fmu-v5_default.px4)
3、点击 确定 ,按照提示插拔飞控即可完成固件烧写,此时查看 Summary 中的 机架 一栏中的 固件版本 应该显示1.11.0,大功告成!