第1章 配置IPC底层代码
使用IPC的动机:
我计划我的项目中要使用RS485,CANFD通信和EtherCAT通信,由于通信种类较多,而对于电机控制来说大部分数据都是重复的,并且有些数据可以很久才改变一次,所以我计划使用CPU2做FOC算法控制电机,使用CPU1与上位机进行通信,使用IPC做电机参数之间的通信。
实现目的:
CPU1与CPU2之间可以相互发送数据,数据支持浮点数。通信速度尽可能快和稳定。
下面的代码只有几百行,但是网上资料较少,问了TI工程师也没有答复,整了两三天才整出来,制作不易,希望点赞收藏加个关注,后期会不定时更新单片机的学习笔记。
1.1 CPU1的sysconfig配置
我的CPU1主要是用来做通信的,其实做通信最好是使用CM核,因为他是cortex-M内核,对信息的接收比较好,但是由于网上对这个核的资料很少,并且不能使用sysconfig进行配置,开发速度比较慢,综合起来就使用了CPU1做通信,CPU2做其他外设的控制代码,去跑算法。我的想法是使用CPU1能够主动发送和读取CPU2的数据,CPU2是跑算法和其他外设控制的,所以CPU1的IPC不需要被CPU2的中断,CPU2的数据应能够被CPU1中断。但是看很多解释以及芯片手册,貌似必须要有IPC中断才能接收数据,这点现在依然有疑问。知道的伙伴还望解答。
CPU1的sysconfig配置为:
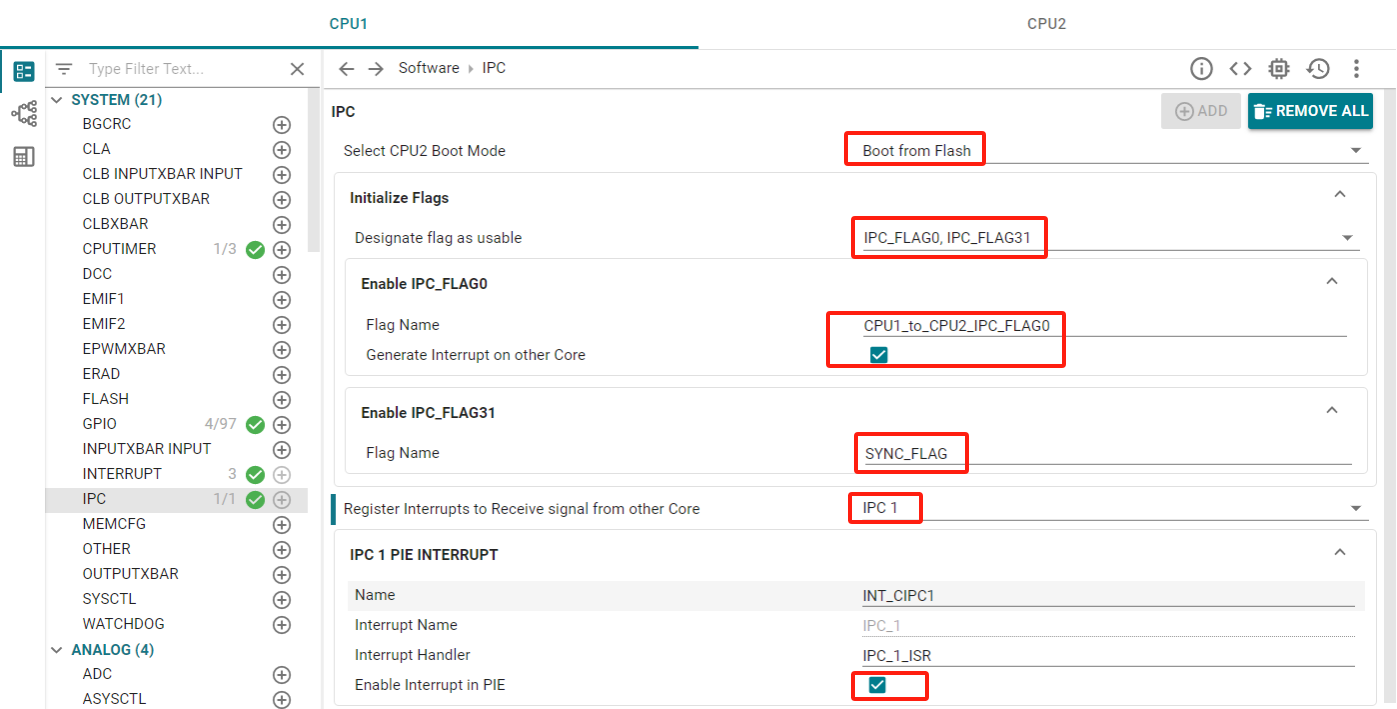
第一行配置为选择CPU2的boot Mode即启动模式,Sysconfig对其的解释为在FLASH启动,配置完成后仍然需要在CPU1主函数中调用
Device_bootCPU2(BOOT_MODE_CPU2);函数来使能CPU2.
第二行配置为选择IPC的FLAG,CPU的IPC一共有32个标志,这里使用了IPC_FLAG0用作通信触发CPU2的中断,使用IPC_FLAG31来作为标志来同步两个CPU时钟。
第三行配置为选择能使CPU1的IPC_FLAG0,必须要勾选下面的对号,用来触发CPU2的接收中断。
第四行配置为使能IPC_FLAG31来作为标志来同步两个CPU时钟。可以选测0~31任一。
第五行配置为CPU1接收CPU2的IPC触发中断,IPC的中断有IPC0-3四个,这里选择了IPC1,也可使用IPC0,IPC1,IPC2,IPC3。
第六行配置为使能PIE里对应的中断。
1.2 CPU2的sysconfig配置
CPU2的sysconfig配置为
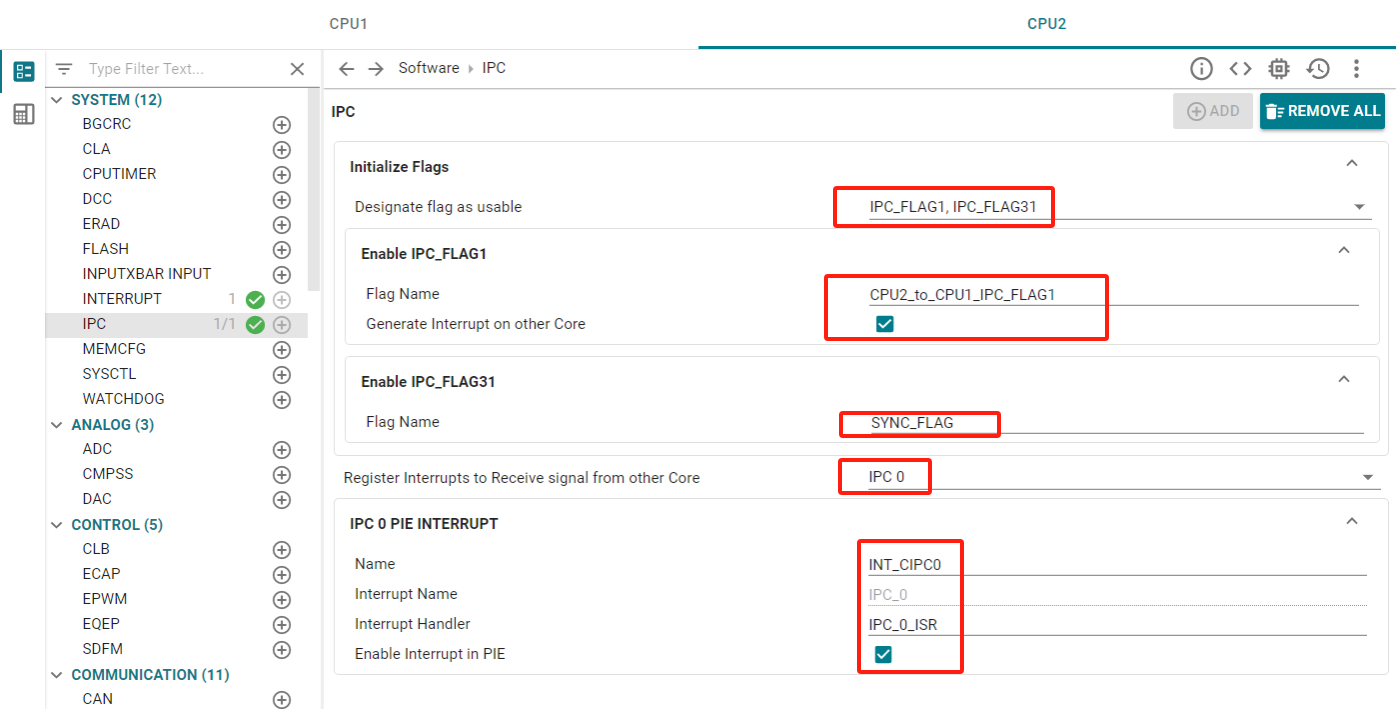
第一行配置为使用了IPC_FLAG1,IPC_FLAG31。
第二行配置为使能IPC_FLAG1,用于配置触发CPU1接收IPC中断的FLAG。
第三行配置为使能IPC_FLAG31,用于同步CPU核的时钟,可用其他FLAG,但要与CPU1的对应。
第四行配置为打开CPU2的IPC0中断,用于触发接收CPU1通过IPC_FLAG0发送的数据的中断
第五行为开启IPC0中断函数
第2章 IPC的应用层代码
2.1 CPU1的主函数IPC代码
第一步:根据1.1的介绍,需要先执行开启CPU2的代码,即:
Device_bootCPU2(BOOT_MODE_CPU2);第二步:清除IPC标志位,通过IPC_FLAG31同步两个CPU时钟,代码如下
IPC_clearFlagLtoR(IPC_CPU1_L_CPU2_R, IPC_FLAG_ALL);//清除IPC的所有标志位
IPC_sync(IPC_CPU1_L_CPU2_R, IPC_FLAG31);//通过IPC_FLAG31同步两个CPU时钟第一行解释为:清除CPU1与CPU2通信的IPC的所有FLAG。
第二行解释为:同步CPU时钟代码。
第三步:设置要发送的信息,代码为下:
#pragma DATA_SECTION(readData,"MSGRAM_CPU1_TO_CPU2")
float readData[10];
int i,j;
for(i=0; i<10; i++)
{
j++;
readData[i] = i + j*0.5f;
}第一行解释为:是 TI 编译器的一条 编译指令(pragma 指令) ,用于将变量 readData 放入指定的内存段 "MSGRAM_CPU1_TO_CPU2" 中,而不是默认的数据段(如 .data、.bss)
地址在:
MEMORY
{
CPU1TOCPU2RAM : origin = 0x03A000, length = 0x000800
CPU2TOCPU1RAM : origin = 0x03B000, length = 0x000800
}
SECTIONS
{
MSGRAM_CPU1_TO_CPU2 : > CPU1TOCPU2RAM, type=NOINIT
MSGRAM_CPU2_TO_CPU1 : > CPU2TOCPU1RAM, type=NOINIT
}第二行解释位:定义数据类型,定义为了一个数组。
第三,四,五行解释为:对数据进行初始化。
第四步:发送数据
while(1)
{
DEVICE_DELAY_US(5000000);
IPC_sendCommand(IPC_CPU1_L_CPU2_R, IPC_FLAG0, IPC_ADDR_CORRECTION_ENABLE,
IPC_CMD_READ_MEM, (uint32_t)readData, 10);
for(i=0; i<10; i++)
{
j++;
readData[i] = i + j*0.5f;
}
}延迟是为了防止数据发送较快,看不出效果,IPC_sendCommand函数中为要发送的数据,数据使用了地址修正功能,
为对数据发送没有影响,可以理解为对数据的功能进行标定,方便对数据进行存储,处理。
CPU1主函数总代码为:
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "IPC.h"
#include "stdio.h"
#include "Interrupt.h"
#include "string.h"
#include "Modbus.h"
#pragma DATA_SECTION(readData,"MSGRAM_CPU1_TO_CPU2")
float readData[10];
int i,j;
void main(void)
{
Device_init();//初始化所有时钟以及外设
Interrupt_initModule();//初始化PIE,清除所有PIE寄存器,失能CPU中断
Interrupt_initVectorTable();//初始化PIE向量表
Board_init();//初始化来自SysConfig的配置
Device_bootCPU2(BOOT_MODE_CPU2);//启动CPU2核心部分
TX_EN;//RS485发送信息使能
IPC_clearFlagLtoR(IPC_CPU1_L_CPU2_R, IPC_FLAG_ALL);//清除IPC的所有标志位
IPC_sync(IPC_CPU1_L_CPU2_R, IPC_FLAG31);//通过IPC_FLAG31同步两个CPU时钟
EINT;//使能全部中断
ERTM;//使能允许调试
setvbuf(stdout, NULL, _IONBF, 0);//防止发送堵塞
while(1)
{
DEVICE_DELAY_US(5000000);
IPC_sendCommand(IPC_CPU1_L_CPU2_R, IPC_FLAG0, IPC_ADDR_CORRECTION_ENABLE,
IPC_CMD_READ_MEM, (uint32_t)readData, 10);
for(i=0; i<10; i++)
{
j++;
readData[i] = i + j*0.5f;
}
}
}我是接着我上个文章的代码写的,使用这个主要是为了好测试,若有不懂的代码可以观看我的另一篇博客:TMS320F28388使用sysconfig配置SCI通信(RS485+FIFO+Modbus)
2.2 CPU1的IPC中断代码
__interrupt void IPC_1_ISR(void)
{
int i;
uint32_t command, addr, data;
IPC_readCommand(IPC_CPU1_L_CPU2_R, IPC_FLAG1, IPC_ADDR_CORRECTION_ENABLE,
&command, &addr, &data);
if(command == IPC_CMD_RESP)
{
float* recvData = (float*)addr;
for(i=0; i<data; i++)
{
printf("Float[%d] = %f\r\n", i, recvData[i]);
}
}
IPC_ackFlagRtoL(IPC_CPU1_L_CPU2_R, IPC_FLAG1);
Interrupt_clearACKGroup(IPC_1_INTERRUPT_ACK_GROUP);
}2.3 CPU2的主函数IPC代码
第一步:同CPU1的一样,清除IPC标志位,通过IPC_FLAG31同步两个CPU时钟,代码如下
IPC_clearFlagLtoR(IPC_CPU2_L_CPU1_R, IPC_FLAG_ALL);//清除IPC的所有标志位
IPC_sync(IPC_CPU2_L_CPU1_R, IPC_FLAG31);//通过IPC_FLAG31同步两个CPU时钟第一行解释为:清除CPU1与CPU2通信的IPC的所有FLAG。
第二行解释为:同步CPU时钟代码。
第二步:设置要发送的信息,代码为下:
#pragma DATA_SECTION(Data,"MSGRAM_CPU2_TO_CPU1")
float Data[10];
int i,j;
for(i = 0; i < 10; i++)
{
Data[i] = i + j*0.1f; // 与CPU1的内容区分
}第一行解释为:同CPU1一样,是 TI 编译器的一条 编译指令(pragma 指令) ,用于将变量 Data 放入指定的内存段 "MSGRAM_CPU2_TO_CPU1" 中,而不是默认的数据段(如 .data、.bss)
地址在:
MEMORY
{
CPU1TOCPU2RAM : origin = 0x03A000, length = 0x000800
CPU2TOCPU1RAM : origin = 0x03B000, length = 0x000800
}
SECTIONS
{
MSGRAM_CPU1_TO_CPU2 : > CPU1TOCPU2RAM, type=NOINIT
MSGRAM_CPU2_TO_CPU1 : > CPU2TOCPU1RAM, type=NOINIT
}第二行解释位:定义发送数据类型,定义为了一个数组。
第三,四,五行解释为:对数据进行初始化。
第四步:发送数据
while(1)
{
DEVICE_DELAY_US(5000000);
IPC_sendCommand(IPC_CPU2_L_CPU1_R, IPC_FLAG1, IPC_ADDR_CORRECTION_ENABLE,
IPC_CMD_RESP, (uint32_t)Data, 10);
for(i = 0; i < 10; i++)
{
Data[i] = i + j*0.1f; // 与CPU1的内容区分
}
}延迟是为了防止数据发送较快,看不出效果,IPC_sendCommand函数中为要发送的数据,数据使用了地址修正功能,
为对数据发送没有影响,可以理解为对数据的功能进行标定,方便对数据进行存储,处理。
CPU2主函数总代码为:
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "IPC.h"
#include "Interrupt.h"
#include "stdio.h"
int i,j;
#pragma DATA_SECTION(Data, "MSGRAM_CPU2_TO_CPU1")
float Data[10];
void main(void)
{
Device_init();//初始化设备时钟和外设
Interrupt_initModule();//初始化PIE,清除PIE寄存器,失能CPU中断
Interrupt_initVectorTable();//初始化PIE向量表
Board_init();//初始化SysConfig配置的外设
IPC_clearFlagLtoR(IPC_CPU2_L_CPU1_R, IPC_FLAG_ALL);//清除IPC的所有标志位
IPC_sync(IPC_CPU2_L_CPU1_R, IPC_FLAG31);//通过IPC_FLAG31同步两个CPU时钟
EINT;//使能所有中断
ERTM;//使能允许调试
while(1)
{
DEVICE_DELAY_US(5000000);
IPC_sendCommand(IPC_CPU2_L_CPU1_R, IPC_FLAG1, IPC_ADDR_CORRECTION_ENABLE,
IPC_CMD_RESP, (uint32_t)Data, 10);
j++;
for(i = 0; i < 10; i++)
{
Data[i] = i + j*0.1f; // 与CPU1的内容区分
}
}
}2.4 CPU2的IPC中断代码为
__interrupt void IPC_0_ISR()
{
int i;
uint32_t command, addr, data;
IPC_readCommand(IPC_CPU2_L_CPU1_R, IPC_FLAG0, IPC_ADDR_CORRECTION_ENABLE,
&command, &addr, &data);
if(command == IPC_CMD_READ_MEM)
{
float* recvData = (float*)addr;
for(i=0; i<data; i++)
{
printf("Float[%d] = %f\r\n", i, recvData[i]);
}
}
IPC_ackFlagRtoL(IPC_CPU2_L_CPU1_R, IPC_FLAG0);
Interrupt_clearACKGroup(IPC_0_INTERRUPT_ACK_GROUP);
}第三章 测试结果
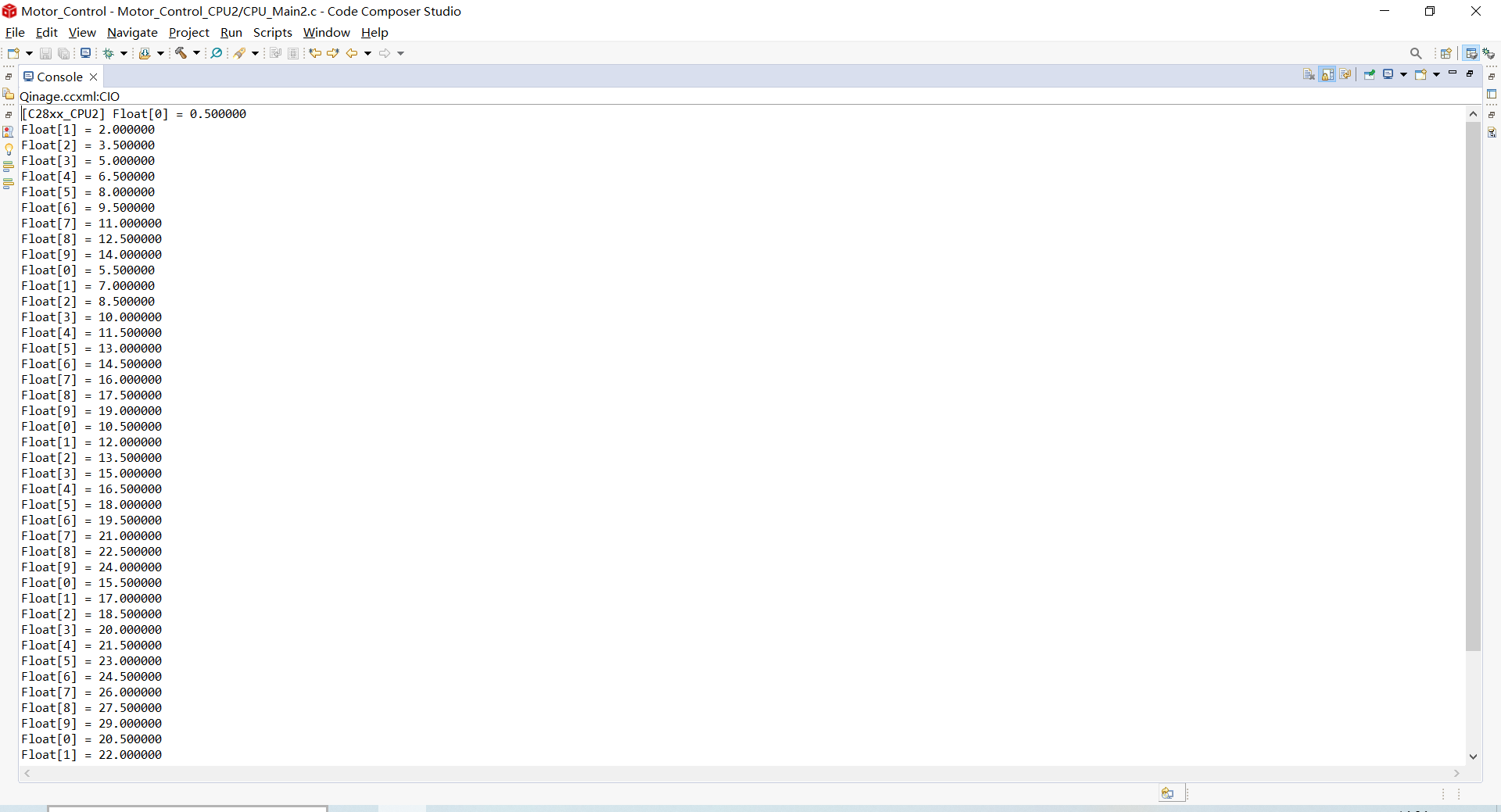
CPU1接收到的数据为:
该数据是由CPU2发送的,发送的数据代码为:
for(i = 0; i < 10; i++)
{
Data[i] = i + j*0.1f; // 与CPU1的内容区分
}CPU1接收到的数据符合我们想要发送的数据。通信正常,关于如何使用printf函数,我的上一篇博客有详细的介绍。链接为:TMS320F28388使用sysconfig配置SCI通信(RS485+FIFO+Modbus)
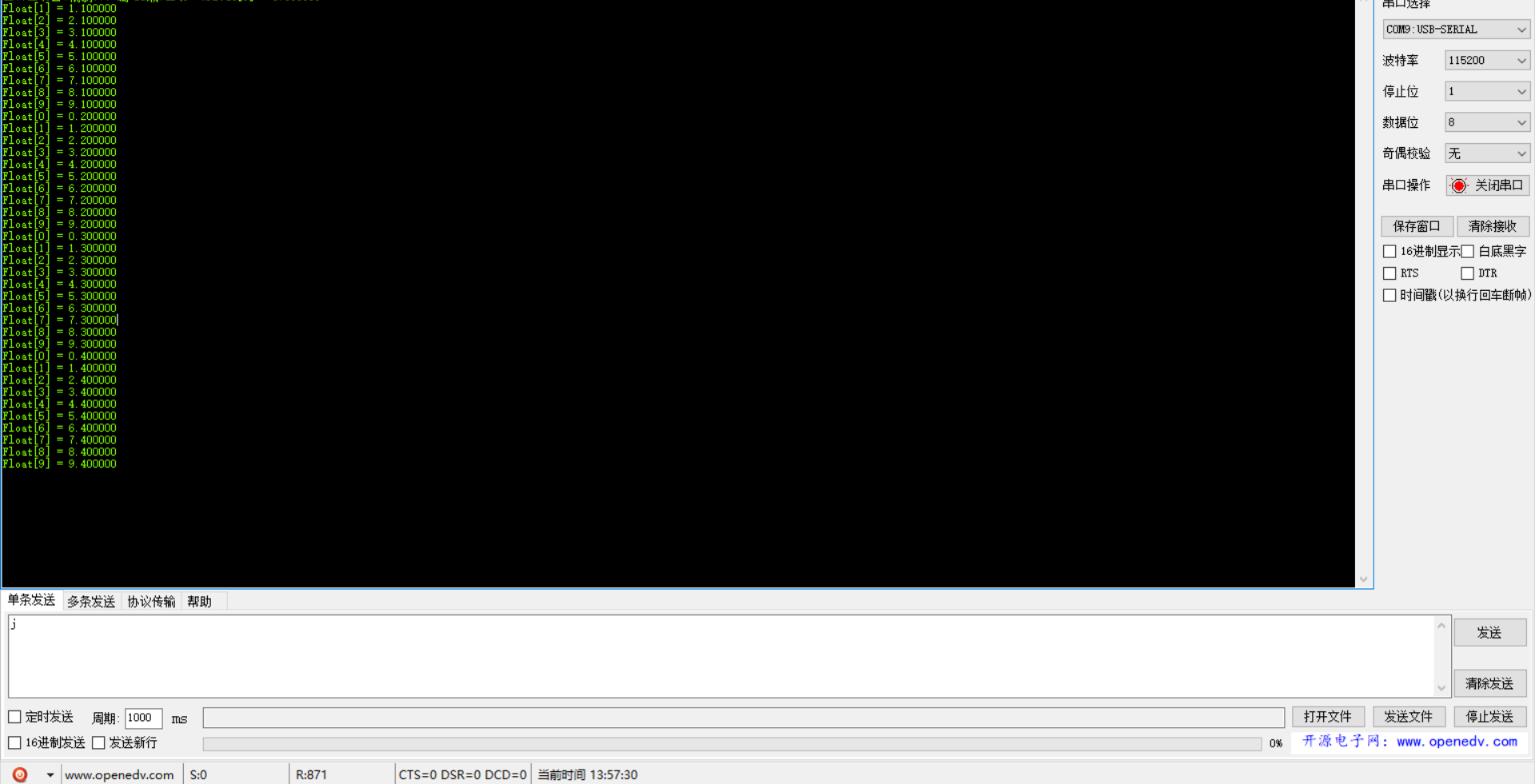
CPU2接收到的数据为:
该数据是由CPU1发送的,发送的数据代码为:
for(i=0; i<10; i++)
{
j++;
readData[i] = i + j*0.5f;
}CPU2接收到的数据也符合我们想要发送的数据。通信正常,关于如何使用printf函数打印到控制台,我的上一篇博客也有详细的介绍。链接为:TMS320F28388使用sysconfig配置SCI通信(RS485+FIFO+Modbus)
制作不易,使用请点赞收藏。