程序示例精选
matlab+opencv车道线识别
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对《matlab+opencv车道线识别》编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
文章目录
一、所需工具软件
二、使用步骤
1. 主要代码
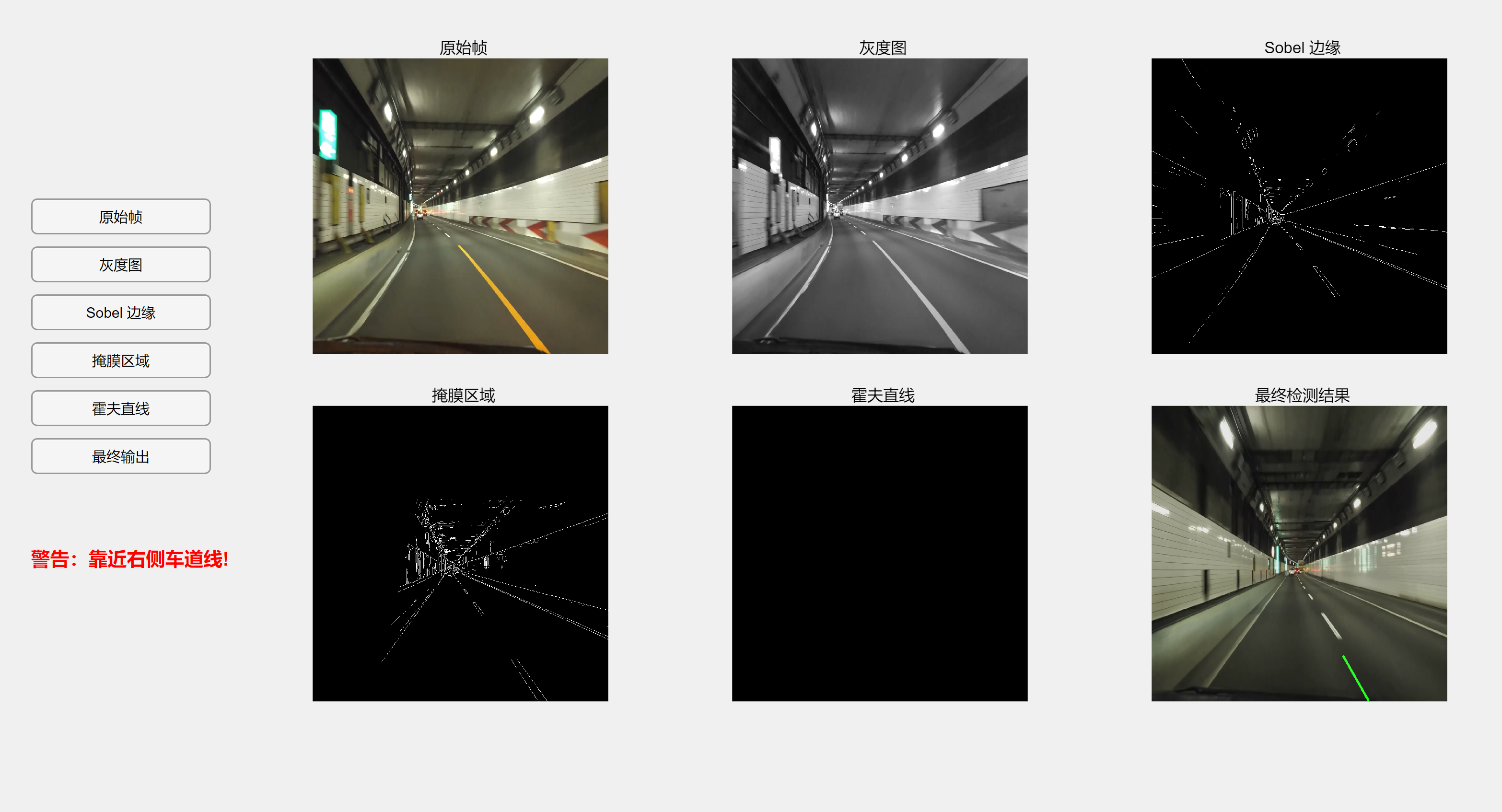
2. 运行结果
三、在线协助
一、所需工具软件
1. matlab
2. opencv
二、使用步骤
代码如下(示例):
cpp
function lane_detection_gui()
% 创建主窗体
fig = uifigure('Name', '多阶段车道线检测系统', ...
'Position', [left, bottom, winWidth, winHeight]);
% 全局变量存储视频路径和预警状态
global videoPath warningLabel;
videoPath = '';
% 创建预警标签(初始时隐藏)
warningLabel = uilabel(fig, ...
'Position', [50, 250, 200, 100], ... % 调整Y位置
'Text', '', ...
'FontSize', 16, ...
'FontColor', 'red', ...
'FontWeight', 'bold', ...
'Visible', 'off');
% 创建显示区域 (6个),调整Y坐标以适应更大的窗口
axOriginal = uiaxes(fig, 'Position', [250, 440, 300, 300], 'Box', 'on'); title(axOriginal, '原始帧');
axGray = uiaxes(fig, 'Position', [600, 440, 300, 300], 'Box', 'on'); title(axGray, '灰度图');
axSobel = uiaxes(fig, 'Position', [950, 440, 300, 300], 'Box', 'on'); title(axSobel, 'Sobel 边缘');
axMask = uiaxes(fig, 'Position', [250, 150, 300, 300], 'Box', 'on'); title(axMask, '掩膜区域');
axHough = uiaxes(fig, 'Position', [600, 150, 300, 300], 'Box', 'on'); title(axHough, '霍夫直线');
axOutput = uiaxes(fig, 'Position', [950, 150, 300, 300], 'Box', 'on'); title(axOutput, '最终检测结果');
% 每个按钮绑定一个处理函数,调整Y位置
uibutton(fig, 'Position', [50, 570, 150, 30], ...
'Text', '原始帧', ...
'ButtonPushedFcn', @(btn, event) processVideo(axOriginal, 'original', fig));
uibutton(fig, 'Position', [50, 530, 150, 30], ...
'Text', '灰度图', ...
'ButtonPushedFcn', @(btn, event) processVideo(axGray, 'gray', fig));
uibutton(fig, 'Position', [50, 490, 150, 30], ...
'Text', 'Sobel 边缘', ...
'ButtonPushedFcn', @(btn, event) processVideo(axSobel, 'sobel', fig));
uibutton(fig, 'Position', [50, 450, 150, 30], ...
'Text', '掩膜区域', ...
'ButtonPushedFcn', @(btn, event) processVideo(axMask, 'mask', fig));
uibutton(fig, 'Position', [50, 410, 150, 30], ...
'Text', '霍夫直线', ...
'ButtonPushedFcn', @(btn, event) processVideo(axHough, 'hough', fig));
% 只有"原始帧"按钮允许选择文件
if strcmp(type, 'original')
[file, path] = uigetfile({'*.mp4;*.avi', '视频文件'});
if isequal(file, 0)
return;
end
videoPath = fullfile(path, file);
end
if isempty(videoPath)
uialert(fig, '请先点击"原始帧"选择视频文件。', '未选择视频');
return;
end
% 读取视频
reader = VideoReader(videoPath);
while hasFrame(reader)
frame = readFrame(reader);
frame = imresize(frame, [980,980]); % 将每帧缩放到 640x480
result = frame;
% 获取图像中心位置(假设车辆在图像中心)
[rows, cols, ~] = size(frame);
centerX = cols / 2;
centerY = rows * 0.8; % 假设车辆位置在图像下方80%处
% 重置警告状态
warningLabel.Visible = 'off';
switch type
case 'original'
result = frame;
case 'gray'
result = rgb2gray(frame);
case 'sobel'
gray = rgb2gray(frame);
thresh = 0.10;
result = edge(gray, 'Sobel', thresh);
case 'mask'
gray = rgb2gray(frame);
sobel = edge(gray, 'Sobel');
result = doSegment(sobel);
case 'hough'
gray = rgb2gray(frame);
sobel = edge(gray, 'Sobel');
mask = doSegment(sobel);
lines = houghLines(mask);
avgLines = calculateLines(frame, lines);
result = visualizeLines(frame, avgLines);
% 检查是否接近车道线
checkLaneProximity(avgLines, centerX, centerY, cols);
case 'output'
gray = rgb2gray(frame);
sobel = edge(gray, 'Sobel');
mask = doSegment(sobel);
lines = houghLines(mask);
avgLines = calculateLines(frame, lines);
houghImg = visualizeLines(frame, avgLines);
result = imadd(im2double(frame) * 0.9, im2double(houghImg));
% 检查是否接近车道线
checkLaneProximity(avgLines, centerX, centerY, cols);
end
imshow(result, 'Parent', ax);
pause(0.03); % 控制播放速度
end
end
%% 检查是否接近车道线
function checkLaneProximity(avgLines, centerX, centerY, imgWidth)
global warningLabel;
% 定义安全距离(像素)
safetyDistance = imgWidth * 0.15; % 图像宽度的15%
% 检查每条车道线
for i = 1:size(avgLines, 1)
if ~isempty(avgLines(i,:))
x1 = avgLines(i,1); y1 = avgLines(i,2);
x2 = avgLines(i,3); y2 = avgLines(i,4);
% 计算车道线在车辆位置(y坐标)处的x值
if y1 ~= y2 % 避免除以零
slope = (x2 - x1) / (y2 - y1);
laneX = x1 + (centerY - y1) * slope;
% 计算与车道线的距离
distance = abs(centerX - laneX);
% 如果距离小于安全距离,显示警告
if distance < safetyDistance
if laneX < centerX
warningText = '警告:靠近左侧车道线!';
else
warningText = '警告:靠近右侧车道线!';
end
warningLabel.Text = warningText;
warningLabel.Visible = 'on';
break; % 只要接近一条线就显示警告
end
end
end
end
end
%% 掩膜函数
function segment = doSegment(frame)
[rows, cols] = size(frame);
mask = false(rows, cols);
vertices = [200, rows; % 左下角
1700, rows; % 右下角
1550, 300; % 右上角
350, 300]; % 左上角
mask = poly2mask(vertices(:,1), vertices(:,2), rows, cols);
segment = frame & mask;
end运行结果
三、在线协助:
如需安装运行环境或远程调试,见文章底部个人 QQ 名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Visual Studio, Qt, C++, Python编程语言入门指导
3)界面美化
4)软件制作
5)云服务器申请
6)网站制作
当前文章连接: https://blog.csdn.net/alicema1111/article/details/132666851
个人博客主页 :https://blog.csdn.net/alicema1111?type=blog
博主所有文章点这里: https://blog.csdn.net/alicema1111?type=blog
博主推荐:
Python人脸识别考勤打卡系统:
https://blog.csdn.net/alicema1111/article/details/133434445
Python果树水果识别 :https://blog.csdn.net/alicema1111/article/details/130862842
Python+Yolov8+Deepsort入口人流量统计: https://blog.csdn.net/alicema1111/article/details/130454430
Python+Qt人脸识别门禁管理系统: https://blog.csdn.net/alicema1111/article/details/130353433
Python+Qt指纹录入识别考勤系统: https://blog.csdn.net/alicema1111/article/details/129338432
Python Yolov5火焰烟雾识别源码分享: https://blog.csdn.net/alicema1111/article/details/128420453
Python+Yolov8路面桥梁墙体裂缝识别: https://blog.csdn.net/alicema1111/article/details/133434445
Python+Yolov5道路障碍物识别: https://blog.csdn.net/alicema1111/article/details/129589741
Python+Yolov5跌倒检测 摔倒检测 人物目标行为 人体特征识别: https://blog.csdn.net/alicema1111/article/details/129272048