1,将电脑网卡设置自动获取,用网线将电脑与库卡机器人控制柜上的网口连接
2,打开软件后,会出现项目打开对话框,点击浏览按钮,会出现机器人站项目
3,点击项目前面的➕,展开菜单,选择对应的版本后,点击对话框右下角的打开按钮
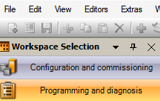
4,点击软件左侧的项目与诊断,然后选择右侧的cells tree下面的项目,然后点击这个按钮
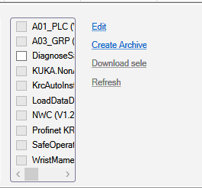
5,在软件中间会出现机器人状态显示界面,点击创建备份按钮,选择存储路径后,点击开始
6,等待一段时间备份完成,备份文件在选择的路径文件夹内。

1,将电脑网卡设置自动获取,用网线将电脑与库卡机器人控制柜上的网口连接
2,打开软件后,会出现项目打开对话框,点击浏览按钮,会出现机器人站项目
3,点击项目前面的➕,展开菜单,选择对应的版本后,点击对话框右下角的打开按钮
4,点击软件左侧的项目与诊断,然后选择右侧的cells tree下面的项目,然后点击这个按钮
5,在软件中间会出现机器人状态显示界面,点击创建备份按钮,选择存储路径后,点击开始
6,等待一段时间备份完成,备份文件在选择的路径文件夹内。