1、问题描述
在组装完成无人机后,对无人机的电机进行测试
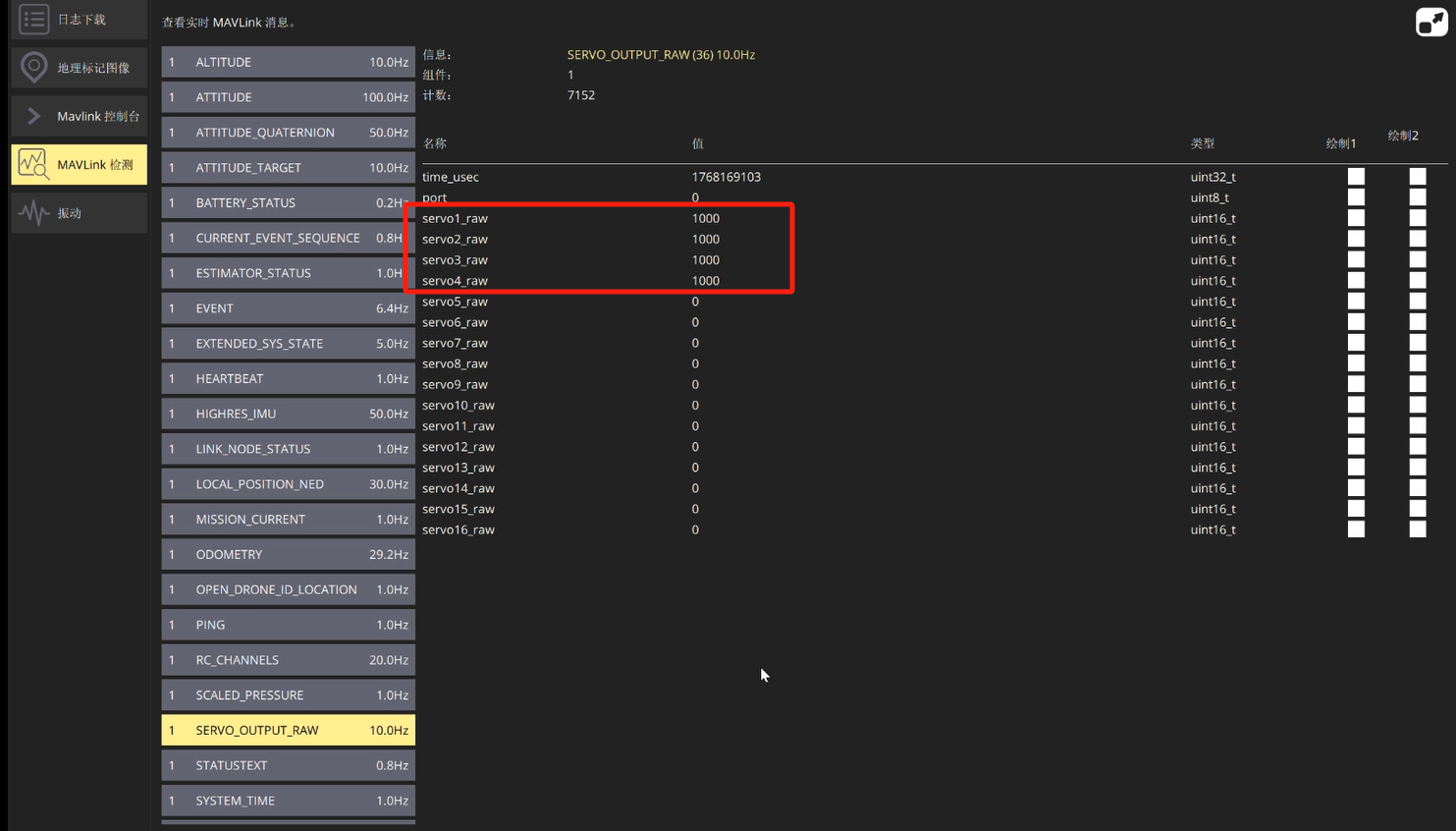
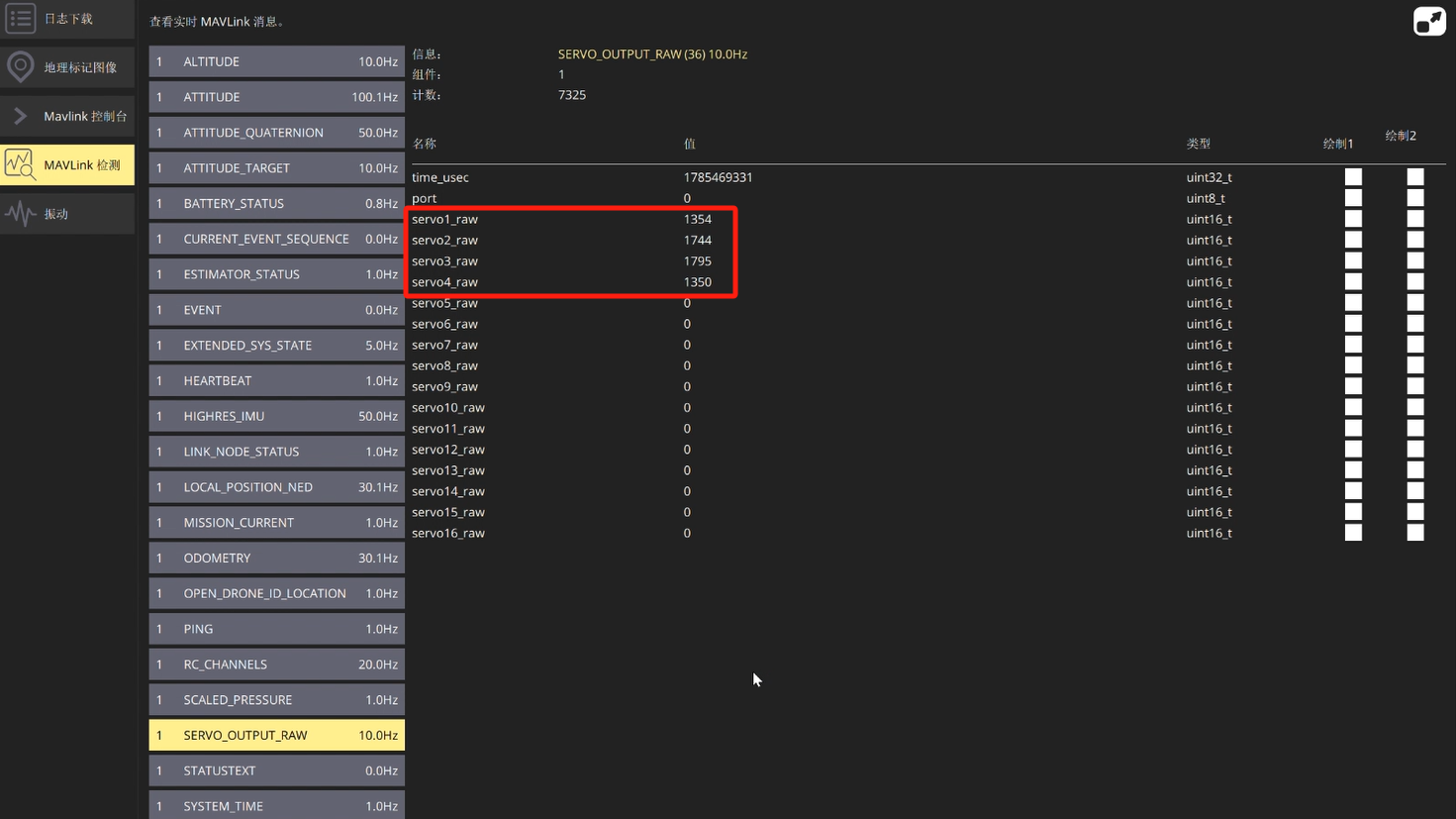
在MAVLink Inspector一栏中,点击SERVO_OUTPUT_RAW可以查看飞控输出的PWM信号。
无人机解锁(Armed)后,按照油门大小servo1/2/3/4_raw的值域为1000-2000,对应油门最低和最高位置。
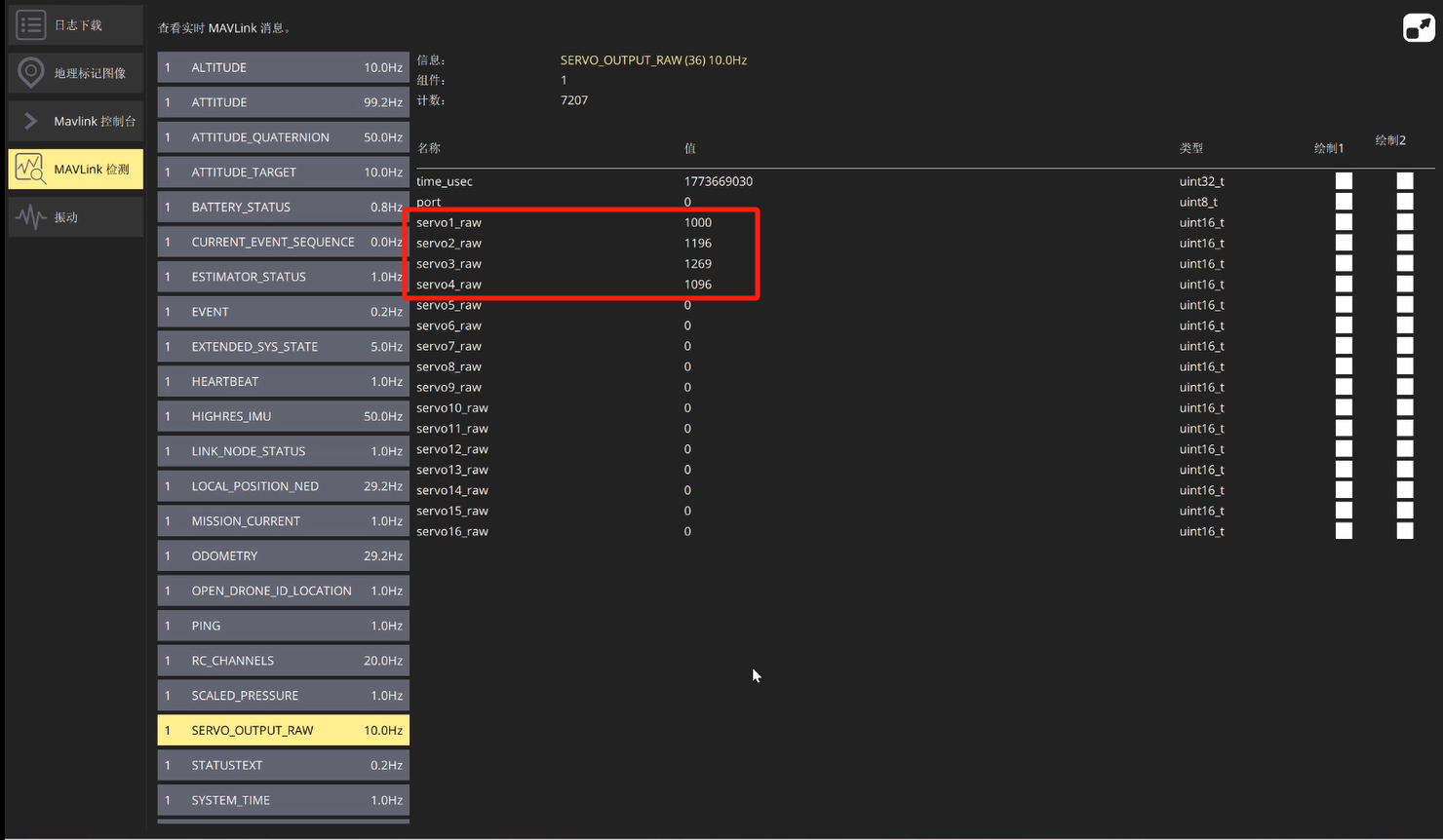
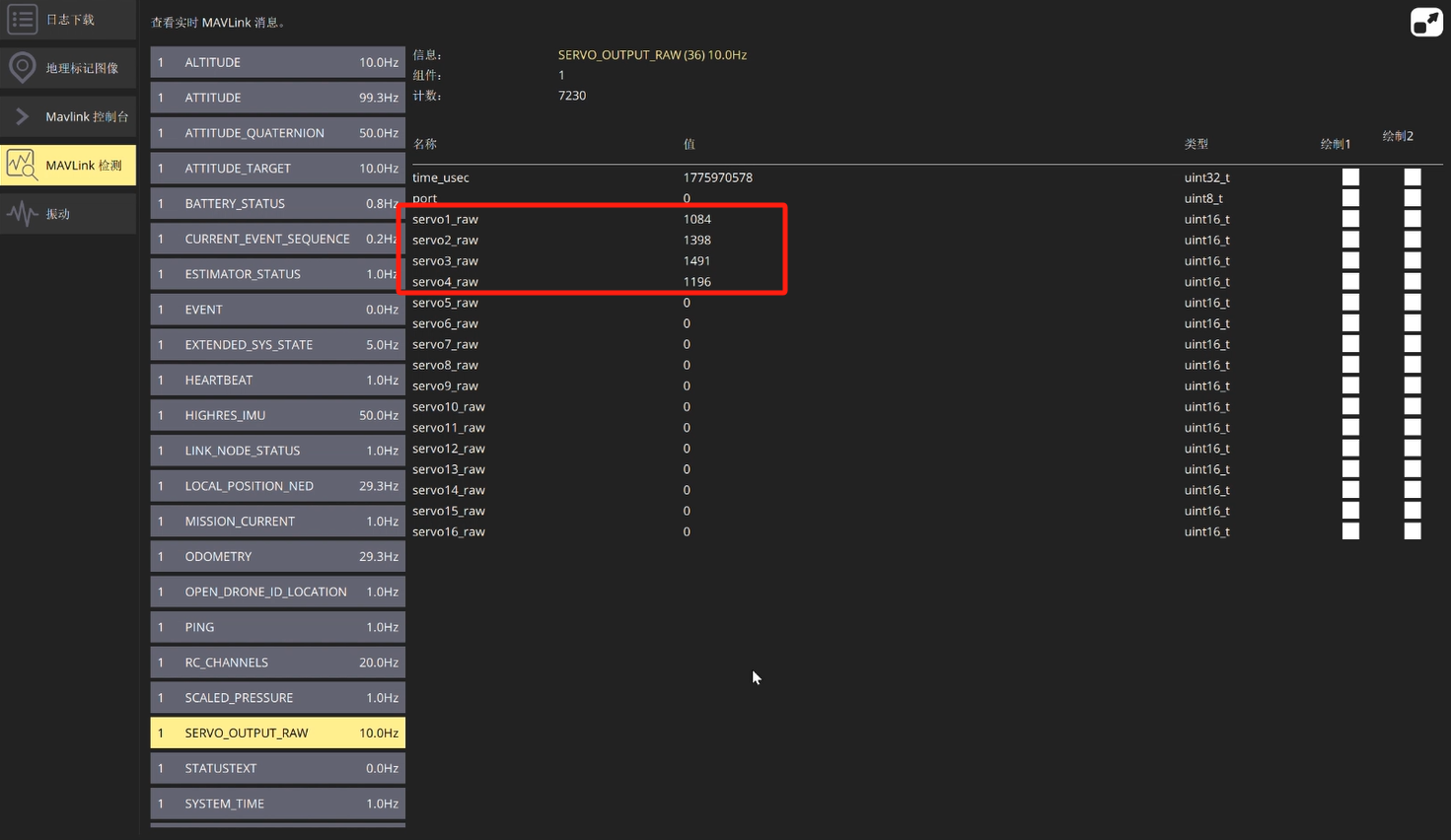
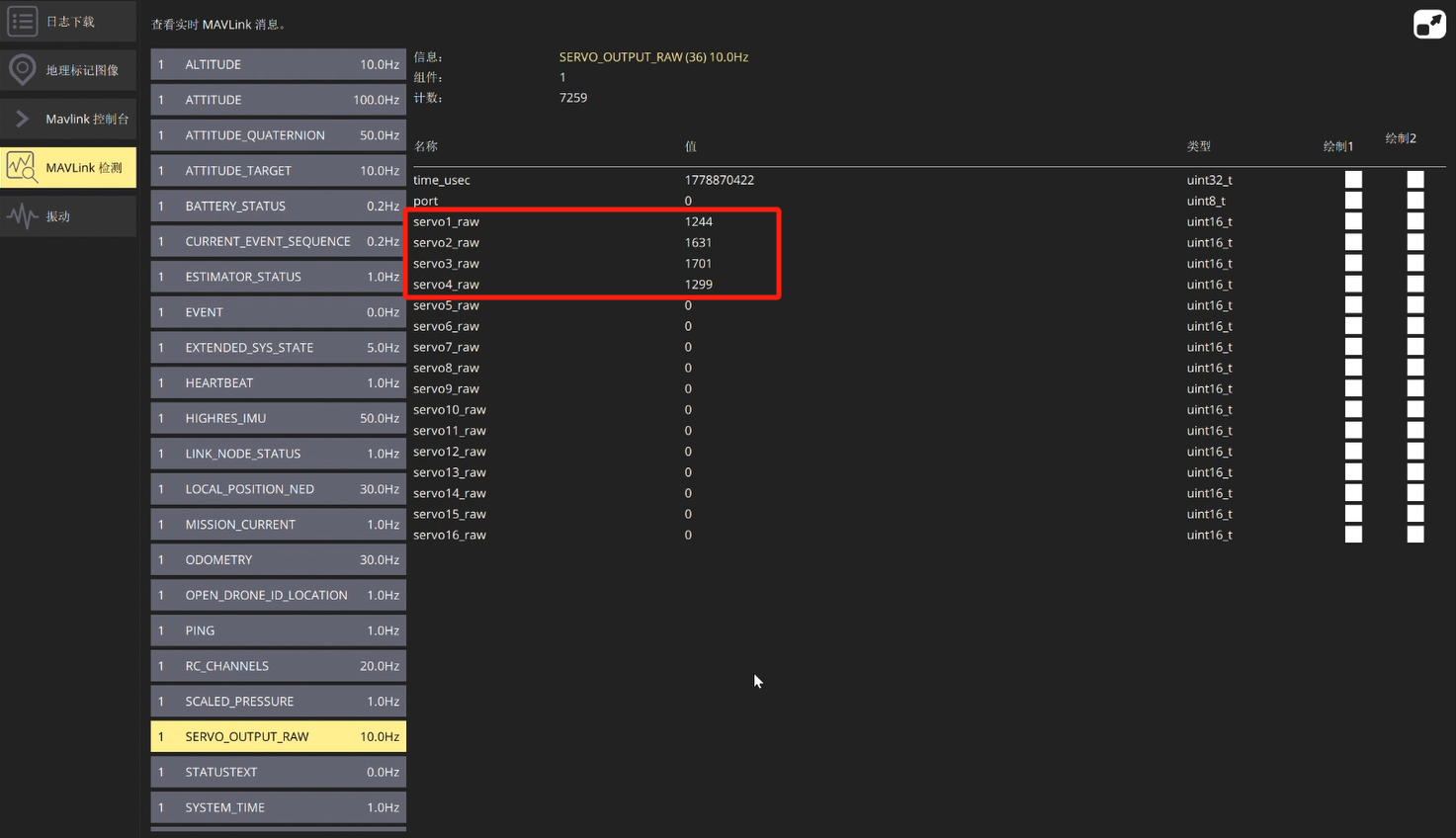
结果,在仅推动油门的情况下,四个电机输出的PWM信号不一致,也就是说四个电机的转速不一致。
按理说四个电机的转速应该是一样的才对啊,是为什么呢?
2、问题分析
1、现在一般都是dshot电调 是不用校准的。
如果没有安装桨叶,推油门飞机姿态不会按照飞控预测的姿态变化,所以飞控会按照控制逻辑修正电机转速,以便使飞机达到预计姿态 。
安装好桨叶后正常飞行就没有问题了