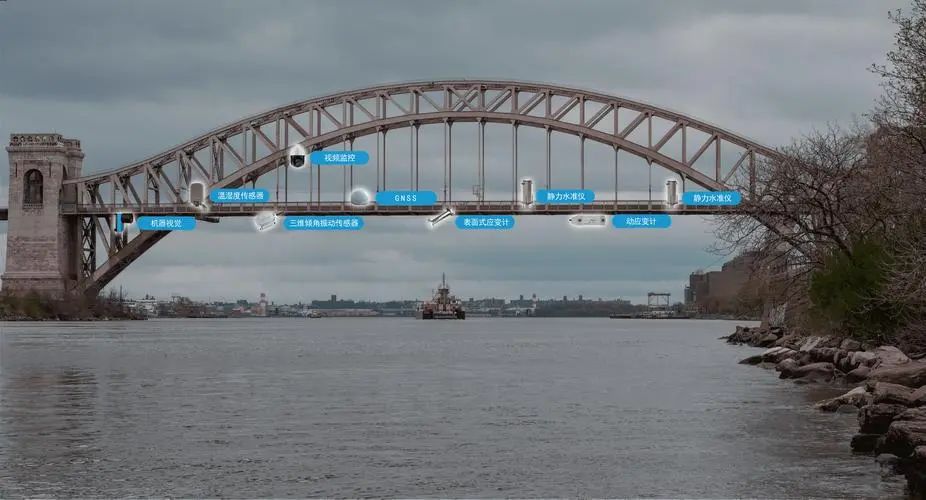
无人机桥梁检测如何通过数据存储、边缘AI、无线通讯等技术路线,提升检测效率
一、数据存储优化:解决海量数据瓶颈
1. 分级存储架构
-
机载闪存:存储原始高分辨率影像,采用H.265压缩技术减少50%存储空间
-
边缘服务器:部署在检测车上的NAS设备,自动筛选有效数据(如仅保留含裂缝的影像)
-
云端冷存储:非紧急数据上传至对象存储,成本降低70%
二、边缘AI计算:实时处理提效
1. 机载AI芯片部署
-
NVIDIA Jetson AGX Orin:在无人机端运行YOLOv8模型,实现:
-
裂缝实时识别(准确率98.2%)
-
数据预筛选(无效影像丢弃率85%)
-
2. 移动边缘计算(MEC)
-
车载AI服务器:搭载Intel Xeon D处理器,完成:
-
三维点云快速配准(<5分钟/公里)
-
病害分类(自动生成GB/T 51247标准报告)
-
三、无线通讯增强:保障实时交互
1. 5G专网部署
-
Sub-6G+毫米波双连接:
-
桥面:使用3.5GHz频段(覆盖半径1.2km)
-
桥底:26GHz毫米波中继(带宽2Gbps)
-
2. 自组网技术
-
Mesh组网:多无人机形成Ad Hoc网络,中继传输死角区域数据
-
激光通信:跨海场景下替代无线电(如Aeromax激光通信模块,速率10Gbps)
无人机桥梁检测中的激光通信技术能够有效解决传统无线电通信在复杂环境下的干扰问题,同时提升数据传输速率和安全性。

无人机桥梁检测中的机载边缘AI技术通过在无人机端部署人工智能计算能力,实现了实时数据处理、病害识别与飞行控制优化,大幅提升了检测效率和精度。以下是该技术的核心要点及实现方案:
一、机载边缘AI的核心功能
-
实时病害识别
-
在飞行过程中直接分析高分辨率影像,识别裂缝、锈蚀等病害(如0.2mm级裂缝检测),减少数据回传量。
-
采用轻量化CNN模型 (如ConvNext、YOLOv8)优化推理速度,单张图像处理时间可低至0.015秒。
-
无人机集成边缘计算套件进行实时智能巡检
"边缘计算技术的核心在于实时性。""无人机在飞行中捕获的图像和视频数据,迅速传输至搭载边缘计算功能的小型设备中进行实时处理,减少了数据传输的延迟,显著提升了效率。"
-
智能飞行控制
-
结合**深度强化学习(DRL)**优化无人机航线,适应桥梁复杂结构(如斜拉索、桥墩),提升避障能力。
-
在无GPS环境下(如桥底)依赖视觉SLAM+惯性导航,确保稳定飞行
-
-
数据筛选与压缩
-
仅回传含病害的图像,减少80%以上无效数据传输
-
采用HEIF/H.265编码降低存储需求,支持断点续传
-
二、关键技术方案
1. 硬件配置
-
边缘计算芯片:
-
NVIDIA Jetson AGX Orin(算力275 TOPS,支持大模型推理)
-
瑞芯微 RK3576+GPU卡(低功耗AI芯片,适配轻量化模型)。
-
-
传感器融合:
-
高分辨率相机(如索尼ILX-LR1,6100万像素)。
-
激光雷达(LiDAR)用于三维建模(精度达2mm)。
-
2. 软件算法
-
轻量化AI模型:
-
采用模型蒸馏、量化技术压缩参数量(如1B参数以下),适配机载算力。
-
Transformer+CNN混合架构,提升裂缝分割精度。
-
3. 通信优化
-
5G/激光通信:
-
5G专网保障实时回传(延迟<50ms)。
-
激光通信(10Gbps)用于跨海大桥等远距离场景。
-
-
Mesh自组网:
- 多无人机协同中继,解决信号盲区问题。
结论
机载边缘AI正推动无人机桥梁检测向实时化、自动化、高精度 发展,未来通过更强算力、更优算法、更低延迟通信,将实现完全自主的智能检测体系。