农业机器人的开发
喷农药机器人
番茄采摘机器人
葡萄采摘机器人
黄瓜采摘机器人
西瓜采摘机器人
蘑菇采摘机器人
草莓采摘机器人
- 草莓采摘机器人综述
- 视觉系统
CCD摄像机,距离传感器,PC计算机
其中CCD摄像机的作用是进行彩色图像的采集和进行果实的检测;
距离传感器是用于检测果实的方向和距离,也就是空间位置,然后利用计算机对二维图像进行分析,推测处三维信息的果实部分,然后获取三维信息,最后控制机器人进行采摘。
- 多自由度机械手
- 末端执行器
- 采摘数据库
机器人系统最好建立一个采摘数据库,这个数据库能够记录果实的成熟度,果实的大小,形状等信息。
运行逻辑:
- 使用机器视觉系统定位处采摘成熟草莓的空间位置;
- 采摘机械手移动到设定的位置;
- 末端执行器接近要采摘的目标
- 移动关节抓手,进行切断果梗,完成采摘
- 综述
目标识别,目标提取,目标定位,机械手臂控制
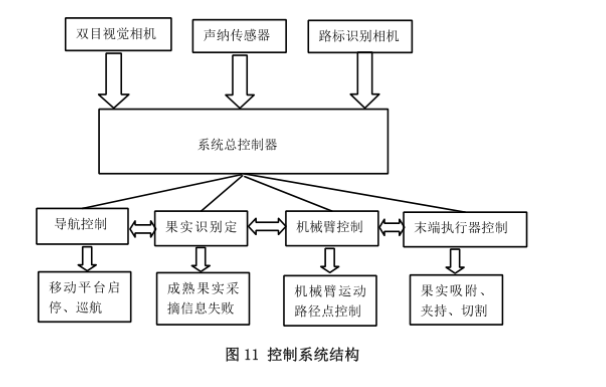
机器人分为机械部分,传感器部分,控制部分。然后分为多个系统:包括设备行走系统、机械手移动和抓取系统、驱动系统、视觉系统、控制系统、人机交互系统。
视觉系统一般采用双目视觉方法对目标进行定位
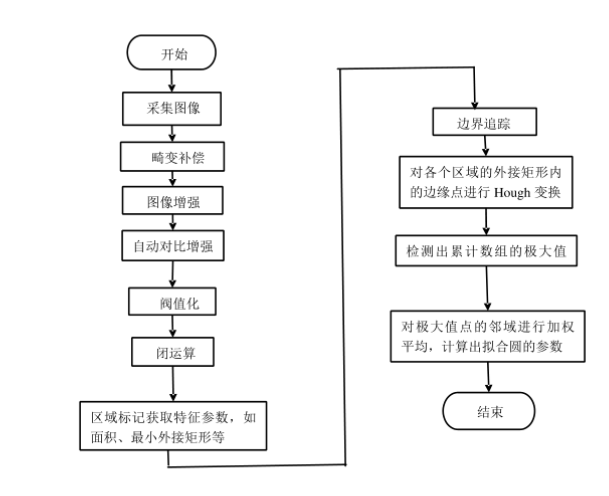
- 图像识别算法