矿井设备通信破局:ModbusTCP转DeviceNet网关应用实践
在500米深的金属矿井中,传统人工操控采掘设备存在高风险、低效率问题。某矿业集团引入海希无线遥控器远程控制掘进机,却因通信协议冲突陷入困局:海希遥控器采用DeviceNet协议保障指令低延迟传输,而上位机监控系统基于ModbusTCP协议组网,两种协议设备无法直接通信,导致远程指令延迟超500ms,设备数据丢失率达20%,严重威胁安全生产。
ModbusTCP基于以太网,适合长距离大数据传输;DeviceNet采用CAN总线技术,侧重实时控制与抗干扰。两者数据帧格式、通信规则完全不同,直接连接会造成指令解析失败、数据错乱,而更换统一协议设备需高额成本与停产改造。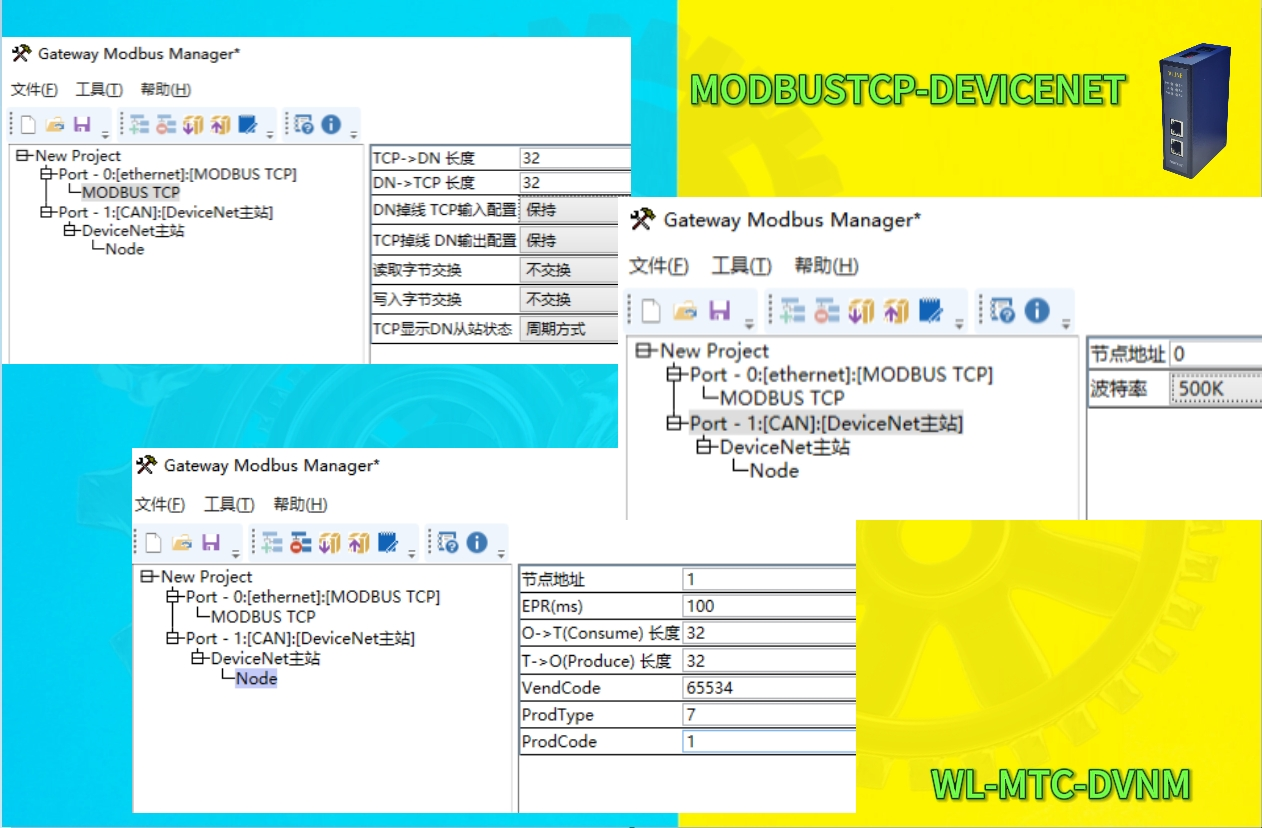
为此,工程团队引入稳联技术ModbusTCP转DeviceNet协议网关。该网关凭借双核心架构,将DeviceNet协议的掘进机控制指令(如前进、转向信号)解析转换为ModbusTCP数据包传输至上位机,同时把上位机下发的速度调节等指令反向解析回DeviceNet协议,实现双向互通。
实施时,先在ModbusTCP侧将网关接入工业以太网,通过软件解析接收器参数,配置IP地址并通过解析出来的参数对应填入,绑定遥控器指令与上位机寄存器;DeviceNet侧则用专用软件扫描节点,设置500kbps波特率建立连接,并启用数据缓冲机制抵御井下电磁干扰。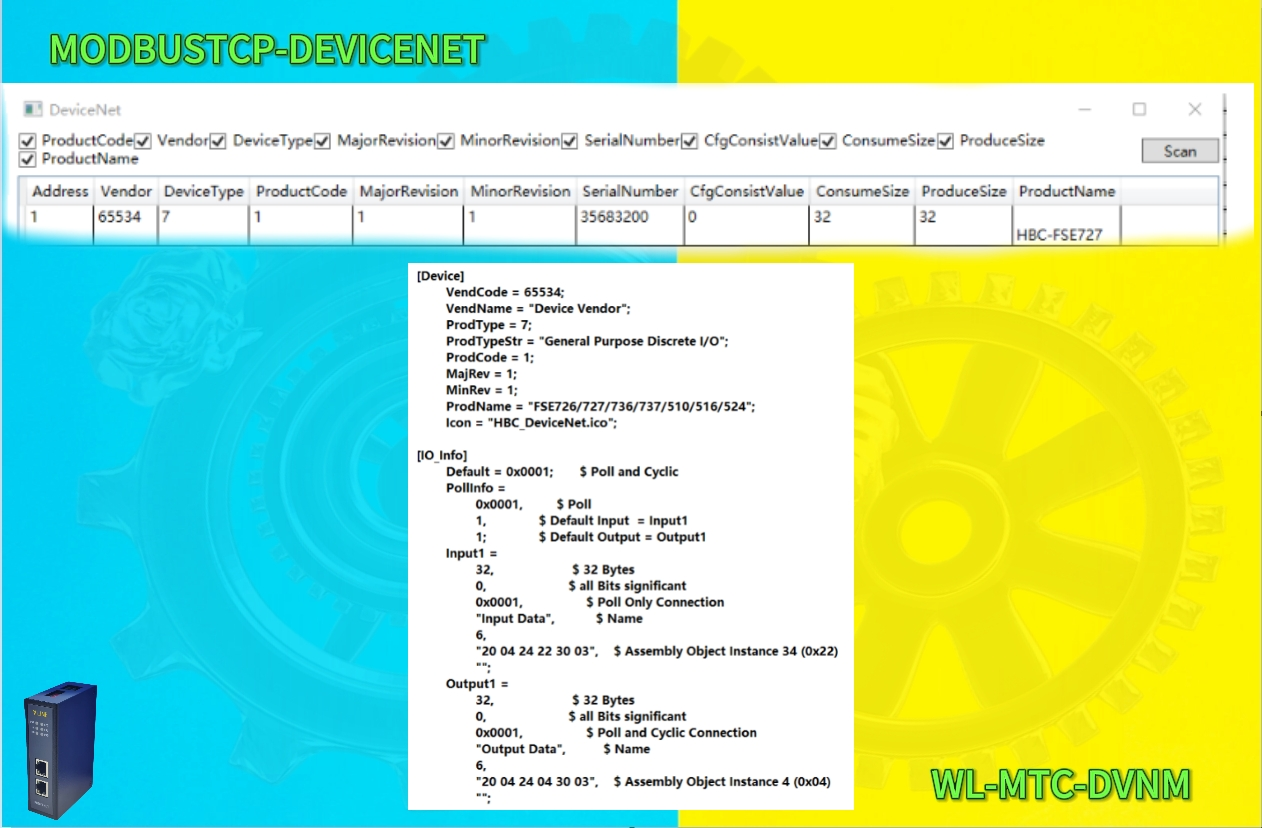
系统投用后,遥控指令延迟降至30ms内,数据零丢失。掘进机响应速度提升15倍,上位机故障预警准确率达80%,设备故障率大幅下降。维护人员通过网络远程诊断,单故障排查时间从2小时缩至20分钟。该案例证明,协议网关以低成本高效解决通信壁垒,为矿山自动化升级提供了可行方案。