目录
[1 固件升级的方式](#1 固件升级的方式)
[1.1 估计升级的模式](#1.1 估计升级的模式)
[1.2 固件升级方式](#1.2 固件升级方式)
[2 双区(2 Slot)DFU和单区(1 Slot)DFU](#2 双区(2 Slot)DFU和单区(1 Slot)DFU)
[2.1 双区DFU](#2.1 双区DFU)
[2.1.1 后台式DFU设升级方式](#2.1.1 后台式DFU设升级方式)
[2.1.2 非后台式DFU的升级方式](#2.1.2 非后台式DFU的升级方式)
[2.2 单区DFU](#2.2 单区DFU)
[2.3 两种模式的比较](#2.3 两种模式的比较)
[3 nRF Connect SDK中的Bootloader](#3 nRF Connect SDK中的Bootloader)
[3.1 Bootloader的作用](#3.1 Bootloader的作用)
[3.2 nRF Connect SDK支持Boot类型](#3.2 nRF Connect SDK支持Boot类型)
[3.3 SMP DFU协议](#3.3 SMP DFU协议)
[4 nodic 平台下MCU Boot 的Flash分配](#4 nodic 平台下MCU Boot 的Flash分配)
[5 Image structure](#5 Image structure)
概述
本文简要介绍了Zephyr OS架构下固件升级的一些内容,其中包括固件升级的模式,实现原理,nordic平台下固件升级的方法,image分配的方式等内容。
1 固件升级的方式
1.1 估计升级的模式
1) DFU模式
DFU(Device Firmware Update)的中文翻译设备固件升级。DFU的升级方式有很多,除了可以通过无线方式(OTA)进行升级,也可以通过有线方式进行升级,比如通过UART,USB或者SPI通信接口来升级设备固件。
2)OTA模式
OTA(Over The Air)是实现DFU的一种方式而已,准确说,OTA的全称应该是OTA DFU,即通过空中无线方式实现设备固件升级。只不过为了方便起见,直接用OTA来指代固件空中升级(有时候也将OTA称为FOTA,即Firmware OTA,这种称呼意思更明了一些)。只要是通过无线通信方式实现DFU的,都可以叫OTA,比如4G/WiFi/蓝牙/NFC/Zigbee/NB-IoT,都支持OTA。
1.2 固件升级方式
OTA方式还是有线通信方式,DFU包括后台式(background)和非后台式两种模式。
1) 后台式DFU
后台式DFU又称静默式DFU(Silent DFU),在升级的时候,新固件在后台悄悄下载,即新固件下载属于应用程序功能的一部分,在新固件下载过程中,应用可以正常使用,也就是说整个下载过程对用户来说是无感的,下载完成后,系统再跳到BootLoader程序,由BootLoader完成新老固件拷贝操作,至此整个升级过程结束。
2) 前台式DFU
前台式DFU,在升级的时候,系统需要先从应用程序跳到BootLoader程序,由BootLoader进行新固件下载工作,下载完成后BootLoader继续完成新老固件拷贝操作,至此升级结束。
2 双区(2 Slot)DFU和单区(1 Slot)DFU
双区或者单区DFU是新固件覆盖老固件的两种方式。
2.1 双区DFU
2.1.1 后台式DFU设升级方式
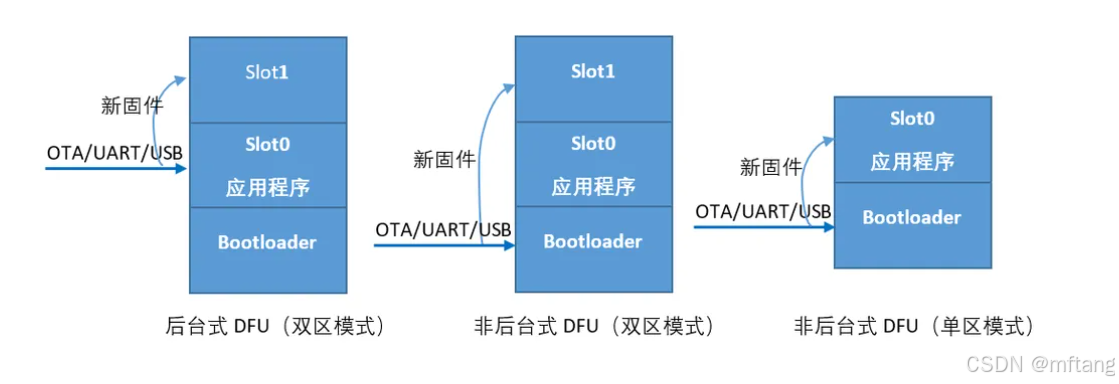
后台式DFU必须采用双区模式进行升级,即老系统(老固件)和新系统(新固件)各占一块Slot(存储区)。假设老固件放在Slot0中,新固件放在Slot1中,升级的时候,应用程序先把新固件下载到Slot1中,只有当新固件下载完成并校验成功后,系统才会跳入BootLoader程序,然后擦除老固件所在的Slot0区,并把新固件拷贝到Slot0中,或者把Slot0和Slot1两者的image进行交换。
2.1.2 非后台式DFU的升级方式
非后台式DFU可以采用双区也可以采用单区模式,与后台式DFU相似,双区模式下新老固件各占一块Slot(老固件为Slot0,新固件为Slot1),升级时,系统先跳入BootLoader程序,然后BootLoader程序把新固件下载到Slot1中,只有新固件下载完成并校验成功后,才会去擦除老固件所在的Slot0区,并把新固件拷贝到Slot0区。
2.2 单区DFU
单区模式的非后台式DFU只有一个Slot0,老固件和新固件分享这一个Slot0,升级的时候,进入bootloader程序DFU模式后立马擦除老固件,然后直接把新固件下载到同一个Slot中,下载完成后校验新固件的有效性,新固件有效升级完成,否则要求重来。
2.3 两种模式的比较
1) 单区模式的特点
跟非后台式DFU双区模式相比,单区模式节省了一个Slot的Flash空间,在系统资源比较紧张的时候,单区模式是一个不错的选择。不管是双区模式还是单区模式,升级过程出现问题后,都可以进行二次升级,都不会出现"变砖"情况。
2)双区模式的特点
双区模式的特点是,如果升级过程中出现问题或者新固件有问题,它还可以选择之前的老固件老系统继续执行而不受其影响。而单区模式碰到这种情况就只能一直待在bootloader中,然后等待二次或者多次升级尝试,此时设备的正常功能已无法使用。双区模式牺牲了很多存储空间,但是换来了更好的升级体验。
3 nRF Connect SDK中的Bootloader
3.1 Bootloader的作用
Bootloader在其中起到的作用包括:
1)判断正常启动还是DFU升级流程,
2)启动并校验应用image,
- 升级的时候完成新image和老image的交换或者拷贝工作。
3.2 nRF Connect SDK支持Boot类型
nRF Connect SDK支持MCUboot,B0和nRF5 Bootloader三种Bootloader,一般推荐使用MCUboot。MCUboot位于如下目录:
cpp
D:\ncs\v2.9.0\bootloader\mcuboot\boot\zephyr在nRF Connect SDK中的MCUboot功能强大,兼容的芯片平台多,而且是一个久经考验的第三方开源Bootloader。MCUboot把存储区划分:Primary slot 和Secondary slot ,而且primary slot跟secondary slot两者大小是一样的,程序默认在Primary slot中执行。
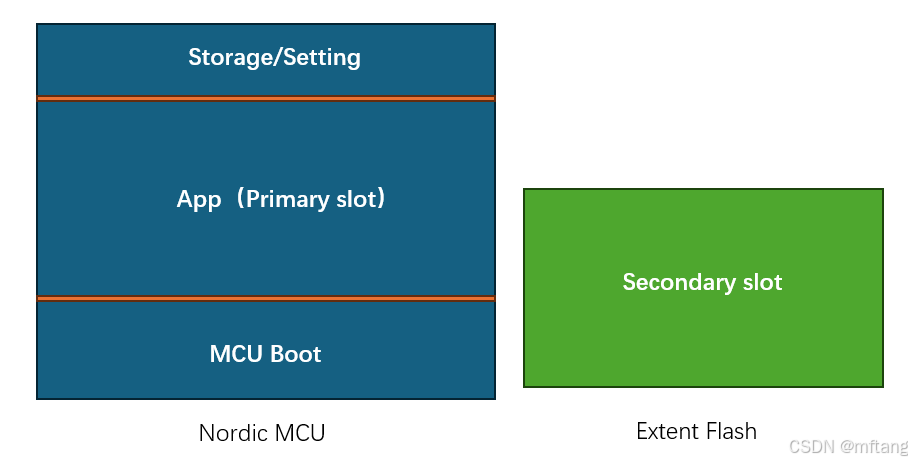
需要注意的是,nRF Connect SDK对MCUboot进行了定制,在nRF Connect SDK中,程序只能在Primary slot中执行,Secondary slot只是用来存储新image,而且Secondary slot可以放在内部Flash,也可以放在外部Flash。
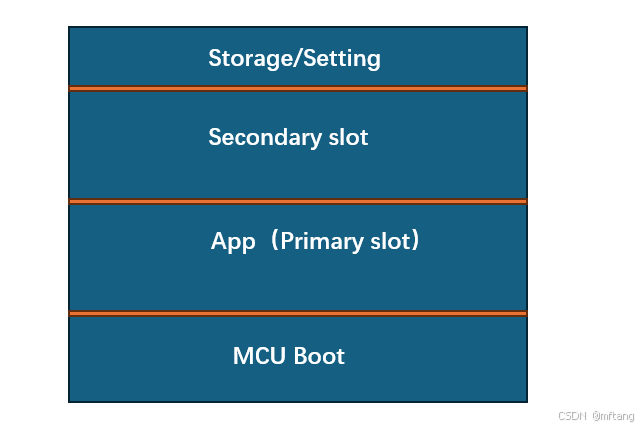
nRF Connect SDK中,存储器分区有如下两种典型情况:
1) MCU 内部Flash方式
2) MCU 内部Flash + Extent Flash方式
3.3 SMP DFU协议
smp 全称simple management protocol(简单管理协议),它是设备管理协议的一种,在nRF Connect SDK中,mcumgr模块实现了smp协议,或者说,smp协议按照mcumgr的要求对相应的传输数据进行编码,这样mcumgr里面注册的命令组(command group)可以直接对传输数据进行解析。
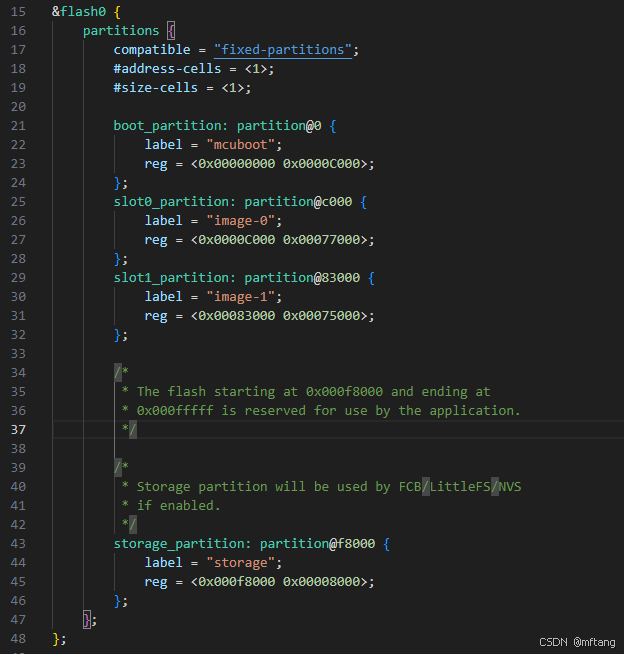
4 nodic 平台下MCU Boot 的Flash分配
笔者使用nRF52840芯片,其MCU的Flash的分配情况如下:
5 Image structure
bash
/**
* End-of-image slot structure.
*
* 0 1 2 3
* 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* ~ ~
* ~ Swap status (BOOT_MAX_IMG_SECTORS * min-write-size * 3) ~
* ~ ~
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | Encryption key 0 (16 octets) [*] |
* | |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | 0xff padding as needed |
* | (BOOT_MAX_ALIGN minus 16 octets from Encryption key 0) [*] |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | Encryption key 1 (16 octets) [*] |
* | |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | 0xff padding as needed |
* | (BOOT_MAX_ALIGN minus 16 octets from Encryption key 1) [*] |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | Swap size (4 octets) |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | 0xff padding as needed |
* | (BOOT_MAX_ALIGN minus 4 octets from Swap size) |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | Swap info | 0xff padding (BOOT_MAX_ALIGN minus 1 octet) |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | Copy done | 0xff padding (BOOT_MAX_ALIGN minus 1 octet) |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | Image OK | 0xff padding (BOOT_MAX_ALIGN minus 1 octet) |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | 0xff padding as needed |
* | (BOOT_MAX_ALIGN minus 16 octets from MAGIC) |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
* | MAGIC (16 octets) |
* | |
* +-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
*
* [*]: Only present if the encryption option is enabled
* (`MCUBOOT_ENC_IMAGES`).
*/