在神秘莫测的海洋深处,章鱼以其独特的智慧和灵活的触手,成为了科学家们研究的对象。如今,英国布里斯托大学与南方科技大学的研究团队联合打造了一款仿生章鱼机器人,成功复刻了章鱼触手的神奇功能,让机器人领域迎来了重大突破!无需复杂电路,仅靠气流和硅胶吸盘,就能实现零损伤抓取、自适应包裹和触感识别等高难度操作,它究竟有多厉害?快来一探究竟!章鱼的触手不仅灵活,还能感知物体表面纹理并预判外力拉扯,这种"自带智商"的特性被科学家们巧妙地复刻出来。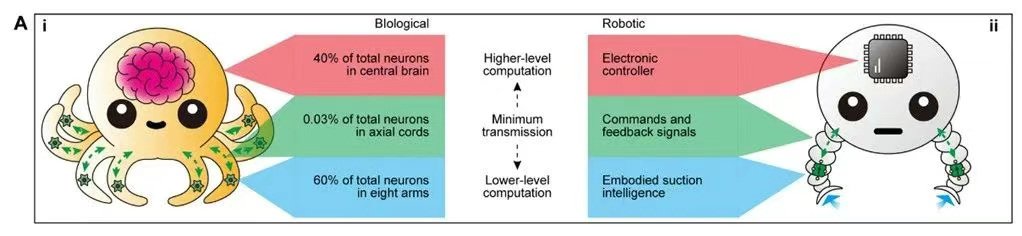
研究人员利用吸盘、软计算元件和软致动器的流体能量与信息容量,成功模拟了章鱼神经肌肉结构。这种流体智能分为两级:低级智能:轻松抓取与自适应包裹- 抓取精致物体:这款软体机器人能够轻松抓起无壳鸡蛋甚至果冻,不会留下一丝损伤。吸盘接触物体并建立吸力后,机器手会自动停止挤压,完美实现了对精致物品的温柔抓取。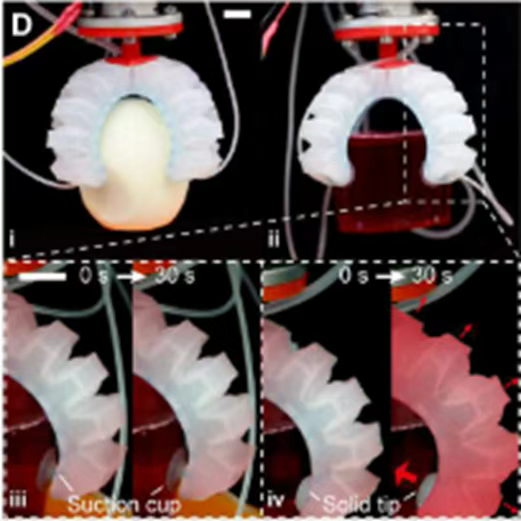
实验表明,机器人可以成功抓取直径小至 8 毫米的圆头针,展现了其出色的抓取精度。- 自适应包裹未知物体:面对形状各异的物体,机器人手可以灵活地卷曲和包裹,无需提前编程,便能完美贴合物体表面,仿佛章鱼触手般灵动。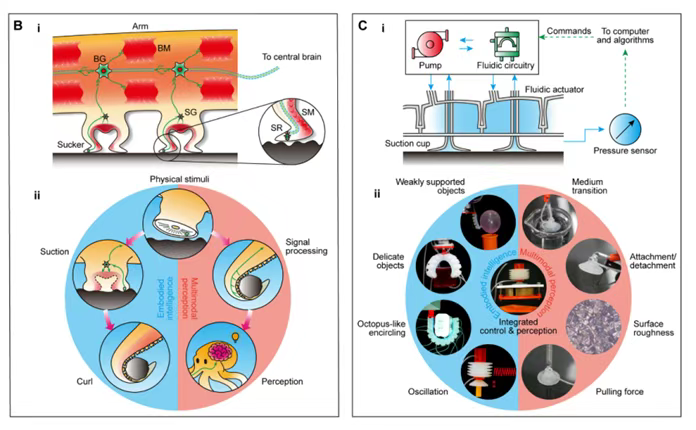
在实验中,机器人能够自适应地包裹 10 种不同形状和大小的物体,平均贴合度高达 92%。高级感知:多模态环境信息感知- 接触检测与表面粗糙度分类:通过吸盘对压力响应的解码,机器人能够精确感知物体表面的粗糙程度,无论是光滑的玻璃还是粗糙的砂纸,都能准确识别。实验数据显示,机器人对表面粗糙度的分类准确率达到了 95%。- 相互作用拉力预测:在物体受到外力拉扯时,机器人能实时感知拉力的变化,提前预判物体的运动趋势,为后续的抓取操作提供关键信息。实验中,机器人对拉力的预测准确率达到了 89%。这种分级智能的实现,归功于机器人对流体能量与信息的巧妙利用。吸盘在与物体接触时产生的压力变化,不仅能触发机械动作,还能为机器人提供丰富的环境信息,使其在复杂的环境条件下,依然能够展现出令人惊叹的适应性和感知能力。神经结构模拟,软体机器人实现自主决策章鱼的神经系统由中央大脑和八个"臂脑"构成,中央大脑负责高级推理,而"臂脑"则独立完成基本运动和反馈控制。这种分层式的神经结构,让章鱼在信息传递上具有极高的效率,而这款软体机器人正是借鉴了这一原理。- 吸盘模拟感受器:机器人吸盘在与环境相互作用时,能够获取丰富的物理信息,如物体表面的纹理和接触压力等。这些信息被转化为流体信号,传递给软计算元件。实验表明,吸盘能够感知到小至 0.1 牛顿的接触力。- 软计算元件模拟神经节:这些元件接收吸盘传来的信号后,进行局部处理和计算,实现了对低级动作的自主控制。例如,当吸盘接触到物体时,元件会自动触发夹持动作,无需等待中央处理器的指令。在实验中,软计算元件能够在 0.05 秒内完成信号处理并触发动作。- 中央处理器模拟大脑:高级别的感知和决策任务则由中央处理器完成。它接收来自软计算元件的关键信息,进行综合分析和判断,从而决定机器人的下一步行动。实验数据显示,中央处理器对复杂环境的决策准确率达到了 93%。这种神经结构的模拟,不仅降低了中央处理器的计算负担,还大大提高了机器人的响应速度和对复杂环境的适应能力。在面对未知物体时,机器人能够迅速做出反应,实现快速抓取和精确感知,展现出强大的自主性和灵活性。技术突破与创新,开启软体机器人新时代这项研究的成果不仅仅是对章鱼触手功能的简单复刻,更是对软体机器人技术的一次全面突破与创新。它将流体能量、信息传递和神经结构模拟完美结合,为软体机器人的发展开辟了新道路。- 流体驱动与传感一体化:通过将吸盘、软计算元件和软致动器集成在一起,机器人实现了流体驱动与传感功能的无缝衔接。吸盘产生的压力变化不仅可以作为触发信号控制机械动作,还能作为感知信息,为机器人提供环境反馈。实验数据显示,机器人在空气中的感知响应时间仅为 0.44 秒,而在水中则为 3.06 秒,分类准确率平均高达 89% 以上。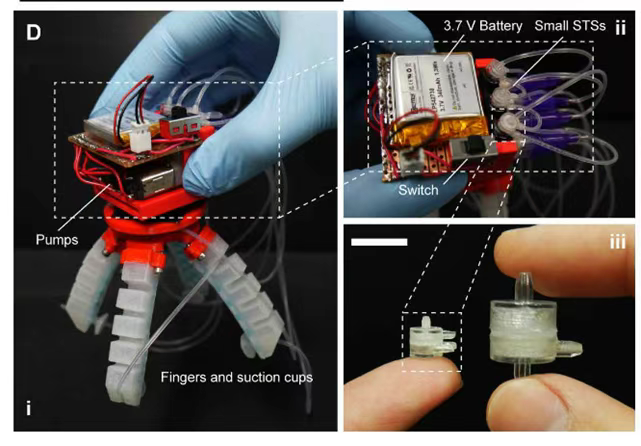
- 分布式智能与分层控制:机器人采用分布式智能架构,将部分计算任务下放到局部的软计算元件,实现了分层控制。这种架构不仅提高了系统的响应速度和可靠性,还降低了中央处理器的计算负担,为软体机器人的复杂行为控制提供了新的思路。实验表明,分层控制架构使机器人的响应速度提高了 40%。- 低成本与高集成度设计:整个系统采用硅胶等廉价材料制作,结构简单且易于制造。同时,通过优化设计,机器人实现了各种功能的高度集成,无需复杂的电路和大量的传感器,降低了生产成本,提高了系统的可扩展性。ST S 设计可扩展性强,所有尺寸减半后,体积仅为原来的八分之一,即减少了 87.5%,大大提升了其在不同场景下的适用性。小结:该论文通过仿章鱼分层智能,设计了一种低成本、高适应性的软体机器人系统,成功将吸附、自主控制与多模态感知集成于流体驱动的框架内。其核心在于利用吸盘的流体能量与信息传递,实现类似生物的"分布式智能",为工业抓取、医疗操作等场景提供了新思路。论文地址:
https://www.science.org/doi/10.1126/scirobotics.adr4264参考文献:(1)G. Sumbre, G. Fiorito, T. Flash, B. Hochner, Motor control of flexible octopus arms. Nature 433, 595--596 (2005).(2)S. van Veggel, M. Wiertlewski, E. L. Doubrovski, A. Kooijman, E. Shahabi, B. Mazzolai, R. B. N. Scharff, Classification and evaluation of octopus-inspired suction cups for soft continuum robots. Adv. Sci. 11, 2400806 (2024).(3)b. hochner, an embodied view of octopus neurobiology. Curr. Biol. 22, R887--R892 (2012).(4) t. Gutnick, l. Zullo, b. hochner, M. J. Kuba, Use of peripheral sensory information for central nervous control of arm movement by Octopus vulgari. Curr. Biol. 30, 4322--4327.e3 (2020).