 在近期的自动化项目实施中,我们遇到了客户自主研发机器人主站与西门子PLC之间的通信挑战。由于客户机器人采用EtherCAT主站协议,而西门子PLC则采用Profinet通信协议,二者协议不同,无法直接通信。为解决这一问题,我们采用了稳联技术Profinet从站转EtherCAT从站网关WL-PNS-ECAT进行通信转换。
在近期的自动化项目实施中,我们遇到了客户自主研发机器人主站与西门子PLC之间的通信挑战。由于客户机器人采用EtherCAT主站协议,而西门子PLC则采用Profinet通信协议,二者协议不同,无法直接通信。为解决这一问题,我们采用了稳联技术Profinet从站转EtherCAT从站网关WL-PNS-ECAT进行通信转换。
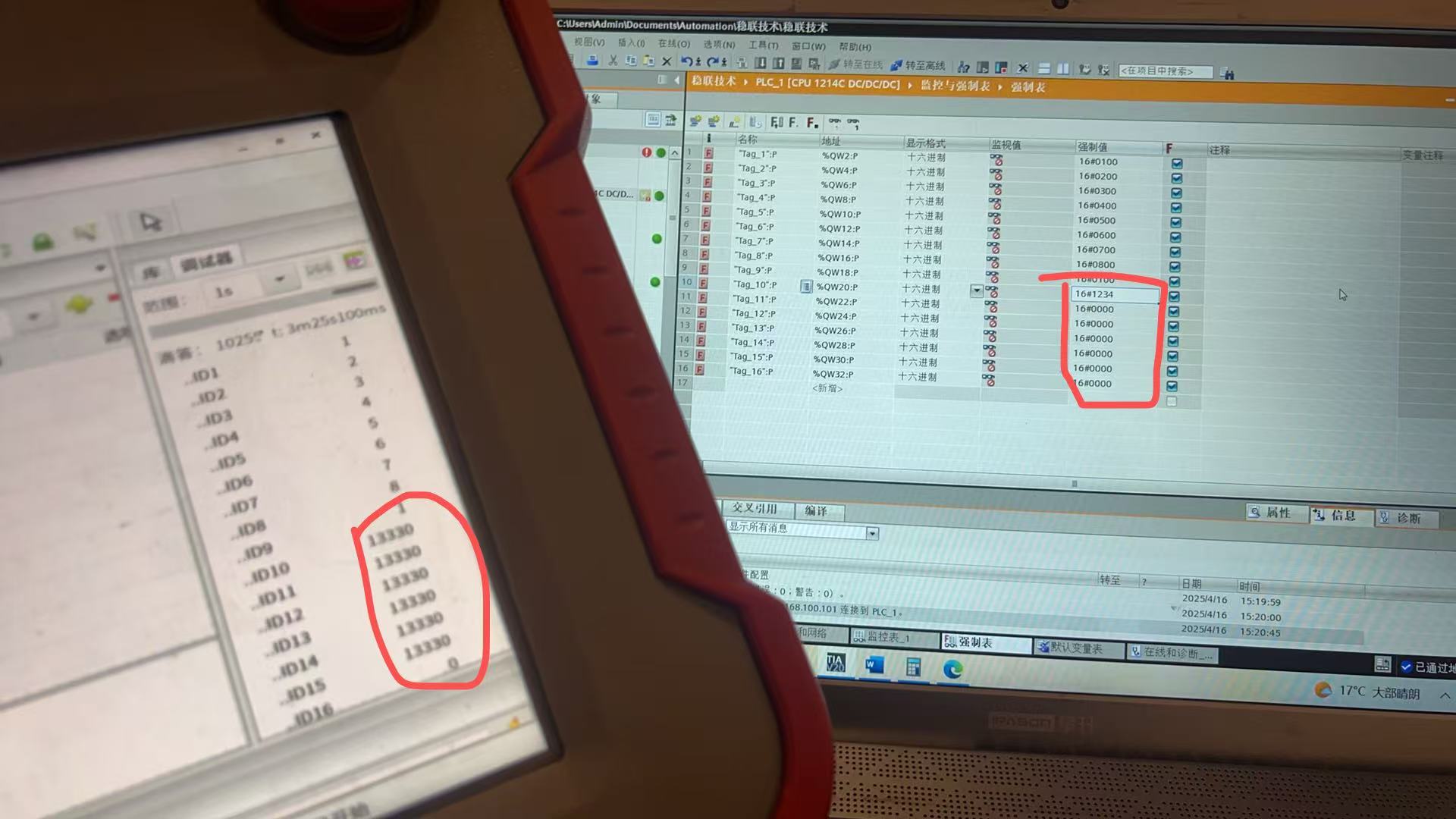
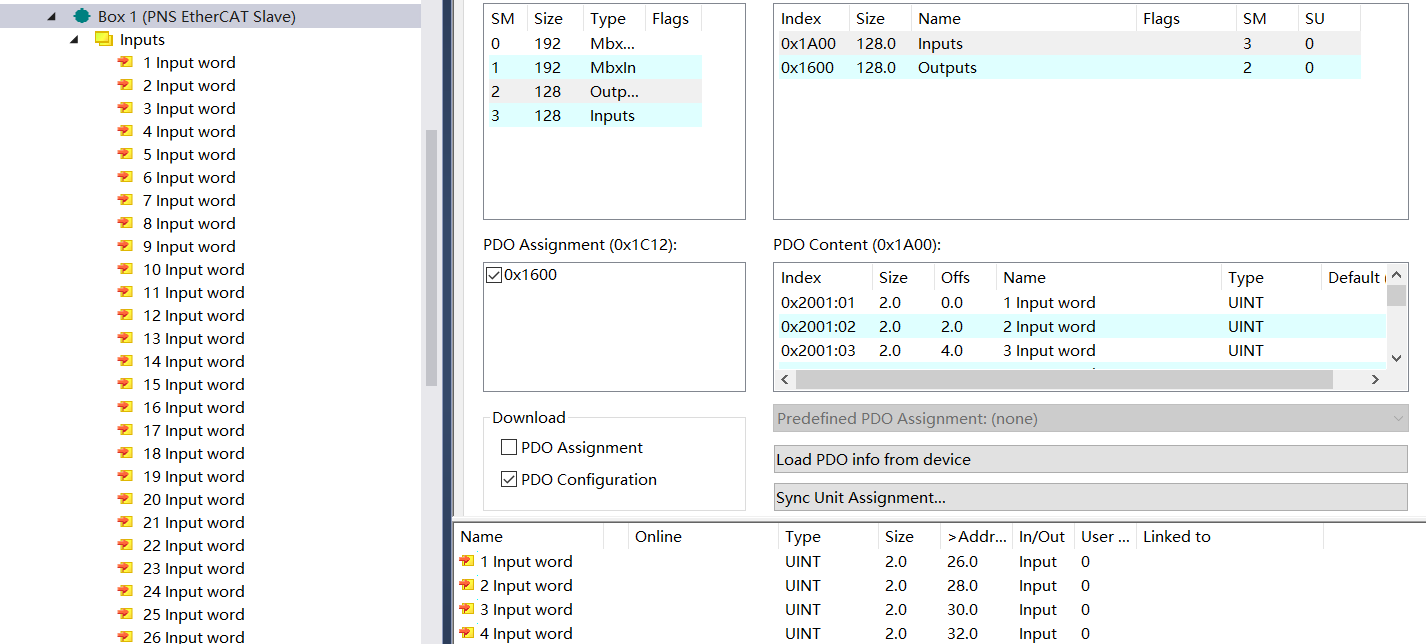
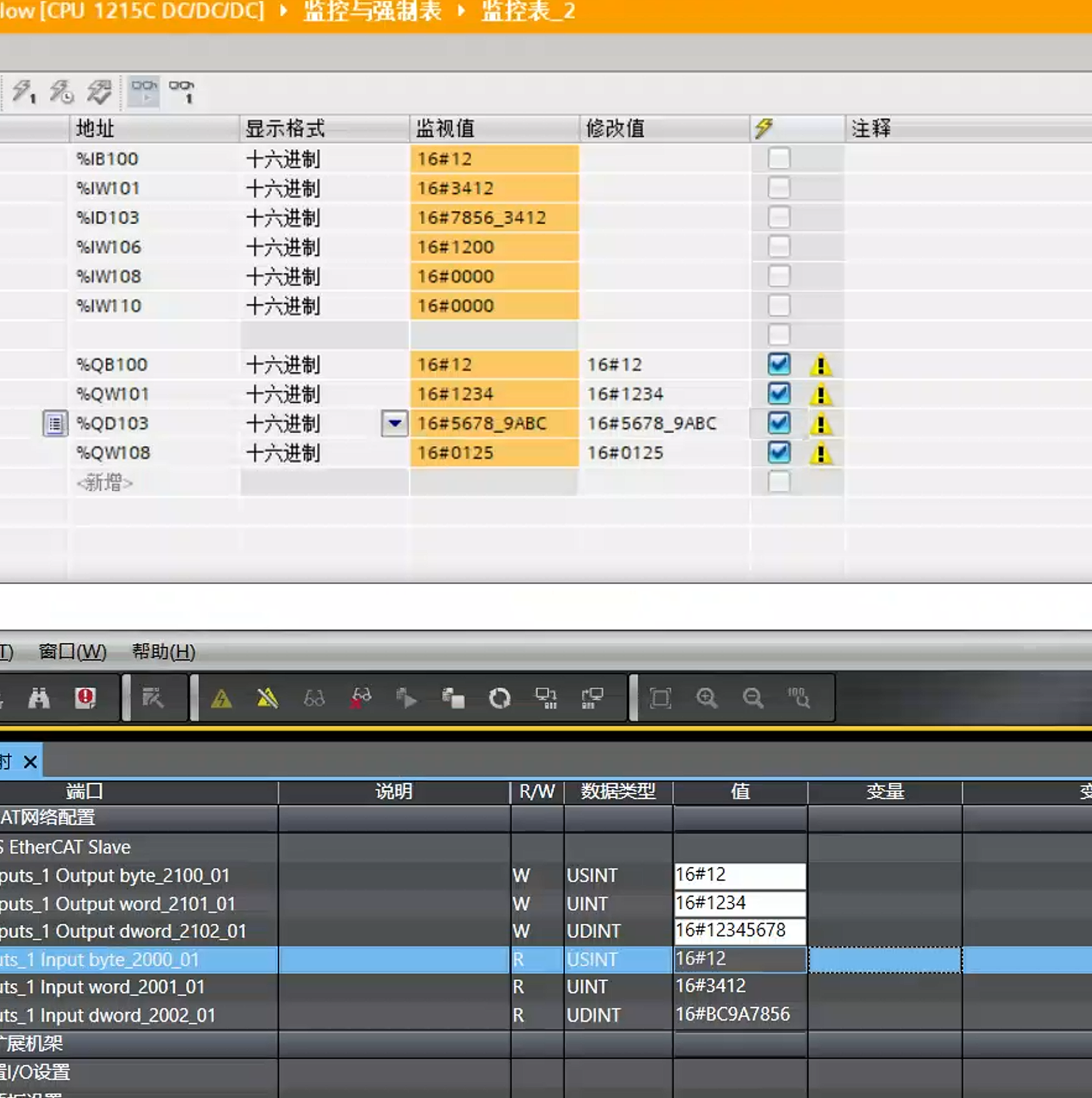
在现场调试过程中,我们发现市面标准网关设备的通用固件无法与客户自研机器人主站完全兼容,具体表现为数据映射异常、实时性不足以及周期性通信中断等问题。为此,我们深入分析了客户机器人主站的通信协议特性,重新设计了EtherCAT从站端的通信映射表,并对网关固件进行了二次开发和优化,确保网关能够准确地解析并实时传输数据。
经过固件调整和现场反复调测,我们成功实现了机器人主站与PLC之间的稳定实时通信。工业相机识别的OK/NG状态及位置数据能够实时准确地传输至机器人端,机器人顺利完成高速追踪、精准抓取和剔除动作。
本次经验表明,面对非标准化自主研发设备的通信集成,深入理解协议本质并适当定制开发是关键。通过技术攻关,我们不仅解决了客户的实际问题,也为国产自主研发机器人设备的兼容性与应用推广积累了宝贵经验。