本章节完成停车场监控视频中停车位实时情况的动态识别。
首先,来做图像的预处理。
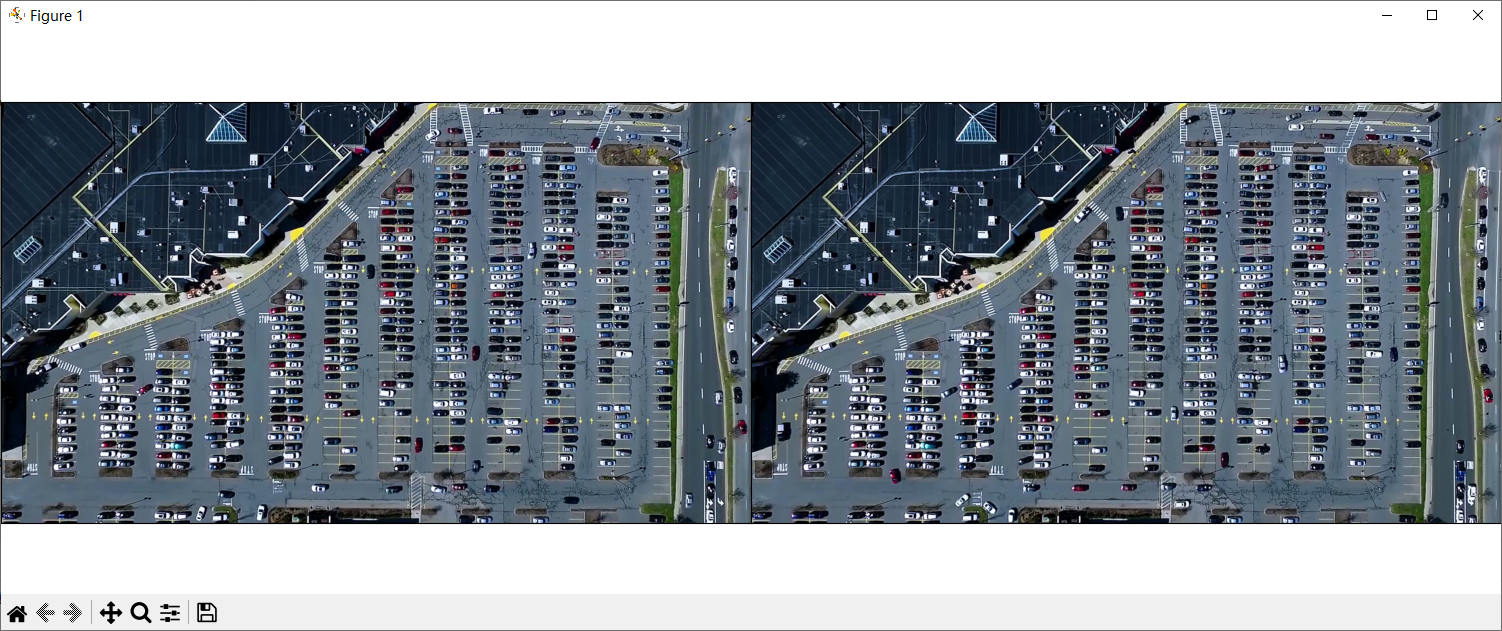
下面的两张图片是从一段停车场监控中截取的视频截图:
首先,我们来定义函数select_rgb_white_yellow,用于从函数中提取白色和黄色区域,并把处理后的图像进行返回。
设置颜色范围:lower 表示最低 RGB 值 120,120,120,upper 表示最高 RGB 值 255,255,255。
使用 cv2.inRange 创建一个白色掩码 white_mask,筛选出图像中在指定 RGB 范围内的像素。
调用 self.cv_show 显示白色掩码图像。
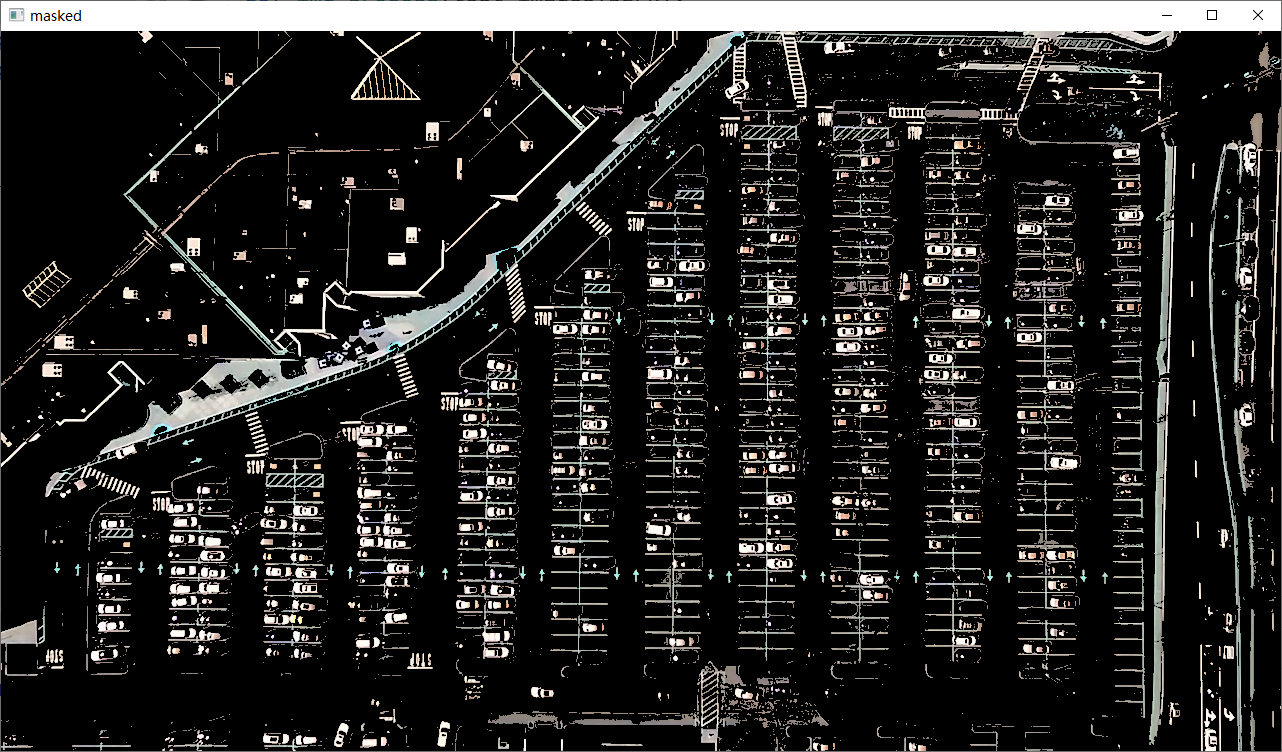
使用 cv2.bitwise_and 将原始图像与白色掩码结合,生成仅包含白色区域的图像 masked。
调用 self.cv_show 显示处理后的图像。
登录后复制
plain
def select_rgb_white_yellow(self,image):
lower = np.array([120,120,120])
upper = np.array([255,255,255])
white_mask = cv2.inRange(image,lower,upper)
self.cv_show('white_mask',white_mask)
masked = cv2.bitwise_and(image,image,mask=white_mask)
self.cv_show('masked',masked)
return masked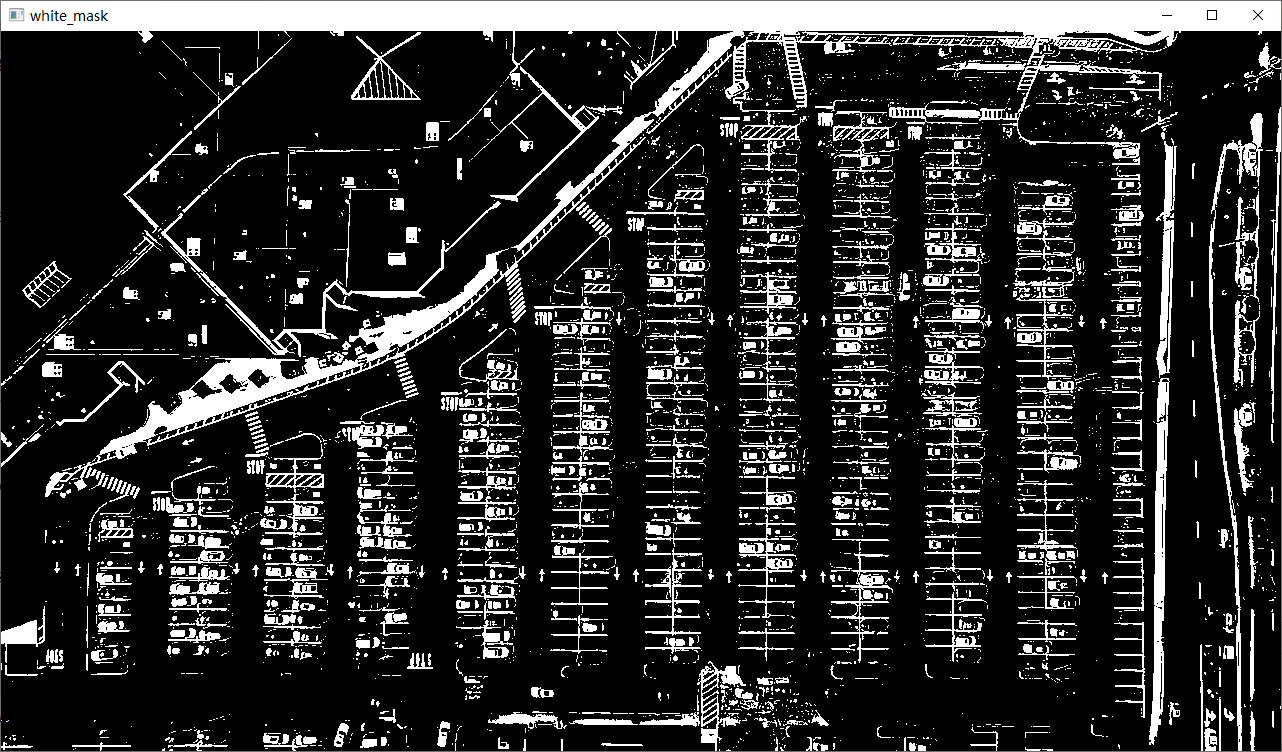
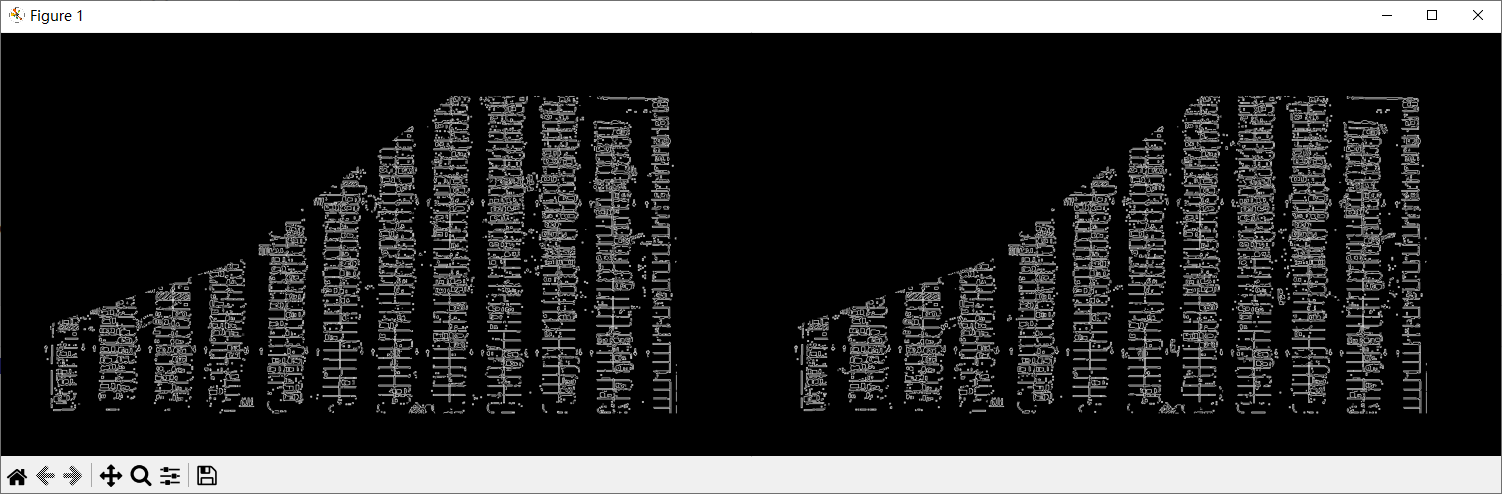
然后进行停车场图像的轮廓提取。
登录后复制
plain
def convert_gray_scale(self,image):
return cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
def detect_edges(self,image,low_threshold=50,high_threshold=200):
return cv2.Canny(image,low_threshold,high_threshold)通过以下方式调用:
登录后复制
plain
gray_images = list(map(park.convert_gray_scale,white_yellow_images))
park.show_img(gray_images)
edge_images = list(map(lambda image:park.detect_edges(image),gray_images))
park.show_img(edge_images)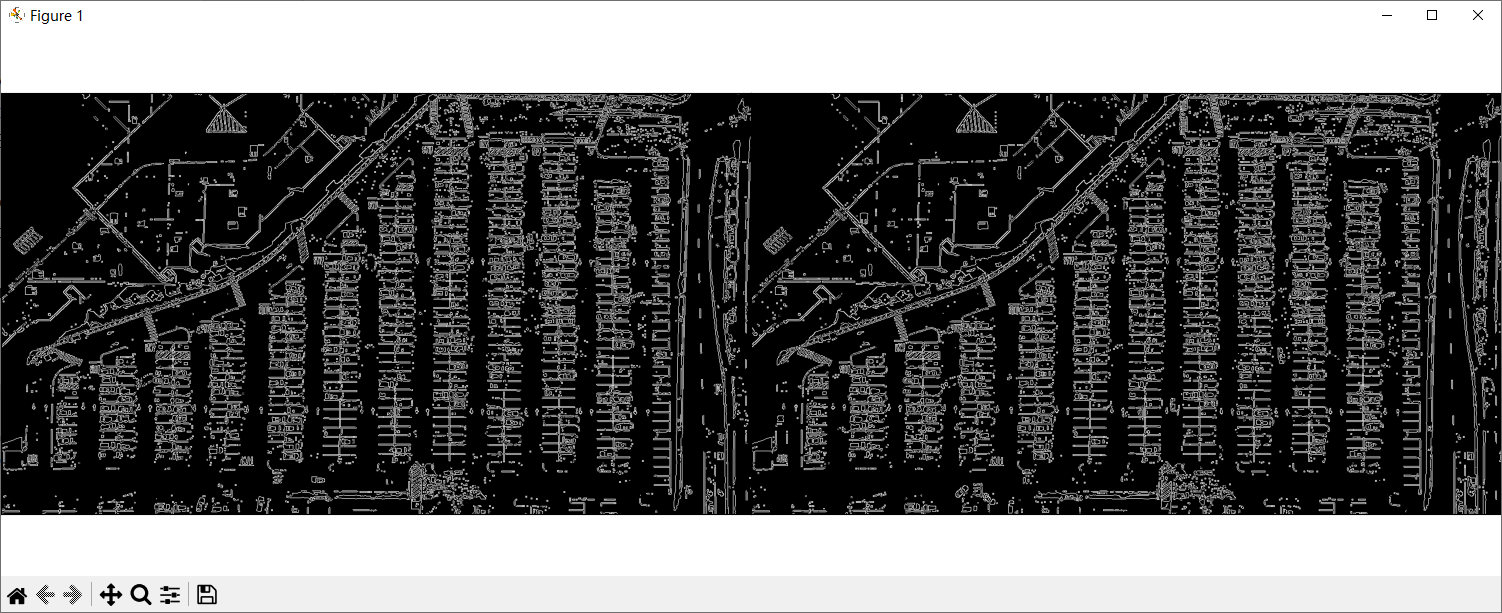
接下来,把关注重心放在停车场区域,无关紧要的范围进行删除。
大致标定停车场轮廓角点:
登录后复制
plain
def select_region(self, image):
# first, define the polygon by vertices
rows, cols = image.shape[:2]
pt_1 = [cols * 0.05, rows * 0.90]
pt_2 = [cols * 0.05, rows * 0.70]
pt_3 = [cols * 0.30, rows * 0.55]
pt_4 = [cols * 0.6, rows * 0.15]
pt_5 = [cols * 0.90, rows * 0.15]
pt_6 = [cols * 0.90, rows * 0.90]
vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]], dtype=np.int32)
point_img = image.copy()
point_img = cv2.cvtColor(point_img, cv2.COLOR_GRAY2RGB)
for point in vertices[0]:
cv2.circle(point_img, (point[0], point[1]), 10, (0, 0, 255), 4)
self.cv_show('point_img', point_img)
return self.filter_region(image, vertices)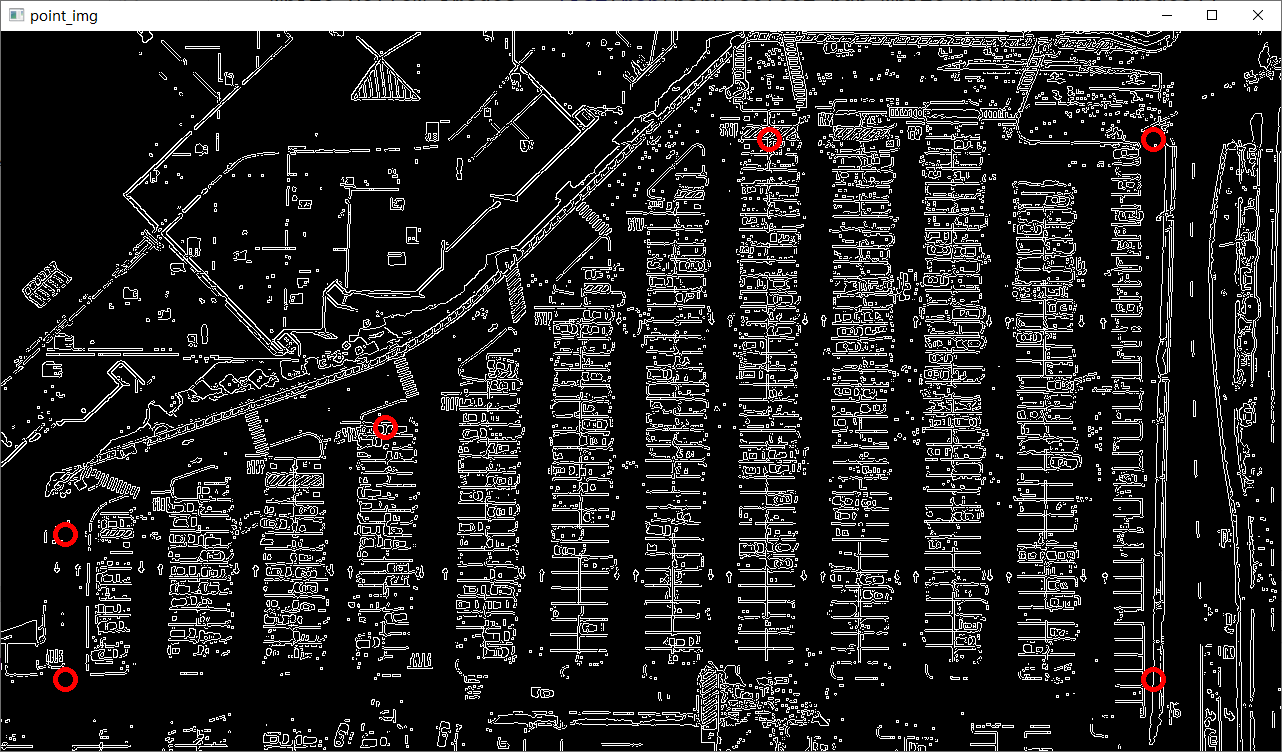
把无关区域剪除掉:
登录后复制
plain
def filter_region(self, image, vertices):
mask = np.zeros_like(image)
if len(mask.shape) ==2:
cv2.fillPoly(mask, vertices, 255)
self.cv_show('mask', mask)
return cv2.bitwise_and(image, mask)调用方法:
登录后复制
plain
roi_images = list(map(park.select_region,edge_images))
park.show_img(roi_images)调用结果: