名人说:路漫漫其修远兮,吾将上下而求索。------ 屈原《离骚》
创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊)
马克·雷伯特:用算法让机器人飞奔的人
一、天才的起点
在机器人领域,有一个名字如雷贯耳------马克·雷伯特(Marc Raibert) 。作为波士顿动力公司(Boston Dynamics)的创始人,他开创了一个全新的机器人时代,让原本僵硬笨拙的机器获得了如动物般的灵动与平衡能力。
雷伯特 通过其开创性的动态平衡控制算法,彻底改变了人们对机器人运动方式的认知,将机器人从工厂流水线解放出来,使它们能够适应各种复杂的实际环境。
图片:马克·雷伯特
1. 学术根基
雷伯特于1949年12月22日 出生于美国,他的学术之路始于东北大学,在那里他获得了电气工程学士学位。随后,他在1977年获得了麻省理工学院(MIT)的博士学位,其论文题为"通过状态空间模型进行的运动控制和学习",探索了如何使用机器人技术来模拟生物行为。
在学术生涯的早期,雷伯特分别在卡内基梅隆大学(1980-1986)和麻省理工学院(1986-1995)担任教授 。正是在卡内基梅隆,他创立了著名的腿式实验室(Leg Laboratory),这个实验室为高度动态机器人奠定了科学基础。
2. 从教授到创业者
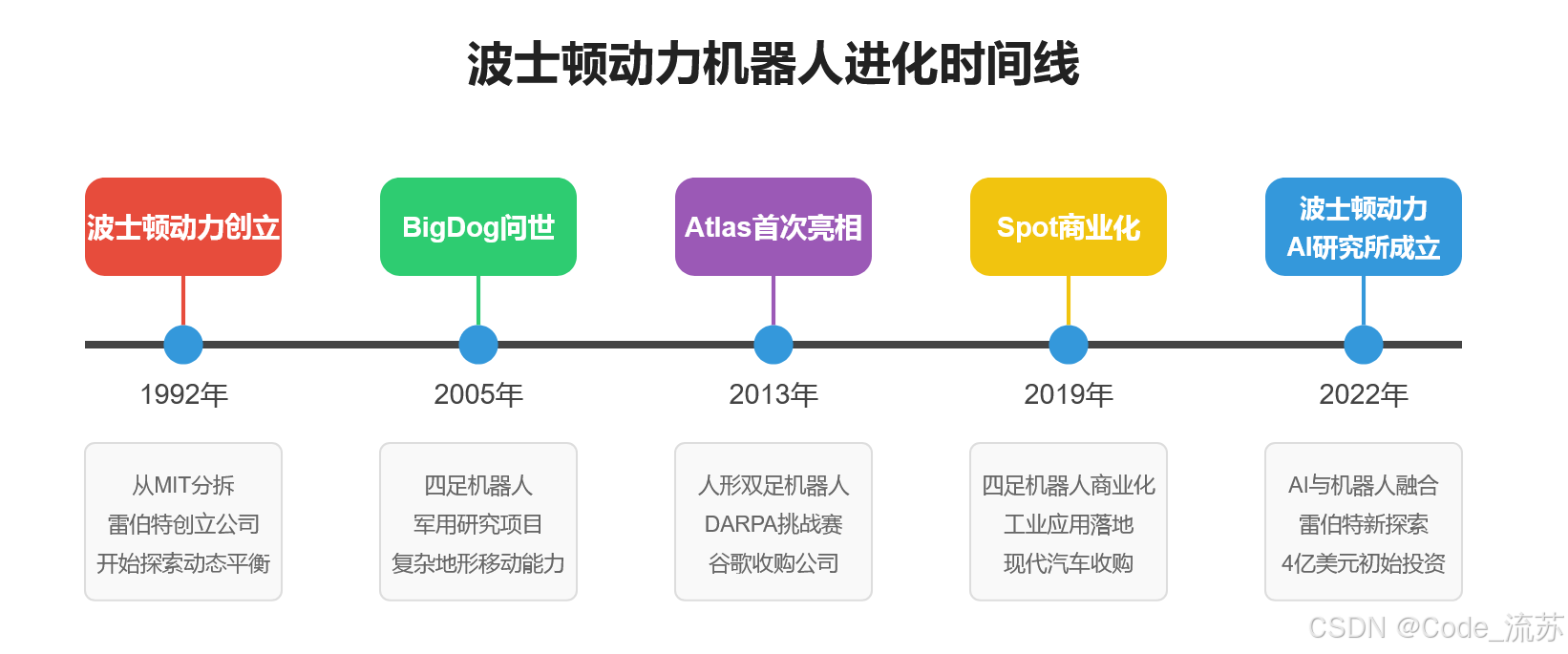
1992年,雷伯特从麻省理工学院分拆出来,创立了波士顿动力公司。有趣的是,当初他甚至不确定这将是一家机器人公司------他曾考虑过将其发展为一家建模和仿真公司。然而,命运的齿轮转向了机器人研发,尤其是在与索尼公司合作开发AIBO机器狗和QRIO小型人形机器人之后。
波士顿动力公司随后开发了BigDog四足机器人项目,这彻底改变了公司的方向。如雷伯特所说:"重新开始构建实体机器的感觉太棒了,我再也没有回头"。
二、突破性算法
雷伯特在机器人领域的最大贡献是他对动态平衡控制算法的开创性研究。
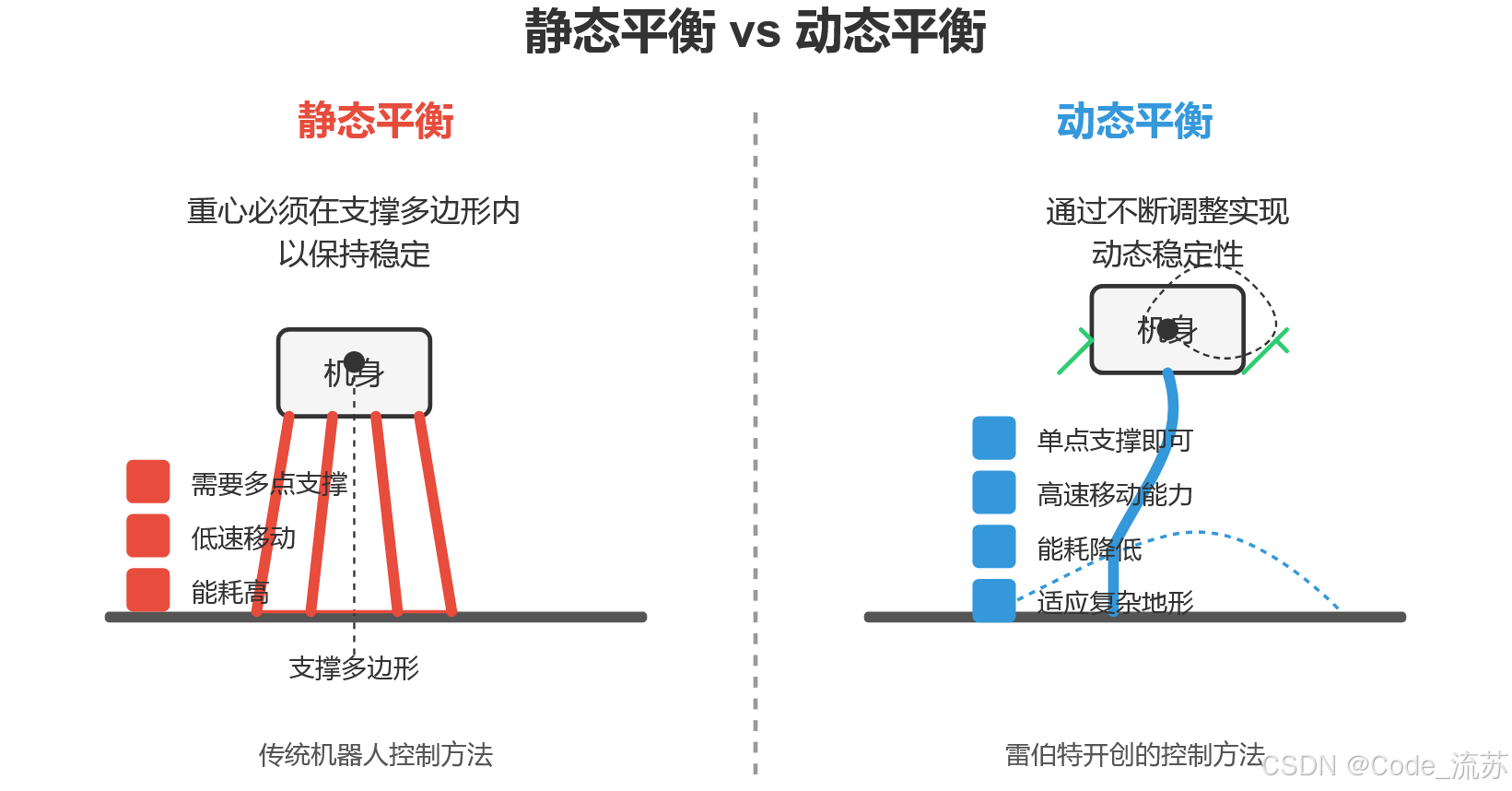
在他之前,大多数机器人都采用静态平衡方法 ,需要保持重心始终在支撑面内 。而雷伯特的方法则完全不同,他从动物运动中获取灵感,开发了一系列突破性算法。
1. 单腿跳跃机器人
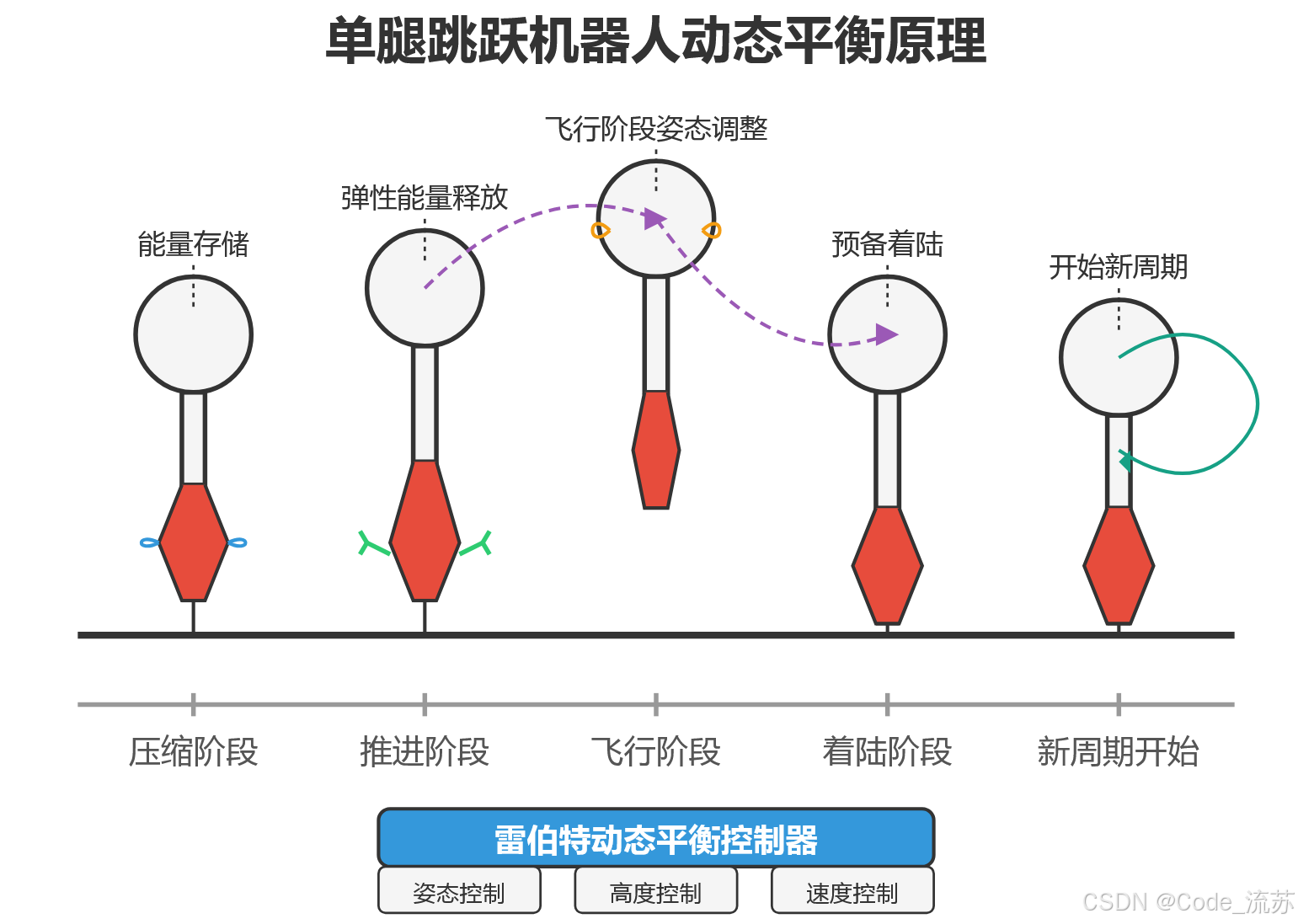
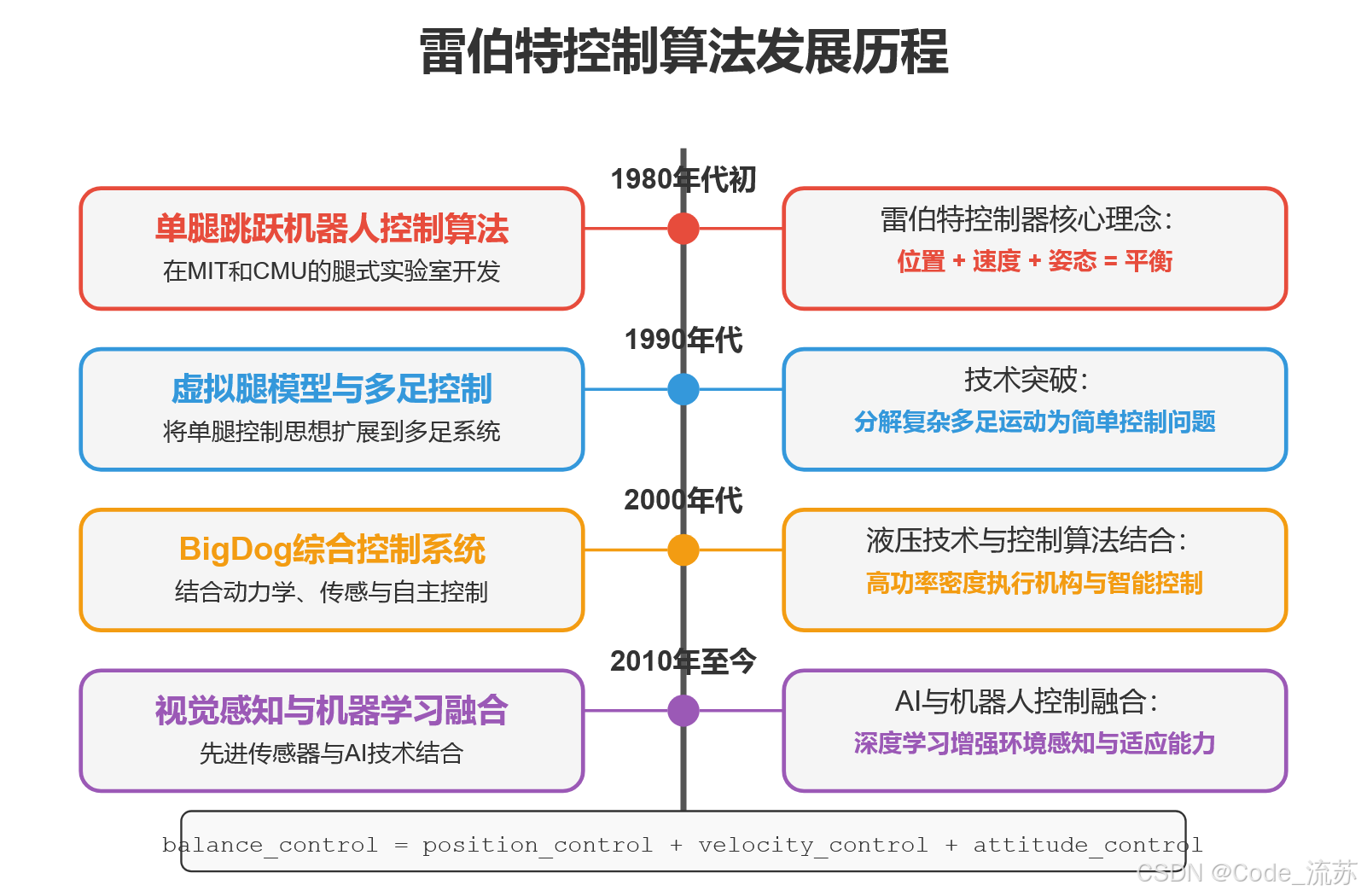
雷伯特早期最著名的成就是开发了第一个自平衡跳跃机器人。这个看似简单的成就实际上是机器人学领域的重大突破。他通过研究单腿平衡问题,揭示了动态平衡的核心原理:
平衡控制 = 位置控制 + 速度控制 + 姿态控制这个被称为"雷伯特控制器 "的算法成为了后来所有动态机器人的基础。该算法的本质是将平衡问题分解为三个子问题:控制支撑腿的长度(高度控制)、控制身体的姿态(角度控制)以及控制水平速度(速度控制)。
2. 从单腿到多足
成功解决单腿平衡问题后,雷伯特将研究扩展到双足和四足机器人。他发现,多足机器人可以通过虚拟腿模型来简化控制。即使是复杂的四足机器人,在奔跑时也可以被抽象为一个单腿模型,这大大简化了控制算法。
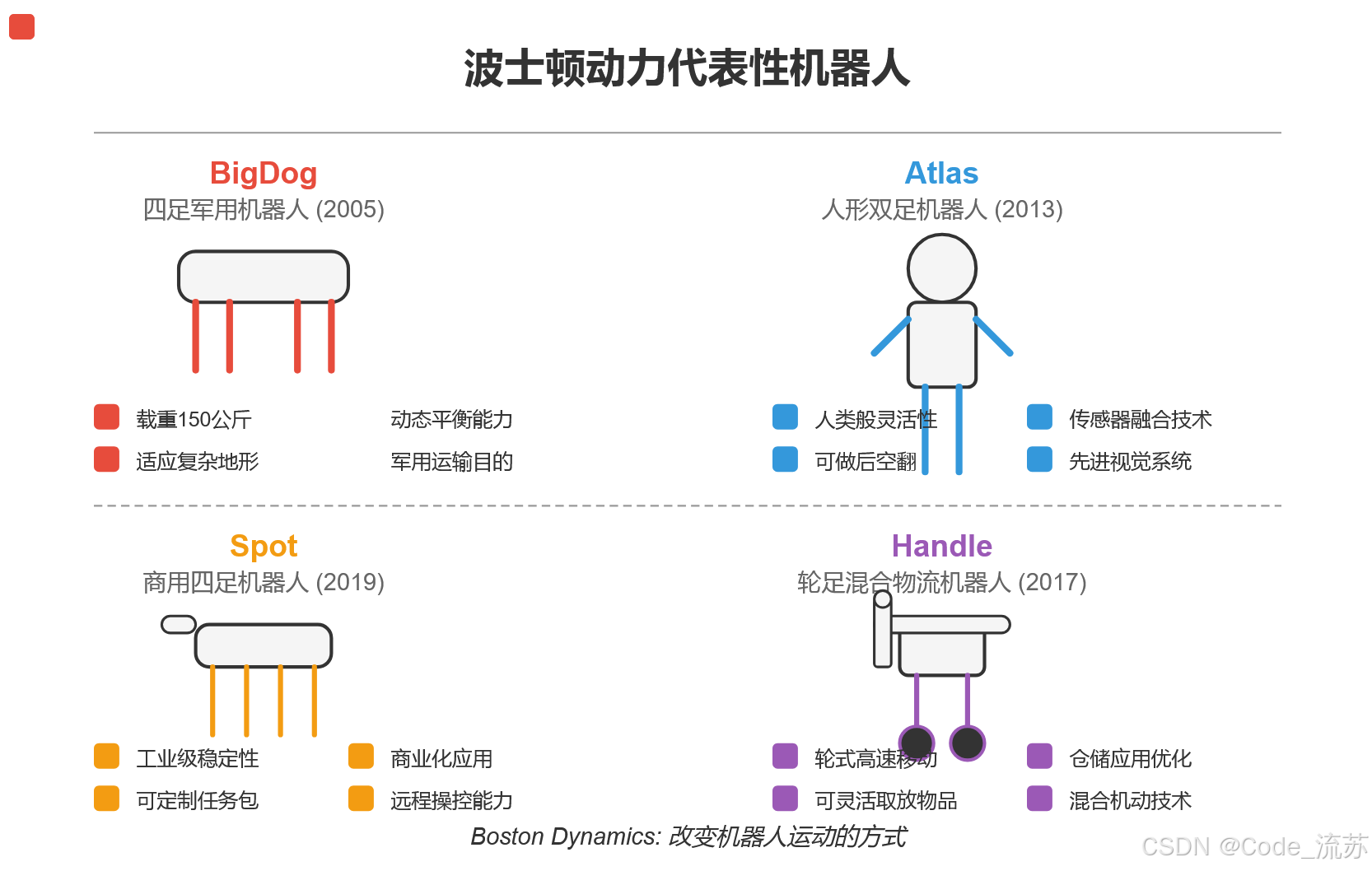
这种思路引领波士顿动力开发了一系列革命性的机器人,从BigDog到Atlas,再到Spot和Handle,每一代产品都在动态控制、平衡能力和环境适应性方面取得了显著进步。
3. 核心技术突破
雷伯特团队在机器人控制算法方面有几个关键突破:
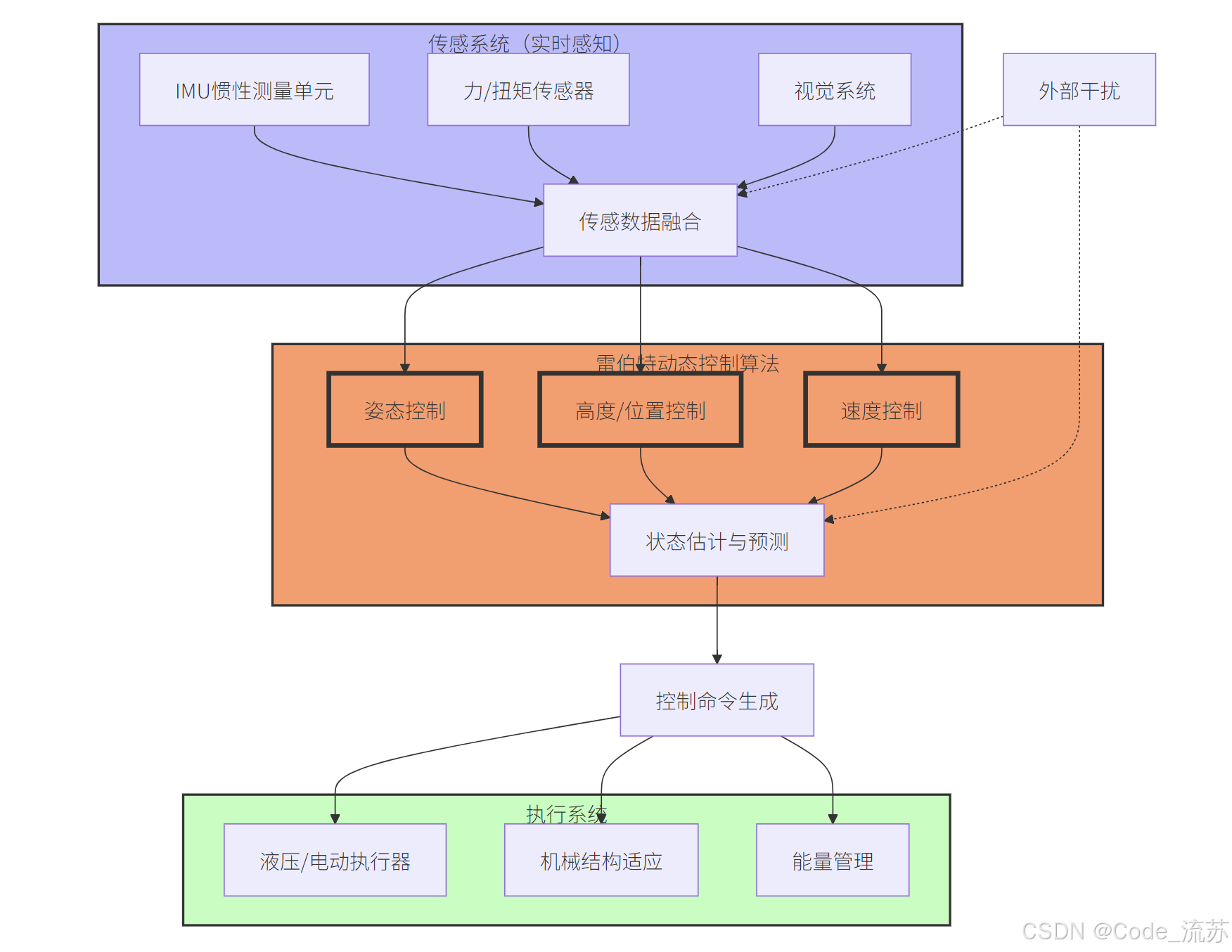
- 动态控制算法:允许机器人在运动中保持平衡,即使在受到外力干扰的情况下
- 实时传感与反馈:利用IMU(惯性测量单元)、力传感器和视觉系统进行快速感知和反应
- 仿生学启发的运动方式:研究动物的运动方式,将其应用于机器人设计
- 集成式制造:使用3D打印技术创建机器人腿部,将执行器和液压管路嵌入结构中
三、从军用到商用
波士顿动力公司的发展历程也反映了机器人技术从军事应用到商业化的转变。
1. 军民两用的技术路线
波士顿动力公司早期得到了美国国防高级研究计划局(DARPA)的大力支持,开发了如BigDog这样的军用机器人。这些机器人被设计用来在复杂地形中协助士兵,能够负重行走并克服各种障碍。
随着技术的成熟,波士顿动力开始关注商业市场。2019年,公司推出了商业版四足机器人Spot,这标志着公司从研究导向转向了产品导向。Spot机器人被应用于建筑检查、油气管道巡检、核电站监测等领域。
2. 三次收购的背后
波士顿动力公司先后被谷歌(2013年) 、**软银(2017年)和现代汽车集团(2020年)**收购,每次收购都反映了不同的战略方向:
- 谷歌时期:注重前沿技术探索和基础研究
- 软银时期:开始着手商业化落地
- 现代汽车时期:进一步推进产品化和规模化应用
值得注意的是,2022年8月 ,雷伯特在现代汽车集团的支持下,创立了波士顿动力AI研究所,初始投资超过4亿美元,目标是"解决创造先进机器人面临的最重要和最困难的挑战"。这表明雷伯特仍在坚持他的长期技术愿景。
四、算法中的艺术
雷伯特对机器人的理解超越了纯技术层面,他看到了机器人中的艺术性。波士顿动力经常发布机器人跳舞、做后空翻等视频,这些不仅展示了技术实力,也体现了雷伯特对机器人美学的追求。
1. 技术与美学的结合
在雷伯特看来,机器人的动作不应该是机械僵硬的,而应该像动物或人类一样流畅自然。这种理念体现在他对机器人设计和控制的每一个细节中:
- 流体动力学:机器人的运动轨迹设计成曲线而非直线
- 能量效率:模仿生物利用动能和势能转换的方式
- 适应性行为:根据环境反馈动态调整运动方式
这种将工程学与生物学、艺术美学相结合的方法,让波士顿动力的机器人拥有了独特的"个性"。
2. 未来展望
如今,雷伯特的目光已经投向了机器人与AI的融合。在波士顿动力AI研究所,他关注的核心问题包括:
- 如何让机器人更好地理解和操纵物体
- 如何通过观察学习实现更高效的任务掌握
- 如何开发更通用的机器人能力而非专用功能
雷伯特认为,未来50年,机器人将获得像人类一样的灵活性,能够胜任各种各样的任务,而不需要针对每个任务进行专门编程。
五、启示与思考
雷伯特的故事给我们带来了许多启示。
1. 坚持长期愿景
从学术研究到创立公司,再到建立研究所,雷伯特始终坚持他的愿景------创造能像动物一样自然移动的机器人。这种坚持贯穿了他40多年的职业生涯。
2. 跨学科思维的力量
雷伯特的成功很大程度上归功于他能够将机械工程、控制理论、生物学和计算机科学等不同领域的知识融会贯通。正是这种跨学科的思维方式,让他能在机器人领域取得开创性成就。
3. 技术向商业转化的艺术
波士顿动力从一个研究为主的企业成功转型为一个有商业产品的公司,这个过程充满挑战,但也证明了尖端技术最终能够转化为实用的产品。
马克·雷伯特用算法让机器人奔跑,用创新重新定义了机器人的可能性 。他的故事告诉我们,伟大的技术突破往往来自于对自然的谦卑观察和大胆的创新思维。
当我们今天看到那些灵活自如的机器人时,不妨记住这位"让机器人飞奔的人"及其背后的不懈探索精神。
注:本文是CSDN博客"计算机名人堂"系列的一部分,旨在介绍计算机科学领域的杰出人物及其贡献。
专栏✅ :《计算机名人堂》,欢迎订阅催更,谢谢大家支持!
创作者:Code_流苏(CSDN)